
Реле защиты от перегрузки по току с использованием Arduino Uno для распределения и управления возобновляемой электроэнергии (РУВЭЭ)
Содержание
- Аннотация
- 1. Введение
- 2. Постановка задачи
- 3. Предлагаемый метод
- 4. Конструкция цепи
- 4.1 Arduino Uno микроконтроллер
- 4.2 Трансформатор тока с эффектом Холла ACS712
- 4.3 Твердотельное реле
- 4.4 Жидкокристаллический дисплей (ЖК)
- 5. Предлагаемое моделирование цепи и результаты
- 5.1 Сценарий-1: моделирование нормального инверсного реле
- 5.2 Сценарий 2: Моделирование усиленно инверсного реле максимального тока
- 5.3 Сценарий-3: Моделирование крайне инверсного реле максимального тока
- 6. Внедрение практической цепи
- Заключение
- Список источников
Аннотация
РУВЭЭ (распределение и управление возобновляемой электроэнергии) – это интеллектуальная сеть, которая обеспечивает широкую интеграцию между распределением возобновляемых энергетических ресурсов (РВЭР) и распределением хранения энергии устройства (РХЭУ) с обычной системой распределения. В этой статье представлены дизайн и реализация Arduino реле максимального тока на основе микроконтроллеров с различными характеристики (инверсные, усиленно инверсные и крайне инверсные) для системы РУВЭЭ. Модель с открытым исходным кодом и с простым использованием как аппаратного, так и программного обеспечения. Практическая печатная плата разработана с учетом входного и выходного мониторинга и защиты участка подключения твердотельного трансформатора (ТТ) к замкнутому контуру зоны в системе РУВЭЭ. Специальная программа разработана с помощью программного пакета Proteus и легко интегрируется в аппаратную карту. Чтобы проверить предложенное инверсное, усиленно инверсное и крайне инверсное реле максимального тока, характеристики тестируются с использованием предлагаемой системы симулятора и сравниваются с характеристикой, записанной общеизвестным стандартом МЭК 60255-151. Чтобы гарантировать эффективность системы, практическая схема, включая предлагаемое реле, подключена к небольшой нагрузке (двигатель) и обычно проверяется обратная характеристика реле. Предложенная схема защиты доказывает высокую производительность и точные результаты.
1. Введения
В 2008 году Национальный научный фонд (ННФ) сформировал новые интеллектуальные сети с поддержкой инновационных средств, называемых системой РУВЭЭ для интеграции зеленых РВЭР, РХЭУ и традиционных энергосистем. Новая форма сети приводит к лучшему использованию сохранению энергии и высокой надежности системы [1-3]. Главные компоненты системы РУВЭЭ показаны на рис. 1 [2]. Устройство обнаружения неисправностей (УОН), интеллектуальное обнаружение неисправностей (ИОН) и полупроводниковые трансформаторы (ПТ) являются тремя новыми основными оборудованиями в системе РУВЭЭ, которые улучшают защиту сети и качество электроэнергии. Основное преимущество трех оборудований – они являются статическими элементами, контролируемыми с помощью цифрового управления вместо обычного оборудования. ТТ – это твердотельные тиристоры или транзисторы определенного типа, управляемые цифровыми сигналами вместо обычных электромагнитных трансформаторов. В дополнение к контролю напряжения и фазовый сдвиг между напряжением и током, позволяет мощности протекать в обоих направлениях. Это имеет возможность ограничить погрешность тока до 2,0 у.е. уменьшением напряжения [3-5]. УОН – новое статическое оборудование, используемое для отключения и изоляции высоких значений асимметричных токов от повреждений в течение микросекунд вместо нормальных электромеханических выключателей, которые отключают за миллисекунды [2], [5]. Интеллектуальное управление энергией (ИУЭ) и интеллектуальные схемы управления обнаружением неисправностей (ИСУОН) объединены в системе БДВЭУЭ для достижения эффективного потока энергии, быстрого обнаружения и устранения неисправностей [4].
Замкнутый контур РУВЭЭ приводит к сильному величине короткого замыкания, падению напряжения и потоку мощности в двух направлениях [2]. Пилотно-дифференциальная защита с использованием связи используется как первичная защита, способная обнаруживать неисправности в циклах, тогда как защита от перегрузки по току используется в качестве резервной защиты в случае проблем/сбоев связи, [1-2]. Реле с обратной временной характеристикой максимального тока применяются для обнаружения неисправности в системе, как в [2], [6].
