
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования, планируемые результаты
- 3. Обзор существующих методов выделения контуров изображения
- 4. Обзор международных источников
- 5. Выделение и описание элементов изображения
- 6. Обзор некоторых существующих методов
- 6.1 Детектор границ Canny
- 6.2 Отслеживающие алгоритмы
- 6.3 Способы описания контуров
- Выводы
- Список источников
Введение
Выделение границ изображений является ключевым элементов современных систем компьютерного зрения при решении ряда прикладных задач, связанных с распознаванием образов. Границы представляют собой подмножество точек исходного изображения, связанные с границами предметов или другими существенными элементами изображения.
Алгоритмы выделения границ и привязка их к существенным элементам изображения называют детекторами краев (edge detection). Точки изображения, в которых яркость изменяется особенно сильно, называют краевыми точками, а их совокупность формирует края областей изображения. Детекторы краев используют для анализа принадлежности рассматриваемой точки исходного изображения локальный фрагмент изображения, на основании анализа которого делается вывод о наличии краевой точки.
1. Актуальность темы
Выделение границ изображений является ключевым элементов современных систем компьютерного зрения при решении ряда прикладных задач, связанных с распознаванием образов. Научной новизной данной работы является разработка алгоритма выделения контуров на слабоконтрастных полутоновых изображениях. Существующие на сегодняшний день алгоритмы выделения контуров плохо справляются с низкой контрастностью объектов и фона, а также крайне чувствительны к шуму на изображении. Разрабатываемый алгоритм будет направлен на максимальное выделение всех границ объектов и на подавление обнаруженных ложных контуров, которые зачастую возникают от присутствия импульсного шума.
При анализе изображений и распознавании объектов, присутствующих на нем, весомую долю принимают на себя методы и алгоритмы выделения контуров, так как они значительно упрощают работу с изображением и/или цифровым рядом. Но большинство существующих на сегодняшний день алгоритмов не может предоставить достаточно хорошую точность выделения контура объектов, так как всегда присутствуют разрывы и ложные границы. Это в значительной степени усложняет дальнейшую работу над изображением. Данная работа нацелена на разработку алгоритма, позволяющего максимально улучшить выделение границ изображения путем комбинации и модификации существующих алгоритмов нахождения контуров объкта на изображении с применением всевозможных методов распознавания.
2. Цель и задачи исследования, планируемые результаты
Цель написания работы – исследование и разработка алгоритмов задачи Edge Detection на зашумленных изображениях с использованием эволюционных алгоритмов. А также ознакомиться с применением всевозможных методов распознавания.
Как правило, детекторы краев дают большой выход при наличии резких локальных изменений яркости. Широкий класс систем технического зрения эксплуатируется в условиях наличия шумов и помех. Шумы существенным образом искажают информацию о положении краевых точек, что приводит к появлению двух типов возможных ошибок. Первый тип связан с пропуском реально существующей краевой точки, а второй, с появлением ложной. Детектор краев CANNY считается одним из лучших, он не работоспособен при наличии шумов.
Основные задачи исследования:
Улучшение качества детекторов краев требует увеличения площади фрагмента изображения, используемого для принятия решения о наличии краевой точки, а также сложных алгоритмов обработки. С точки зрения реализации это означает необходимость выполнения большого объема вычислений. Естественно, что для видеосистем сложность реализации помехоустойчивых фильтров границ существенно сложнее из-за необходимости обрабатывать 25 – 30 кадров в секунду.
Можно констатировать, что проблема разработки помехоустойчивых детекторов краев является актуальной, а способы ее решения во многом определяют параметры подсистем технического зрения. Как показывает анализ, решение задачи обработки видеоинформации невозможно без применения параллельных вычислений. Одним из возможных вариантов реализации помехоустойчивых детекторов краев является использование методологии нейронных сетей.
