Интеллектуальное управление робототехническими системами в условиях неопределенности
Автор: И.А. Щербатов
Источник: Вестник АГТУ. Сер: Управление, вычислительная техника и информатика. - 2011 / И.А. Щербатов с. 73-77.
Аннотация
Щербатов И.А. Исследование автоколебаний при моделировании гармонического осциллятора с использованием комплексов моделирования. Была синтезирована архитектура интеллектуальной системы управления робототехническими системами, инвариантную по отношению к специфике функционирования.
Введение
Интеллектуальное управление - применение методов искусственного интеллекта для управления объектами различной физической природы. В области управления робототехническими системами методы искусственного интеллекта находят наиболее широкое применение. Это обусловлено, прежде всего, автономностью роботов и необходимостью решения ими неформализованных творческих задач в условиях неполноты информации и различных видов неопределенности.
Указанный класс задач до недавнего времени оставался прерогативой естественного интеллекта: оператора объекта управления, инженера, ученого, т. е. человека. Современные достижения в области теории автоматического управления, интеллектуальных методов формализации слабоструктурированных задач и управления сложными техническими системами позволяют реализовать очень сложные робототехнические системы, к которым относятся мобильные роботизированные платформы, гибкие автоматизированные линии и андроидные роботы.
Робототехнические системы функционируют в условиях неполноты входной информации, когда принципиальная невозможность измерения ряда параметров накладывает существенные ограничения на программу управления. Это приводит к необходимости разработки базы алгоритмов, позволяющих на основе косвенных признаков и измеряемых показателей рассчитать неизмеряемые параметры.
Неопределенность внешней среды, в которой функционирует робототехническая система, заставляет включать в состав системы управления различного рода компенсаторы, модули адаптации, накопления и ранжирования информации.
Постановка задачи
Целью исследований являлось формирование подходов к построению интеллектуальных систем управления робототехническими системами, инвариантных по отношению к специфике функционирования, учитывающих неполноту входной информации и различные виды неопределенности.
Для достижения поставленной цели требуется решить ряд взаимосвязанных задач: про-вести анализ архитектур интеллектуальных систем управления робототехническими системами; разработать обобщенный алгоритм ситуационной идентификации робототехнической системы; разработать обобщенную схему системы управления робототехнической системой; разработать интеллектуальные системы управления манипуляционным роботом, мобильной роботизированной платформой и гибкой автоматизированной линией.
Методы исследования
В ходе исследований использовались методы общей теории автоматического управления, теории нечетких множеств, нейронных сетей, системного анализа, теории экспертных оценок.
Местоположение робототехнической системы во внешней среде
Для реализации интеллектуальных алгоритмов управления первоочередной является задача текущей идентификации ситуации, в которой находится робототехническая система. Для решения этой задачи разработана структурная схема системы ситуационной идентификации (рис. 1).
Блок технического зрения и сенсорного очувствления предназначен для определения изменений состояния внешней среды и представления сенсорной карты среды для дальнейшей обработки. Сенсорная карта среды – это образ ситуации, в которой находится робот в текущий момент времени. Интервал времени построения сенсорной карты выбирается исходя из специфики предметной области.
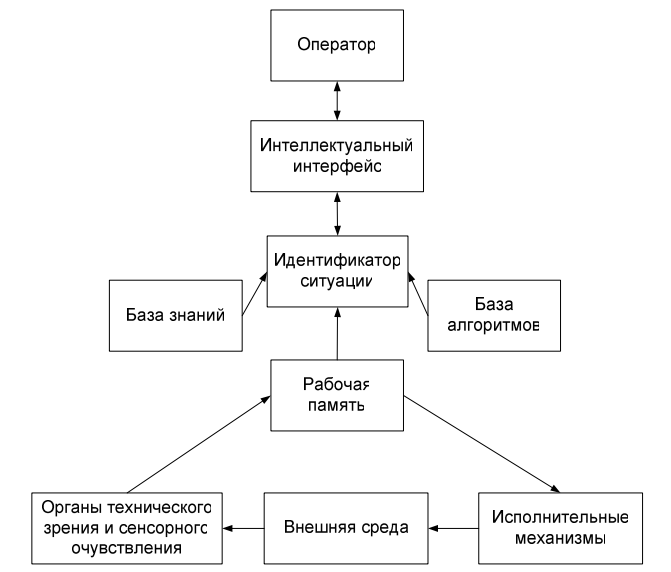
Рисунок 1 – Структурная схема системы ситуационной идентификации
Рабочая память, по аналогии с экспертными системами, предназначена для обработки информации, поступающей от сенсоров и обрабатываемой с помощью имеющейся базы алгоритмов и базы знаний (БЗ) робототехнической системы.