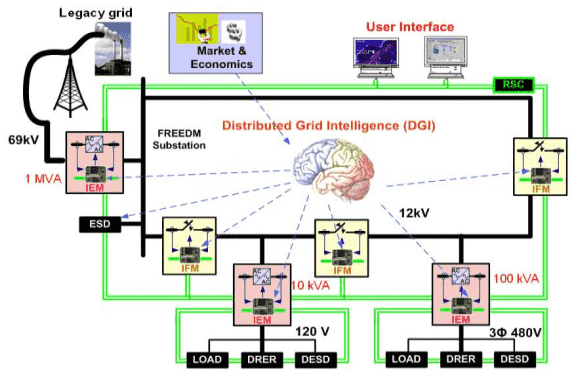
Рисунок 1 – РУВЭЭ топология и компоненты системы
Поколение реле максимального тока началось с обычных электромеханические реле с последующим статическим и цифровым реле. Последние два поколения предотвращают ошибки перерегулирования и уменьшают задержку. В настоящее время, микропроцессорные и микроконтроллерные реле вводятся в устранение их недостатков. Это приводит к увеличению мощности защиты системы; лучшая надежность, уменьшения влияния на оборудование системы электроснабжения и облегчения питание системы автоматизации. Микроконтроллеры работают с низким напряжением и токовые входы имеют хорошую стабильность к изменению тока. Они содержат RAM, ROM и другие периферийные устройства, в то время как микропроцессоры имеют только CPU [7]. В литературе микроконтроллер Arduino Uno был использован от перенапряжения и защиты от перегрузки по току простых однофазных систем в [8] и для защиты трансформатора в [7]. Дифференциальная защита трансформаторов была предложена использовать Arduino с GSM и голосовой схемой в [9]. Авторы рекомендовали использовать Arduino вместо 8051 микропроцессора, так как это недорогое устройство с очень высокой скоростью и высокой точностью. Защитная стратегия была применена с помощью контроллера Arduino для определения температуры и тока текущей и отключающей нагрузки при заданных значениях [10]. Дифференциальная защита была применена с использованием Arduino в [11-13]. Arduino чувствует состояние трансформаторов каждую секунду. Если он обнаружит какую-либо ошибку, то отправляет команды на автоматические выключатели для отключения основного напряжения трансформатора. Наконец, Arduino был использован для мониторинга и защиты двигателей от перенапряжения, перегрузки по току, перегрузки, чрезмерного нагрева, отклонения и пониженного напряжения [14]. Предложенное программное обеспечение было представлено и обновлено в режиме реального времени. Данные энергосистемы с использованием Arduino в [15]. Программное обеспечение использовалось для распознавания и указания различных типов состояний неисправности на основе предварительно установленных значений, а затем отключения стороны нагрузки.
В этой статье на основе микроконтроллера Arduino Uno реле максимального тока с различными характеристиками (инверсные, усиленно инверсные и крайне инверсные) предназначено для РУВЭЭ системы. Программный симулятор и аппаратная схема разработаны и внедрены. Разработанная практическая печатная плата оснащена необходимыми входами и выходами для системы РУВЭЭ. Дружественная
программа создана с использованием программного пакета Proteus и легко интегрируется в аппаратную карту. Различные сценарии применяются к симулятору для удовлетворения характеристик трех типов реле максимального тока и результаты сравниваются с характеристиками, записанные в соответствии со стандартом МЭК 60255-151 [16]. Обычно обратные характеристики реле проверяются и выполняется с использованием практической схемы.
2. Постановка задачи
Защита от перегрузки по току очень важна для защиты ветви, соединяющее ТТ с зонами замкнутого контура в системе РУВЭЭ, как показано на рис. 2. Распределительная шина может импортировать энергию из контура среднего напряжения в нагрузку рядом с локальной генерацией в случае, если мощность генерации меньше, чем подключенные нагрузки. Аналогично она может экспортировать энергию в контур среднего напряжения. В случае, если локальная мощность больше, чем подключенная нагрузка. Управление электрическими нагрузками активирует ИЦС (интеллектуальная цифровая сетка) блока РУВЭЭ. ТТ является всегда пи направлением для выполнения функции IEM. По этим причинам, в реле максимального тока должна быть установлена в связь между ТТ и циклом РУВЭЭ, как показано на рис. 2.
Рисунок 2 – Резервные блоки защиты
(анимация состоит из 8 кадров с задержкой 500 мс между кадрами, количество циклов воспроизведения – 3, размер – 32 килобайт)
Блок резервной защиты системы РУВЭЭ состоит из из трех основных схем защиты от перегрузки по току, повышенной/низкой схемы напряжения и дифференциальной защиты, как объяснено на рис. 2. В этой статье новый дизайн реле максимального тока с использованием микроконтроллера Arduino. Предлагаемая конструкция имеет очень низкую стоимость, высокую скорость и высокую точность. Используемый микроконтроллер Arduino достаточно эффективен и прост для программирования. Результаты, полученные из предложенного реле сравниваются со значениями, полученными со стандартными характеристическими кривыми МЭК в трех режимах операции (нормальный, усиленно инверсный, крайне инверсный) и показывают незначительность ошибок.