3. Обзор исследований и разработок
Выделение контуров изображений – определение в теории обработки изображения и компьютерного зрения, частично из области поиска объектов и выделения объектов, основывается на алгоритмах, которые выделяют точки цифрового изображения, в которых резко меняется яркость или есть другие виды неоднородностей.
В идеальном случае, результатом выделения контуров является набор связанных кривых, обозначающих границы объектов, граней и отпечатков на поверхности, а также кривые отражающие изменения положения поверхностей. Таким образом, применение фильтра выделения границ к изображению может существенно уменьшить количество обрабатываемых данных, из-за того, что отфильтрованная часть изображения считается менее значимым, а наиболее важные структурные свойства изображения сохраняются.
Однако не всегда возможно выделить контур в картинах реального мира средней сложности. Границы выделены из таких изображений часто имеют такие недостатки как фрагментированность (кривые контуров отсутствует соединение между собой), отсутствие границ или наличие ложных, не соответствующих изучаемому объекту.
Существует множество подходов к выделению контуров изображений, но почти все можно разделить на две категории: методы, основанные на поиске максимумов, и методы, основанные на поиске нулей.
Методы, основанные на поиске максимумов, выделяют контуры с помощью вычисления «силы края», обычно выражения первой производной, такого как величина градиента, и затем поиска локальных максимумов силы края, используя предполагаемое направление контура, обычно перпендикуляр к вектору градиента.
Методы, основанные на поиске нулей, ищут пересечения оси абсцисс выражения второй производной, обычно нули Лапласиан или нули нелинейного дифференциального выражения. В качестве шага предварительной обработки к выделению границ практически всегда применяется сглаживание изображения, обычно фильтром Гаусса. Методы выделения контуров отличаются применяемыми фильтрами сглаживания. Хотя много методов выделения границ основываются на вычислении градиента изображения, они отличаются типами фильтров, применяемых для вычисления градиентов в x- и y-направлениях.
4 Обзор международных источников
В работе (Гонсалес,Вудс) глава 10[1] посвящена сегментации изображений, а глава 11 - их представлению и описанию. Подробность изложения всех вопросов достаточно высокая. Данная книга наилучшим образом подходит для дополнительного изучения данной темы в целом.
В работе (Зарит) глава 9[2] посвящена анализу и синтезу текстуртекстур на основе частотных подходов и различных разложений[3]. Поскольку этот вопрос совсем не затрагивается в нашем кратком курсе, данная глава может быть рекомендована целиком в качестве материала для дополнительного самостоятельного изучения.
В работе (Лаксми, Санкаканяанан) работе с текстурами посвящена глава 7[3]. Логика изложения соответствует нашему курсу, но объем существенно больше и изложение подробнее и глубже. Поскольку тема текстурного анализа описана нами чрезвычайно кратко, данная глава из также может быть рекомендована целиком в качестве материала для дополнительного самостоятельного изучения.
В главах 14 и 16 работы (Зуев)[4] задача сегментации изображения (в широком смысле) рассматривается соответственно в контексте кластеризации (разбиения выборки на классы) и вероятностной оптимизации (максимума апостериорной вероятности и байесовского подхода). Эти подходы к сегментации изображений на области практически не раскрываются в нашем курсе, поэтому рекомендуется ознакомиться с 14 и 16 главами книги в рамках углубленного самостоятельного изучения данного курса.
5. Выделение и описание элементов изображения
По мере возрастания требований к точности и надежности алгоритмов обнаружения все более сложных объектов во все более сложной реальной обстановке недостатки данной группы методов стали проявляться все более явно. Это, прежде всего, высокая вероятность аномальных ошибок, необхоодимость иметь большое число эталонов для описания разноракурсных образов трехмерных объектов, неустойчивость по отношению к яркостно-геометрической изменчивости изображений, имеющей место в реальных условиях регистрации. Таким образом, наметился переход от корреляционных детекторов заданных образов к методам и алгоритмам структурного анализа изображений.
