Аннотация
В статье обсуждается задача построения лабораторного макета системы автоматического управления движением шара на желобе. Приводится математическая модель объекта управления и передаточная функция приводного механизма. Объект управления совместно с приводом представляют собой структурно неустойчивую систему. Для обеспечения устойчивости и приемлемого качества управления предложен стабилизирующий регулятор. Приводятся и обсуждаются результаты моделирования системы управления.
В настоящее время компьютерные технологии все более широко используются в различных областях промышленности. Непрерывный рост производительности микроконтроллеров и появление новых программных комплексов способствуют быстрому осуществлению проектов по автоматизации всевозможных объектов управления.
Однако, проектирование, эксплуатация и совершенствование систем автоматического управления, принятие оптимальных решений и нахождение необходимого и правильного способа автоматизации являются сложными задачами, для решения которых нужны квалифицированные специалисты в области управления и моделирования систем. Очевидно, что для подготовки высококвалифицированных специалистов, которые бы имели глубокие теоретические знания и имели практические навыки работы в области электроники, автоматики, а также в области телекоммуникационных систем и сетей, нужно в учебном процессе использовать достаточно простые наглядные пособия и макеты систем автоматики, которые были бы изготовлены при непосредственном участии студентов. Работа студентов над такими проектами дает им возможность на практике использовать теоретические знания, причем короткий период между услышанным на лекции и практическим применением теории способствует лучшему усвоению изучаемого материала.
Одним из таких проектов, выполняемых на кафедре автоматики и телекоммуникаций, является проект по разработке робастной системы автоматического управления положением шара на желобе. Техническим заданием на проект предусматривается использование видеокамеры как информационно-измерительной системы для определения положения шара на желобе. Изменение наклона желоба осуществляется двигателем постоянного тока (как вариант – шаговым двигателем). Регуляторы, - а лабораторная установка должна быть создана так, чтобы можно было использовать различные регуляторы, реализуются на микроконтроллере Arduino. С точки зрения теории автоматического регулирования ничего необычного в проекте нет, но то, что установка создается при непосредственном участии студентов, играет немаловажную роль при изучении ряда дисциплин. Для реализации проекта студенты должны выполнить ряд задач:
– получить математическое описание движения шара по наклонному желобу и определить численные значения параметров объекта регулирования;
– разработать структурную схему системы управления положение шара на желобе, предполагая идеальной систему определения координаты шара на желобе;
– экспериментально подобрать структуру и параметры регулятора;
– провести моделирование в среде Matlab замкнутой системы регулирования;
– разработать на основе видеокамеры и соответствующего программного обеспечения информационно-измерительную систему для определения положения шара на желобе;
– исследовать влияние различных факторов на качество системы управления (неравномерность расстояния между краями желоба, шероховатость поверхности шара, люфт в приводе и др.);
– разработать электрическую принципиальную схему системы управления на основе микроконтроллера;
– провести синтез робастного регулятора, обеспечивающего заданное качество регулирования при наличии неопределенностей;
– решить задачу оптимального управления объектом для обеспечения минимума функционалов качества при наличии ограничений на управление и проверить решение на лабораторной установке.
В статье рассматриваются результаты решения первых четырех из перечисленных выше задач.
Уравнение движения шара по наклонному желобу
Рассмотрим систему автоматического управления шарика на подвижном желобе. Желоб представляет собой направляющую, по которой движется шар. Также имеется сервопривод, приводящий в движение направляющую. Изменяя его наклон, можно менять положение шара.
Уравнение движения шара по наклонному желобу получим при следующих допущениях [1]: шар массой m и радиусом R катится без проскальзывания по двум параллельным направляющим желоба, установленным под углом к горизонту на расстоянии 2L>2R друг от друга (рис.1). На шар действуют сила тяжести mg, приложенная к центру масс, результирующая N двух сил реакции со стороны желоба, перпендикулярная наклонной плоскости, образованной направляющими, и проходящая через центр масс шара, а также результирующая Fтр двух сил трения покоя, действующая вдоль направляющих.
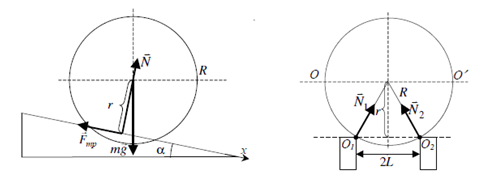
Рисунок 1 – Шар на наклонном желобе
Движение шара описывается системой двух уравнений (уравнение движения центра масс и уравнение моментов):
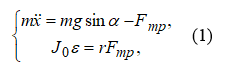
где J0 - момент инерции шара относительно оси;
r - плечо силы трения Fтр;
e - угловое ускорение.