3. Предлагаемый метод
Схема защиты от сверхтоков предлагается согласно блок-схеме на рис. 3, а блок-схема на рис. 4. Аппаратный микроконтроллер Arduino используется для загрузки программного обеспечения, разработанного через пакет Proteus с использованием языка C. Программное обеспечение создано для удовлетворения различных характеристик реле максимального тока (инверсные, усиленно инверсные и крайне инверсные), которые необходимы для защиты системы РУВЭЭ. Следующие стандартные характеристики моделируются в программе согласно следующим уравнениям:
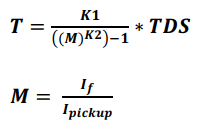
где
- T – время работы реле,
- IТ – значения тока повреждения,
- IY – текущее значение уставки,
- M – кратность тока,
- K1, K2 – параметры, связанные с набором кривых (инверсные, усиленно инверсные и крайне инверсные т.д.).
Значение тока, протекающего от питания к нагрузке, воспринимается трансформатором тока с эффектом Холла. Текущий сигнал преобразуется в постоянное напряжение с использованием резистивного шунта к микроконтроллеру. Произведенный сигнал напряжения, который пропорционален этому текущему значению, подается на микроконтроллер Arduino Uno. Сигнал напряжения варьируется в зависимости от фактического значения тока в главной цепи. Если значение тока превышает заданное значение, выходной сигнал генерируется для отключения твердотельного переключателя нагрузки и отображает ток неисправности на ЖК-дисплее.
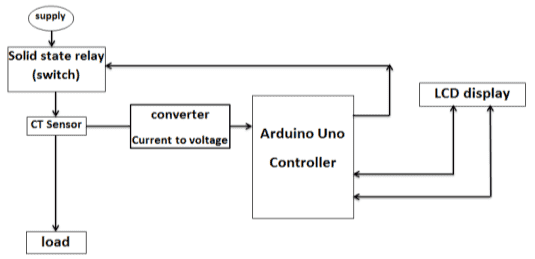
(а) структурная схема реле максимального тока
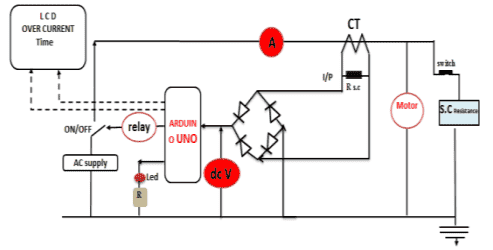
(b) принципиальная электрическая схема тока
Рисунок 3 – Предлагаемое реле максимального тока с использованием контроллера Arduino Uno
Процесс предлагаемой методики отображается как блок-схеме на рис. 4 и может быть обобщен следующим образом:
- Выберите значения K1, K2 в соответствии с требуемым режимом работы, отрегулировав сопротивление R1
- Выберите значение параметра Time Dial Setting TDS, используя переменное сопротивление R2
- Подайте короткое замыкание на нагрузку. Значение короткого замыкания изменяется при использовании переменного сопротивления параллельно нагрузке
- Рассчитайте множитель M, используя (2), и определите время работы, используя (1)
- Выведите характеристические кривые для разных режимов, используя соответствующие значения М и Т
- Сравните характеристические кривые для разных режимов со стандартными характеристиками IEC для определенных TDS
4. Конструкция цепи
Основные компоненты прототипа принципиальной схемы обозначены на рис. 5, которые можно резюмировать следующим образом:
- Arduino Uno микроконтроллер;
- Трансформатор тока с эффектом Холла ACS712;
- Твердотельное реле;
- ЖК.
4.1 Arduino Uno микроконтроллер
Это платформа с открытым исходным кодом, состоит из двух основных частей; первое – это физическая программируемая печатная плата, которая используется как микроконтроллер. А вторая часть представляет собой программное обеспечение, которое работает на персональном компьютере. Пакет Proteus используется для написания необходимой программы с использованием программного обеспечения C-кода и загрузки программного кода на физическую плату. Предлагаемые характеристики микроконтроллера приведены в Таблица 1, Рис. 6 и Таблица 2. Эти компоненты, которые полностью поддерживаются микроконтроллером, позволяют подключиться к компьютеру с кабелем USB или поставить его переменно/постоянный адаптер, чтобы приступить к работе.