В настоящее время последовательность процедур обработки изображений принято рассматривать в соответствии с так называемой парадигмой Марра . Эта парадигма, предложенная Д.Марром на основе длительного изучения механизмов зрительного восприятия человека, утверждает, что обработка изображений опирается на несколько последовательных уровней восходящей информационной линии "иконическое представление объектов (растровое изображение, неструктурированная информация) - символическое представление (векторные и атрибутивные данные в структурированной форме, реляционные структуры)" и должна осуществляться по модульному принципу посредством следующих этапов обработки:
- Предобработка изображения;
- Первичная сегментация изображения;
- Выделение геометрической структуры видимого поля;
- Определение относительной структуры и семантики видимой сцены.
Связанные с этими этапами уровни обработки обычно называются обработки нижнего, среднего и высокого уровней, соответственно. В то время как алгоритмы обработки нижнего уровня (фильтрация простых шумов, гистограммная обработка) могут рассматриваться как хорошо проработанные и детально изученные, алгоритмы среднего уровня (сегментация) продолжают сегодня оставаться центральным полем приложения исследовательских усилий. За последние годы значительный прогресс был достигнут по отношению к проблемам сопоставления точек и фрагментов изображений (matching) выделения признаков внутри малых фрагментов высокой точности 3D-позиционирования точек что подразумевает соответствующее моделирование и калибровку датчиков и их комбинаций, выделение простых яркостно-геометрических структур типа "точка", "край", "пятно", "прямая линия", "угол". Эти "первичные" особенности изображения, также называемые характерными чертами (ХЧ), играют базовую роль при составлении яркостно-геометрических моделей объектов и разработке робастных алгоритмов их выделения.
На рисунке 5.1 приведена классификация характерных черт (ХЧ), которые могут присутствовать на изображениях.
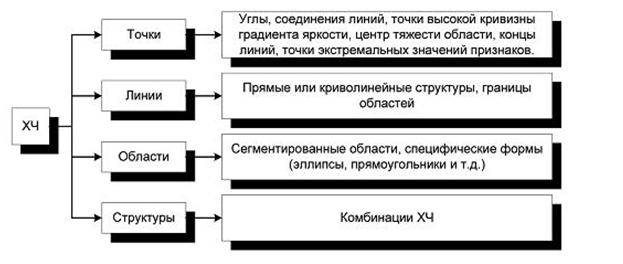
Рисунок 5.1 – классификация характерных черт (ХЧ)
При работе с реальными изображениями перечисленные критерии являются противоречивыми. Поэтому конкретный выбор ХЧ и их атрибутов зависит от доступной вычислительной мощности и от минимальной требуемой робастности описания модели объекта в терминах ХЧ. Данная таблица демонстрирует противоречивость разных типов ХЧ в смысле различных критериев. Если говорить о методах и алгоритмах обнаружения сложных объектов, то одна из центральных проблем, отличающих методы обработки изображений от хорошо изученной теории обработки сигналов, заключается в разработке методов обнаружения объектов, слабо чувствительных к разнообразным видам изменчивости, характерным лишь для изображений. Такими специфическими видами изменчивости являются ракурсные и радиометрические искажения, а также различные виды искажений, не сводимые к вероятностным моделям (шумы формы). На пути борьбы с ними были предложены как огромное множество эвристических алгоритмов обнаружения конкретных типов объектов, так и ряд подходов, обладающих большей общностью: методы корреляционного обнаружения преобразование Хафа морфологические подходы Пытьева и Серра. Значительный вклад в разработку методов и алгоритмов обработки изображений и машинного зрения применительно к обсуждаемым задачам обнаружения внесли работы Л.П.Ярославского, В.К.Злобина, В.Л.Лёвшина, Р.Харалика, Е.Дэвиса, Р.Неватиа, Е.Дикманнса, В.Фёрстнера и многих других. Однако, несмотря на достигнутые результаты, общее состояние проблемы выделения и идентификации сложноструктурированных объектов на моноскопических изображениях можно охарактеризовать как неудовлетворительное. Еще сложнее выглядит задача обнаружения трехмерных структур на стереоскопических изображениях. Здесь только намечаются подходы к более общим постановкам.