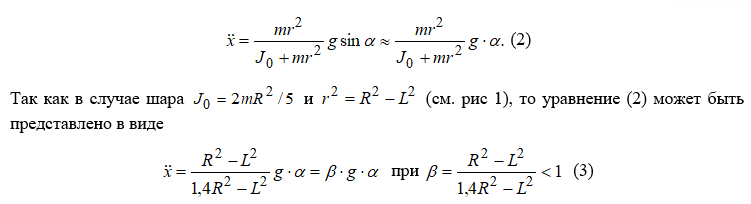
Умножив первое уравнение из (1) на r и сложив его со вторым с учетом x=re, получим уравнение движения шара по наклонному желобу при отсутствии проскальзывания в виде
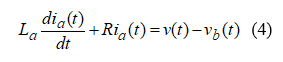
Изменение угла наклона желоба осуществляется при помощи двигателя постоянного тока, динамику которого необходимо учитывать в совокупности с желобом. На основании второго закона Кирхгофа запишем уравнение для тока цепи якоря двигателя, которая характеризуется индуктивностью и активным сопротивлением:
Крутящий момент на валу двигателя пропорционален току якоря с коэффициентом пропорциональности, равному механической постоянной двигателя. Этот момент обусловливает разгон двигателя в соответствии с уравнением (5):

Применив к уравнениям (4) и (5) преобразование Лапласа и исключив из обоих уравнений, получим следующую передаточную функцию двигателя, связывающую скорость вращения оси якоря и напряжение питания двигателя (6):
Принимая во внимание тот факт, что индуктивность обмотки якоря составляет величину микрогенри, а активное сопротивление – порядка нескольких ом, постоянной времени цепи якоря можно пренебречь. В этом случае передаточной функцией двигателя, связывающей угол поворота оси якоря двигателя и напряжение питания двигателя, является передаточная функция (7):
В предположении идеальности системы определения координаты структурную схему системы автоматического управления положением шара на желобе можно представить так, как показано на рис.2. Очевидно, что система при трех последовательно включенных интеграторах будет структурно неустойчивой. Соответствующим выбором структуры и параметров регулятора по методике, изложенной в [2], удается стабилизировать замкнутый контур.

Рисунок 2 – Структурная схема САУ положением шара на желобе
Моделирование замкнутой системы средствами Matlab показывает, что система устойчива и при отработке единичного ступенчатого воздействия показывает допустимый характер переходного процесса и приемлемые углы наклона желоба (рис. 3а и 3б).
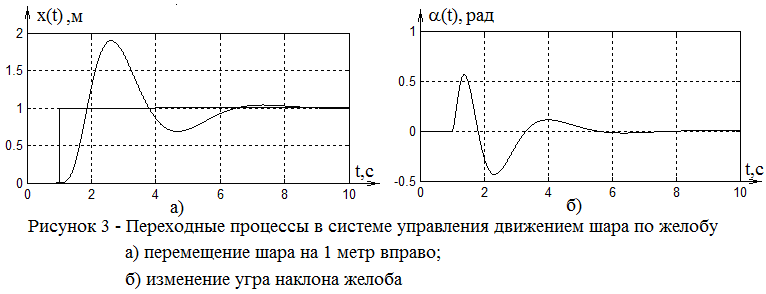
Вместе с тем выходная величина регулятора составляет величину порядка 0,2 – 0,3 В, что явно недостаточно для обеспечения нормального пуска электродвигателя. Более того, при наличии зоны нечувствительности электродвигателя потребуется проведение необходимых мер по компенсации зоны нечувствительности.
Перечень ссылок
1. Митин И.В. Задача № 125 Изучение движения шара по наклонному желобу. Лабораторный практикум по физике. Механика. Москва, 2011. – [Электронный ресурс] http://genphys.phys.msu.su/... Режим доступа 03.04.2016.
2. Хорхордин А.В., Батыр С.С., Безрук А.А. О выборе параметров преобразования Мебиуса при конструировании стабилизирующих регуляторов. Наукові праці Донецького національного технічного університету. Серія Обчислювальна техніка та автоматизація. Випуск 24(202). – Донецьк: ДонНТУ, 2013. С.152-160.
3. Методы классической и современной теории автоматического управления: учебник в 5 томах., Т3: Синтез регуляторов систем автоматического управления. Под ред. Н.Д.Егупова.- М.: изд.МГТУ им. Н.Э.Баумана, 2004. - 617c.