| Элемент | Название | Номер |
|---|---|---|
| 1 | Arduino uno | 1 |
| 2 | Transformer 220/12 V | 1 |
| 3 | Rectifier | 1 |
| 4 | Relay 5 V | 1 |
| 5 | Potentiometer 1K | 2 |
| 6 | Potentiometer 5K | 2 |
| 7 | 10 KΩ Resistor | 2 |
| 8 | 9.2Ω Resistor | 1 |
| 9 | 2Ω Resistor | 1 |
| 10 | Push button | 3 |
| 11 | Capacitor 100 µF | 1 |
| 12 | Capacitor 100 µF | 1 |
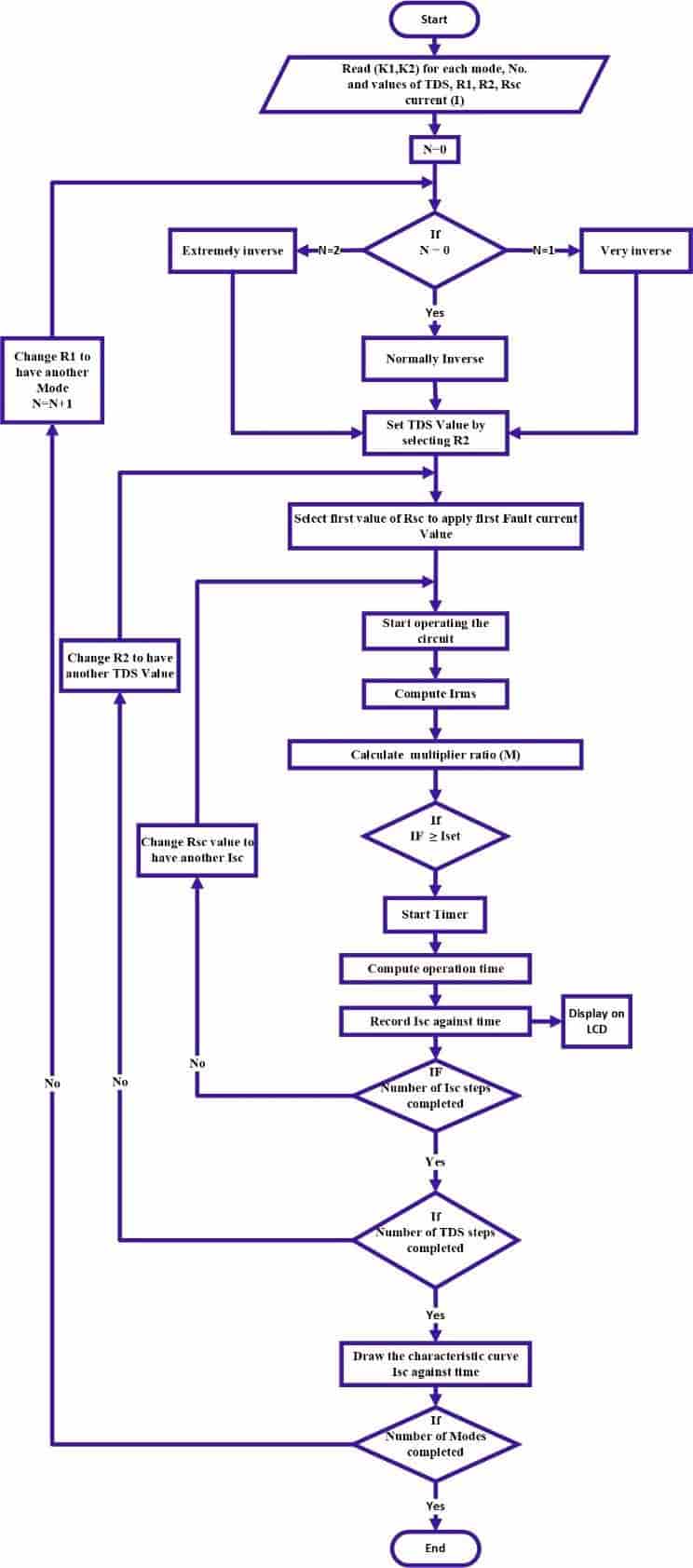
Рисунок 4 – Предлагаемое реле OC с использованием блок-схемы Arduino Uno

Рисунок 5 – Схема прототипа
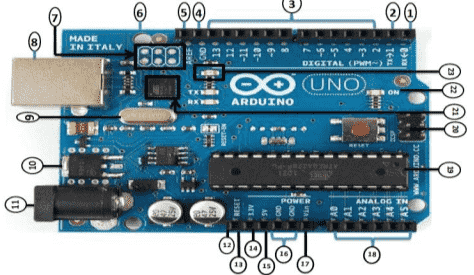
Рисунок 6 – Макет микроконтроллера Arduino
| Номер | Название | Описание |
|---|---|---|
| 1 | Serial output (TX) | |
| 2 | Serial input (RX) | |
| 3 | Digital input/output pins (2-13) | Входное / выходное напряжение на Arduino Uno Board, когда он использует внешний источник питания |
| 4 | GND | Штырь заземления для цифрового |
| 5 | AREF pin | Опорное напряжение для аналоговых входов. Используется с аналоговой ссылкой |
| 6 | Reset button | Переместите эту строку низко, чтобы сбросить микроконтроллер, и использовать для добавления сброса кнопка щитов, которые блокируют один на доска |
| 7 | ICSP for AT mega 16U2 | |
| 8 | USP plug | |
| 9 | AT mega 16U2 microcontroller | Память |
| 10 | Voltage Regulator | Отрегулируйте напряжение до 5 В |
| 11 | External power supply plug | |
| 12 | IOREF pin | Предоставляет источник опорного напряжения, с помощью которого микроконтроллер работает |
| 13 | Reset pin | Установите линию на низкий уровень, чтобы сбросить микроконтроллер |
| 14 | 3.3V pin | 3,3 В питание от платы регулятора. Максимальный ток на плате 50 мА |
| 15 | 5V pin | Выходы 5В на плате |
| 16 | GND | Штыри заземления для аналога |
| 17 | Voltage in pin | Пин VIN платы питания (7-12 В) питания напряжение через 5В или 3,3В |
| 18 | Analog inputs pins(0-5) | Прочитайте аналоговые данные |
| 19 | AT mega 328 microcontroller | Память 32 КВ |
| 20 | ICSP for AT mega 328 | |
| 21 | TX, RX Led | |
| 22 | Power LED indicator | |
| 23 | On-Board LED | |
| 24 | ICSP for AT mega 16U2 |
4.2 Трансформатор тока с эффектом Холла ACS712
Микропроцессоры, используемые для любой схемы защиты, включают датчики, которые считаются основным элементом. Датчики преобразовывают данные в реальном времени в цифровые переменные данные в порядке обработки микропроцессором. Датчик ACS 712 обеспечивает экономичное точное решение для переменного или постоянного тока в промышленных и коммуникационных системах, например, центр управления двигателем, режим переключения поставщиков питания, нагрузки системы обнаружения и защиты. Трансформатор тока ACS712, показанный на рис. 7, состоит из точного слабого эффекта линейной цепи датчика Холла с медной проводящей дорожкой, расположенной вблизи поверхности матрицы. Приложенный ток течет через этот медный проводящий путь, генерирует магнитное поле, которое воспринимается встроенным IC Холла и преобразуется в пропорциональное напряжение. Точное пропорциональное напряжение обеспечивается низким эффектом. После нагрузки выход КТ будет положительным всякий раз, когда увеличение тока в первичной медной проводимости (от выводов 1 и 2 до выводов 3 и 4) чувствительный путь тока