6. Обзор исследований и разработок
6.1 Детектор границ Canny
John Canny описал алгоритмы обнаружения границ, которые с тех пор стали одними из наиболее широко используемых. Можно сказать, что они стали классикой в области обнаружения границ. Canny исходил из трех критериев, которым должен удовлетворять детектор границ:
- Хорошее обнаружение (Canny трактовал это свойство как повышение отношения сигнал/шум);
- Хорошая локализация (правильное определение положения границы);
- Единственный отклик на одну границу.
Из этих критериев затем строилась целевая функция стоимости ошибок, минимизацией которой находится "оптимальный" линейный оператор для свертки с изображением. Алгоритм детектора границ Canny не ограничивается вычислением градиента сглаженного изображения. В контуре границы оставляются только точки максимума градиента изображения, а не максимальные точки, лежащие рядом с границей, удаляются. Здесь также используется информация о направлении границы для того, чтобы удалять точки именно рядом с границей и не разрывать саму границу вблизи локальных максимумов градиента. Затем с помощью двух порогов удаляются слабые границы. Фрагмент границы при этом обрабатывается как целое. Если значение градиента где-нибудь на прослеживаемом фрагменте превысит верхний порог, то этот фрагмент остается также "допустимой" границей и в тех местах, где значение градиента падает ниже этого порога, до тех пор пока она не станет ниже нижнего порога. Если же на всем фрагменте нет ни одной точки со значением большим верхнего порога, то он удаляется. Такой гистерезис позволяет снизить число разрывов в выходных границах. Включение в алгоритм Canny шумоподавления с одной стороны повышает устойчивость результатов, а с другой – увеличивает вычислительные затраты и приводит к искажению и даже потере подробностей границ. Так, например, таким алгоритмом скругляются углы объектов и разрушаются границы в точках соединений[5][6].
6.2 Отслеживающие алгоритмы
Отслеживающие методы основаны на том, что на изображении отыскивается объект (первая встретившаяся точка объекта) и контур объекта отслеживается и векторизуется. Достоинством данных алгоритмов является их простота, к недостаткам можно отнести их последовательную реализацию и некоторую сложность при поиске и обработке внутренних контуров, а так же необходимость применения сканирования, для обнаружения очень маленьких контуров.
Пример отслеживающего метода — метод жука — приведен на рисунке 6.1. Жук начинает движение с белой области по направлению к черной, Как только он попадает на черный элемент, он поворачивает налево и переходит к следующему элементу. Если этот элемент белый, то жук поворачивается направо, иначе — налево. Процедура повторяется до тех пор, пока жук не вернется в исходную точку. Координаты точек перехода с черного на белое и с белого на черное и описывают границу объекта.
На рисунке 3 показана схема работы такого алгоритма.
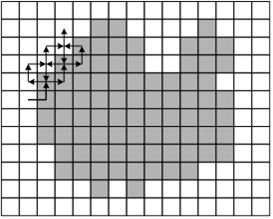
Рисунок 6.1 – Метод Жука
Метод, основанный на последовательном сканировании изображения (рисунок 6.2), заключается в поиске таких пар точек, для которых разность интенсивностей с соседними точками (вдоль направления сканирования) больше некоторого порога ?/2, а разность интенсивностей со всеми точками между искомыми не превышает этот порог[7]. К достоинствам данного метода можно отнести независимость времени обработки от количества контуров на карте и большей эффективностью по сравнению с отслеживающими алгоритмами.
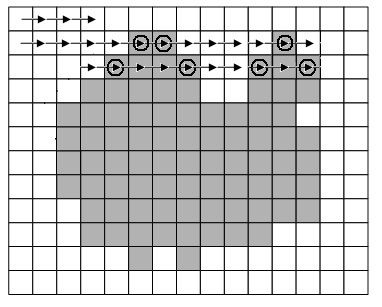
Рисунок 6.2 – Метод последовательного сканирования
6.3 Способы описания контуров
Дискретное представление кривой в виде последовательности точек с координатами (x,y)крайне неэффективно. Более эффективным является представление с помощью цепных кодов (chain code) при использовании которых вектор, соединяющий две соседние точки, кодируется одним символом, принадлежащим конечному множеств[7]у. Обычно при пользовании цепным кодом рассматривается окрестность точки размером 3?3 и 4 или 8 возможных направлений кодирования (рисунок 5.1).
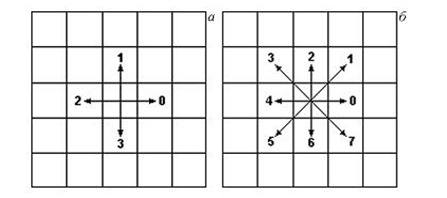
Рисунок 6.3 – Направления кодирования в цепных кодах:
а?4 направления, б - 8 направленийНачиная с первой точки, производится обход контура по часовой стрелке, при этом каждая последующая точка кодируется числом 1 - 8, в зависимости от своего расположения относительно центральной точки окрестности. Результатом кодирования является последовательность, состоящая из цифр 1 - 8. Пример кодирования кривой при помощи цепного кода: 77121076667110076771122334. Данный способ представления кривой имеет следующие недостатки.
- Зависимость от начальной точки кодирования.
- Не обладает свойством инвариантности к вращению.
- Неустойчивость к зашумлению.
- Рассмотрены возможности комплексной автоматизации разработанного подхода к унификации синтеза автоматов Мура, оценены требования к программному обеспечению, выполнен поиск функционально подобных программных продуктов синтеза последовательностных логических схем.
Рисунок 6.4 – Процесс выделения контуров изображения
(анимация: 7 кадров, 7 циклов повторения, 36 килобайт)Локальные изменения контура могут привести к различным результатам кодирования. Другим способом представления кривой является кусочно-полиномиальная аппроксимация. Задача аппроксимации заключается в отыскании кривой, проходящей вблизи заданного множества точек контура. Кривая разбивается отдельными узлами на отрезки, при этом аппроксимирующая функция на каждом из них имеет вид:

где an - коэффициенты полинома, подлежащие определению на каждом отрезке.
В качестве характерных признаков можно использовать число и положения особых точек контура (точки максимального перегиба, локальные экстремумы функции кривизны, концевые точки, точки ветвления). В первую очередь, на контуре стараются выделить так называемые угловые (контрольные) точки, то есть точки, имеющие максимальную кривизну в определенной окрестности, т.к. концевые точки и точки ветвления являются недостаточно надежными признаками и в значительной степени подвержены влияниям шумов. Переход обратно к точечным характеристикам позволяет использовать методы отождествления, описанные в предыдущей главе[8].
Существенным отличием метода выделения характерных точек на контурах является то, что в качестве опорной информации используются не яркостные, а геометрические особенности объекта.
В данной работе были рассмотрены различные варианты выделения особых точек на полученных контурах. Наиболее простым и быстрым способом является описанный выше поиск точек максимального перегиба при помощи итеративного алгоритма подбора концевых точек. Однако использование данного алгоритма не принесло положительных результатов. Неустойчивость его работы определяется достаточно сильной зависимостью результатов поиска точек от начальных условий (концевых точек контура). Недостаточная помехозащищенность не позволяет использовать данный метод для выделения особых точек на контурах.
7. Проблемы и нерешенные вопросы в области контурного анализа изображения
Исследуя данную проблему, становятся очевидным, что с одной стороны этот вопрос освещается весьма широко, хотя непосредственно в Украине он затронут весьма поверхностно, больше внимания его изучению уделяется за рубежом[9]. Со временем исследования в области методов контурного анализа становятся все глубже и глубже, однако по мере того, как изучаемая область становится шире, появляется все больше и больше вопросов для дальнейшего рассмотрения.