как видно на рис. 7.

(а) датчик тока – LK
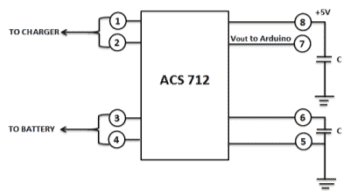
(b) Трансформатор тока с эффектом Холла ACS712
Рисунок 7 – Датчик тока и трансформатор тока с эффектом Холла ACS712
4.3 Твердотельное реле
Твердотельное реле (ТР) – это электронное устройство включения/выключения, которое запускается при подаче небольшого внешнего напряжения через свои контрольные терминалы. Оно состоит из датчика, который реагирует на соответствующий сигнал управления, быстрый и более точный, чем большинство механических реле. Могут переключаться на более низкое напряжение и имеют гораздо меньшую чувствительность к факторам хранения и рабочей среды. Таким как твердотельное электронное переключающее устройство, которое переключает питание цепи нагрузки и механизм соединения с включенным управляющим сигналом, чтобы активировать этот переключатель без механических частей. У ТР есть много преимуществ перед электромеханическими реле: механический удар, вибрация и внешние магнитные поля. В этом исследовании 5V-DC-2 канала релейный модуль для контроллера Arduino Uno используется и может управляться напрямую с 3,3 В или 5 В.
4.4 Жидкокристаллический дисплей (ЖК)
Это устройство является очень важным элементом в любой электронной цепи. Оно отображает значения переменных, необходимых для пользователя. ЖК-дисплей имеет 16 контактов, где самый левый – земля, а второй VCC подключен к 5 В на плату Arduino. На рис. 8 показаны другие контакты и их функции.

(а)

(b)
Рисунок 8 – Жидкокристаллический дисплей (LCD)
5. Предлагаемое моделирование цепи и результаты
Три сценария моделируются для инверсных, усиленно инверсных и крайне инверсных характеристик реле максимального тока при разных значения TDS.
5.1 Сценарий-1: моделирование нормального инверсного реле
Процедура, используемая для применения этого сценария, может быть собрана в следующие шаги:
- Выберите нормальное обратное реле максимального тока, используя режим кнопка, показанная на рис. 3 и рис. 9;
- Выберите TDS равным 0,05 с помощью кнопки TDS;
- Используйте разные значения переменного короткого замыкания сопротивление R4 для изменения тока повреждения IF;
- Получить разные значения как тока повреждения, так и время работы в соответствии со значениями R4;
- Рассчитайте значения множителей для выбранных значений;
- Нарисуйте предложенное нормальное обратное реле характеристик, как на рис. 10;
- Примените те же значения множителей к обычному обратному реле, указанных в МЭК 60255-151 и сравните его характеристиками относительно предложенной, как на рис. 10;
- Рассчитайте процентную ошибку для каждого значения, как в таблице 3.
Можно заметить, что предлагаемая крайне инверсная характеристика реле максимального тока практически совпадает со стандартом IEC, как показано на рисунке 10. Реализуются небольшие ошибки, как показано в таблице 3.
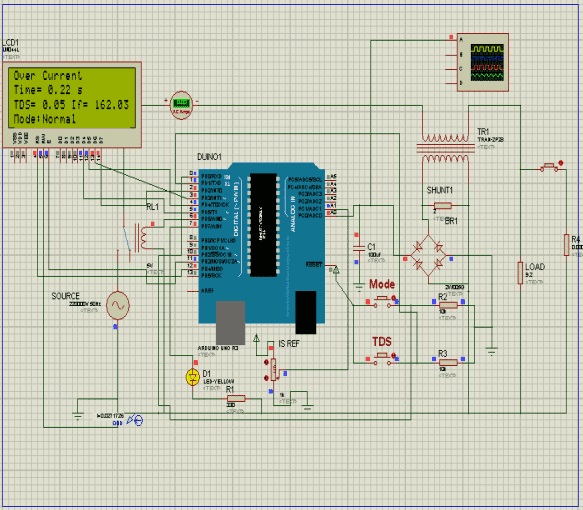
Рисунок 9 – Принципиальная схема для сценария 1 с TDS = 0,05
| If,(A) | 53 | 70 | 107 | 162 |
|---|---|---|---|---|
| Ipickup,(A) | 33 | 33 | 33 | 33 |
 |
1.61 | 2.21 | 3.24 | 4.91 |
| Время работы по Arduino,(c) | 0.71 | 0.46 | 0.29 | 0.22 |
| Время работы по IEC,(c) | 0.72 | 0.47 | 0.3 | 0.23 |
| Ошибка,(%) | 0.01 | 0.02 | 0.03 | 0.04 |
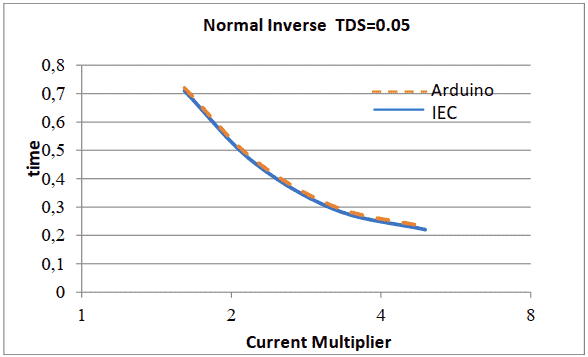
Рисунок 10 – Предлагаемая обратная характеристика реле максимального тока при TDS = 0,05 по сравнению со стандартом IEC с использованием симулятора
5.2 Сценарий-2: моделирование усиленно инверсного реле максимального тока
Второй режим усиленный
может быть получен изменением режима кнопкой. Типичная схема этого режима показана на рис. 11. Те же шаги, используемые в сценарии 1, повторяются и получаются усиленно инверсными. Значения характеристик реле максимального тока сведены в таблицу 4 и нарисованы на рис. 12. Процент ошибок для каждого короткого значения схемы рассчитано и сведено в таблицу 4. Следует отметить, что предложенная характеристика очень обратного реле максимального тока почти совпадает с характеристикой стандарта МЭК с очень маленькой ошибкой.
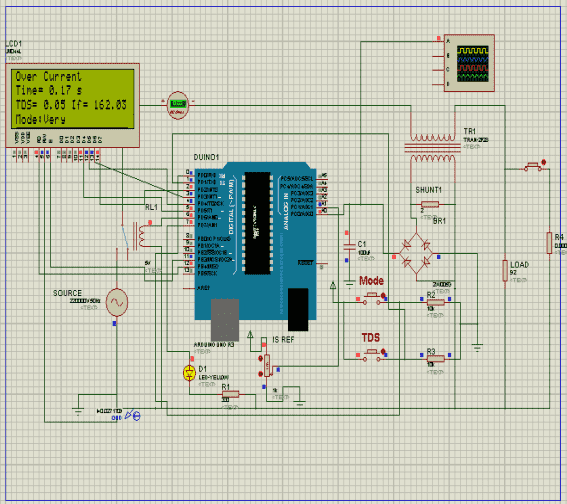
Рисунок 11 – Принципиальная схема для сценария 2 с TDS = 0,05
| If,(A) | 53 | 70 | 107 | 162 |
|---|---|---|---|---|
| Ipickup,(A) | 33 | 33 | 33 | 33 |
|
1.61 | 2.21 | 3.24 | 4.91 |
| Время работы по Arduino,(c) | 1 | 0.6 | 0.29 | 0.17 |
| Время работы по IEC,(c) | 1 | 0.6 | 0.3 | 0.17 |
| Ошибка,(%) | 0 | 0 | 0.03 | 0 |
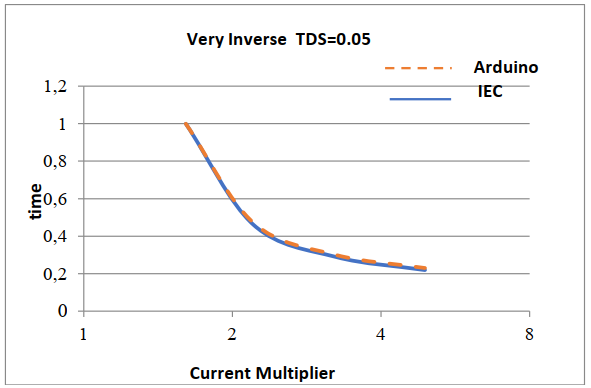
Рисунок 12 – Предлагаемая обратная характеристика реле максимального тока при TDS = 0,05 по сравнению со стандартом IEC с использованием симулятора
5.3 Сценарий-3: моделирование крайне инверсного реле максимального тока
Этот режим можно получить, выбрав третий режим «крайний инверс». Типичная принципиальная схема для этого режима показана на рис. 11. Аналогично двум вышеупомянутым сценариям, характерные значения вычисляются для крайне инверсного реле максимального тока, а также табулируются и рисуются. Из рис. 14 видно, что предложенная чрезвычайная характеристика обратного реле максимального тока также совпадает с характеристиками, полученных из стандарта МЭК с небольшими ошибками, приведенные в таблице 5.