Все еще не решена проблема получения идеального замкнутого контура, хотя современные методы весьма приближают решение этой проблемы. Также остается открытым вопрос о том, как отбросить ложные контуры, не затронув при этом другие, которые являются истинными. Кроме того, часто при получении изображения для дальнейшей обработки возникает проблема наложения контура. Таким образом, разделение контуров также является все еще не до конца нерешенной проблемой.
Исследования в данной области будут актуальными до тех пор, пока не решатся хотя бы эти вопросы[10]. Обработка изображений довольно современная проблема и многие ученые, работающие в данном направлении предлагают свои методы решения. Например, Фомин Я. А. В своих работах «Распознавание образов: теория и применения» предлагатет следующую идею: по его мнению, точность выделения краев можно повысить путем их прослеживания на последовательности изображений, полученных в разные моменты времени.
Выводы
В данной работе были рассмотрены различные варианты выделения особых точек на полученных контурах. Наиболее простым способом является описанный выше прослеживания контуров при помощи итеративного алгоритма подбора концевых точек. Однако использование данного алгоритма не принесло положительных результатов. Неустойчивость его работы определяется достаточно сильной зависимостью результатов поиска точек от начальных условий (концевых точек контура и зашумленности изображения). Недостаточная помехозащищенность не позволяет использовать данный метод для выделения особых точек на контурах.
В дальнейшем будет сделана попытка углубиться в исследования с целью внедрения новых разработанных технологий в различные сферы деятельности. За рубежом использование данных алгоритмов нахождения контура объектов на зашумленных изображениях встречается практически повсеместно, т. к. выделение контуров отдельных объектов весьма облегчает дальнейший поиск этих объектов. Будем надеяться, что развитие передовых технологий в данной области в нашей время в скором также будет иметь место.
Примечание
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: Май 2019 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
- Gonzalez D., Woods D., Hildreth E. Theory of edge detection/Dslash Proc. R. Soc. (London). 2009. B207. 187 – 217c.
- B.D. Zarit, International Journal of Computer Science & Information Technology (IJCSIT), 3(6). — С. 259–267.
- Lakshmi S, Sankaranarayanan V. (2010) A Study of edge detection techniques for segmentation computing approaches, Computer Aided Soft Computing Techniques for Imaging and Biomedical Applications. — P. 35–41.
- Ramadevi Y. (2010) Segmentation and object recognition using edge detection techniques, International Journal of Computer Science and Information Technology, Vol 2, No.6. — P. 153–161.
- Зуев А.А. Методы выделения контуров на изображениях / А.А. Зуев, Г.Е. Нечепоренко // Международная научная конференция MicroCAD: Секцiя № 8 — Мікропроцесорна техніка в автоматиці та приладобудуванні — НТУ ХПИ, 2012. — С. 108.
- Самаль Д.И. Выбор признаков для распознавания на основе статистических данных / Д.И. Самал, В.В. Головенко – Минск: ИТК, 1999. – 218 c.
- Самаль Д.И. Методика автоматизированного распознавания людей по фотопортретам / Д.И. Самал., В.В. Головенко – Минск: ИТК, 1999. –187 с.
- Вапник В. Н. Теория распознавания образов. / В. Н. Вапник, А. Я. Червоненкис – М.: Наука, 1974. – 416 с.
- Фомин Я. А. Распознавание образов: теория и применения / Фомин, Я.А. – 2-е изд. – М.: ФАЗИС, 2012. – 429 с.
- Чэн Ш.К. Принципы проектирования систем визуальной информации / Чэн, Ш.К. – М.: Мир, 1994. – 408 с.
- Аркадьев А. Г. Обучение машины распознаванию образов / А.Г. Аркадьев, Э. М. Браверман – М.: Наука, 1964. – 478 с.