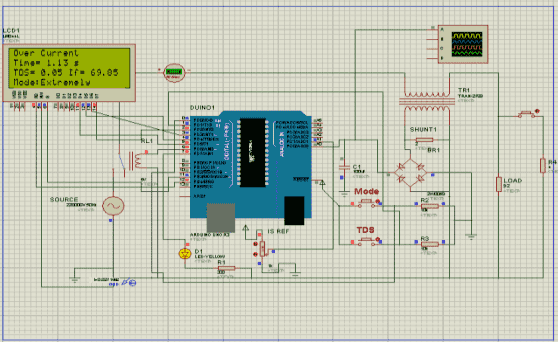
Рисунок 13 – Предлагаемая обратная характеристика реле максимального тока при TDS = 0,05 по сравнению со стандартом IEC с использованием симулятора
| If,(A) | 162 | 107 | 70 | 53 |
|---|---|---|---|---|
| Ipickup,(A) | 33 | 33 | 33 | 33 |
|
4.91 | 3.24 | 2.21 | 1.61 |
| Время работы по Arduino,(c) | 0.17 | 0.42 | 1.13 | 2.42 |
| Время работы по IEC,(c) | 0.18 | 0.43 | 1.13 | 2.42 |
| Ошибка,(%) | 0.05 | 0.02 | 0 | 0 |
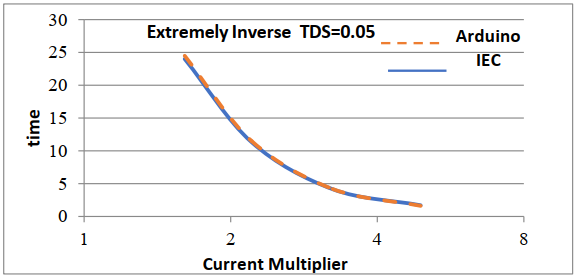
Рисунок 14 – Предложена крайне обратная характеристика реле максимального тока при TDS = 0,05 по сравнению со стандартом IEC с использованием симулятора
6. Внедрение практической цепи
Практическая схема реализации предложенного реле максимального тока с использованием контроллера Arduino Uno показана на Рис. 5. Для нормально-обратного реле максимального тока с TDS = 1, в схеме используется коэффициент ТТ 500/1, сопротивление шунта R1
(0-8,0 Ом) и двигатель с током полной нагрузки 1,05 А.
Ток, воспринимаемый трансформатором тока с эффектом Холла, будет производить напряжение на шунтирующем сопротивлении, которое преобразовано в постоянное напряжение и подается на Arduino Uno. Это напряжение находится в пределах 5 В, чтобы соответствовать типу контроллера. По логике, которая была запрограммирована на Arduino Uno, измеренный ток сравнивается с заданными значениями в контроллере. Если ток больше установленного значения отключения (1,5 при полной нагрузке = 1,5*1,05 = 1,575 А), сигнал отключения генерируется и твердотельное реле срабатывает как цепь выключателя и размыкает цепь. Время отключения тока повреждения появляется на ЖК-дисплее. Уровень неисправности изменяется путем регулировки разных значений R2 и соответствующие времена срабатывания записаны. Результаты представлены на рис. 15. и в таблице VI. Можно заметить, что никакого изменения не происходит для практической схемы при нагрузке менее 150% что совпадает со стандартом IEC. Кроме того, практическая производительность схемы почти такая же, как в стандарте IEC когда уровень неисправности увеличивается с очень небольшим процентом ошибки, как указано в таблице VI. Где IL – ток нагрузки (A), IS – ток вторичной обмотки ТТ (мА), Vard – это среднеквадратичное напряжение Arduino, TIEC – время работы согласно IEC (с), Tm – фактическое измеренное время (с).
| IL | IS | M | Vard | TIEC | Tm | Ошибка,(%) | Путь |
|---|---|---|---|---|---|---|---|
| 1.05 | 2.10 | 1.333 | 0.740 | - | - | - | No |
| 2.00 | 4.00 | 2.539 | 0.84 | 11.6 | 12 | 3.4 | Yes |
| 2.10 | 4.20 | 2.667 | 0.787 | 11 | 11.4 | 3.6 | Yes |
| 2.50 | 5.00 | 3.175 | 0.925 | 7 | 7.2 | 2.9 | Yes |
| 4.01 | 8.00 | 5.079 | 3.4 | 1.9 | 1.7 | -10.5 | Yes |

Рисунок 15 – Предлагаемая обратная характеристика реле максимального тока при TDS = 0,05 по сравнению со стандартом IEC с использованием практической схемы
Заключение
Реле максимального тока было разработано с использованием микроконтроллера Arduino Uno. Программное обеспечение было создано через пакет Proteus с использованием языка С. Для обеспечения возможности предлагаемых характеристик реле защиты от сверхтоков до ветки системы РУВЭЭ, программный симулятор и плата, была разработана схема изделия. Программный симулятор был сформирован для имитации нормальной инверсной, усиленно инверсной и крайне инверсной характеристик. Аппаратная схема была изготовлена с использованием платы микроконтроллера Arduino, загружена вместе с созданной программой и снабжена входами и выходами для контроля и защиты нагрузки двигателя. Три типа реле максимального тока были применены к программному обеспечению симулятора и по сравнению со стандартом IEC 60255-151. Предлагаемые характеристики реле практически совпадают со стандартными. Ошибка найдена между 1 и 4% для нормально инверсного и, 3% для усиленно инверсного и от 2 до 5% для крайне инверсного реле. Обратные характеристики были проверены с использованием практической схемы. Ошибки были найдены от 3,4% до -10,5% по сравнению со стандартом IEC 60255-151.
Список источников
- A. Huang,
FREEDM System - A Vision for the Future Grid
, IEEE Power and Energy Society General Meeting, Providence, USA, 25-29 July 2010, pp.1-4 - N. Sharma,
Novel Directional Protection Scheme for the FREEDM Smart Grid System
, M. Sc. Thesis submitted to Arizona State University, August 2015 - Электронный ресурс: https://www.freedm.ncsu.edu/
- P. Mandava,
Design and Development of Protection Schemes for FREEDM Smart Grid Systems
, M. Sc. Thesis submitted to Arizona State University, December 2014 - O. Vodyakho, et.al.,
Solid-State Fault Isolation Devices: Application to Future Power Electronics-Based Distribution Systems
, IET Electric Power Application, Vol. 5, Issue 6, July 2011, pp. 521–528 - M. F. Kotb, M. El‐Saadawi, E. H. El‐Desouky,
Protection Coordination Optimization for Future Renewable Electric Energy Delivery and Management (FREEDM) System
, Journal of Electrical Engineering JEE, USA, 6(2018), pp. 161-176 - A. Agarwal,
Overcurrent Protection of Transformer by incorporating IDMT Function with the Help of Arduino Uno Microcontroller
, International Research Journal of Engineering and Technology (IRJET) Vol.: 03, Issue: 05, May-2016, pp. 1753-1755 - S. Bhattacharya, et al.
A Novel Approach to Overvoltage and Overcurrent Protection of Simple Single Phase Two Terminal Arduino Uno
, International Journal of Electrical Engineering, Volume 10, Number 1, 2017, pp. 97-110 - K. B. Trivedi, C. Vibhkar, R. Sardhara,
Differential Protection of Transformer Using Arduino with GSM and Voice Circuit
, International Journal of Novel Research and Development (IJNRD) Volume 2, Issue 4 April 2017, pp.95-100 - R. B. Pandhare, et. al.
Transformer Protection by Using Arduino with GSM Modem
, International Journal of Research in Advent Technology (IJRAT), Special Issue National ConferenceCONVERGENCE 2017
, 09th April 2017, pp. 119-123 - I. Sharma, T. Patel, D. Tailor,
Differential Protection of Transformer Using Arduino
, International Journal of Innovative and Emerging Research in Engineering Volume 3, Issue 7, 2016 - S. N. Syed, S. Radhika, M. N. S. Rani,
Differential Current Protection of Transformer Using Arduino with Voice Alert
, International Journal of Innovations in Engineering and Technology (IJIET), Volume 6 Issue 2 December 2015 pp. 206-212 - A. Naseem, N. Alam,
Protection of Distribution Transformer Using Arduino Platform
, Science International, Volume: 27, Issue: 1, 2015, pp. 403-406 - R. Waswani, A. Pawar, M. Deore, R. Patel,
Induction Motor Fault Detection, Protection and Speed Control Using Arduino
, International Conference on Innovations in Information, Embedded and Communication Systems (ICIIECS), Coimbatore, India, 17-18 March 2017 - A. Verma, S. L. Shimi,
Arduino Based Low Cost Power Protection System
International Journal of Advance Research, Ideas and Innovations in Technology (IJARIIT), Volume: 2, Issue: 4, 2012, pp. 1-7 - IEC 60255-151:
Measuring Relays and Protection Equipment–Part 151: Functional Requirements for Over/Under Current Protection
, International Electrotechnical Commission, 2009