База алгоритмов включает в себя алгоритмы предобработки сенсорной карты (цифровая обработка сигнала, распознавание звуковых образов и изображений), вычисления неизмеряемых параметров (функциональные зависимости от измеряемых параметров), восстановления полноты информации (проверка знаний на полноту и противоречивость, адаптация знаний с учетом нестационарности и вариативных внешних условий), математические операции и пр.
База знаний представляет собой сложную иерархическую структуру, содержащую априорную информацию о внешней среде, закладываемую на этапе обучения, полные и непротиворечивые знания, приобретаемые роботом в процессе функционирования и восприятия внешней среды. Знания в БЗ ранжируются по признакам релевантности и обновляются с учетом изменения специфики функционирования робота на основании алгоритмов адаптации знаний.
Наиболее важный блок - идентификатор ситуации. Именно этот блок отвечает за правильное распознавание образа ситуации на основе сенсорной карты. Результатная информация этого блока является определяющей для выбора программы управления робототехнической системой.
И наконец, интеллектуальный интерфейс, который необходим для связи с оператором. Оператор осуществляет контроль функционирования робототехнической системы, а также мониторинг процесса по достижению поставленных целей. Как правило, общение робота с оператором должно происходить с использованием естественно-языкового интерфейса на ограниченном подмножестве естественного языка.
Структура системы управления робототехнической системой в условиях неопреде-ленности
Реализация алгоритмов и программ интеллектуального управления робототехническими системами в условиях неопределенности сопряжена с рядом значительных трудностей.
Сложность алгоритмов предварительной обработки входной информации и структурная неопределенность модели поведения самой робототехнической системы обусловливают избыточность структуры системы интеллектуального управления.
Для решения задачи управления роботом в условиях неопределенности спроектирована следующая архитектура системы интеллектуального управления (рис. 2).
Система ситуационной идентификации (ССИ) должна входить в состав любой интеллектуальной системы управления робототехнической системой. Интеллектуальное устройство управления (ИУУ) содержит в своем составе БЗ и блок выбора программы управления (БВПУ). Назначение этого блока - выработка управляющего воздействия для системы электроприводов (ЭП), воздействующих на механическую систему (МС) робота.
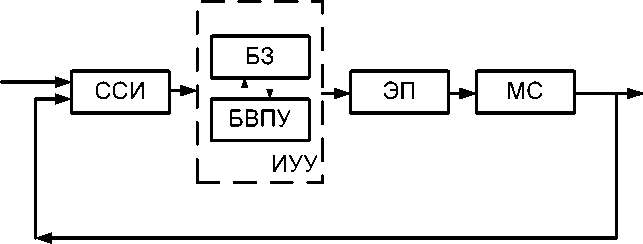
Рисунок 2 – Структурная схема системы интеллектуального управления робототехнической системой
Системы управления промышленными манипуляторами
Традиционные системы управления промышленными манипуляторами делятся на несколько классов. Первый класс систем – системы программного управления.
Система непрерывного управления рабочим органом манипулятора подразумевает подравнивание манипулятора под эталонную модель [1]. В таком алгоритме управления не учитываются потери в МС манипулятора и принимается, что все усилия, развиваемые приводами, передаются на рабочий орган.
Система программного управления силой в рабочем органе применяется для управления не только по вектору силы, но и по вектору положения рабочего органа. Система независимого управления перемещением и усилием в рабочем органе манипулятора по различным степеням подвижности имеет два контура управления с обратной связью: по положению и по силе [2].
В системе связанного управления перемещением и усилием в рабочем органе манипулятора задание по вектору положения рабочего органа корректируется по текущему значению вектора силы. Это означает, что при движении рабочего органа величина его хода корректируется по силе воздействия на внешнюю среду.
Адаптивные системы управления применяются, когда выполняются: операции взятия произвольно расположенного или перемещающегося объекта, дуговая сварка швов с варьируемым положением, обход подвижных и непредвиденных препятствий. Для этой цели применяются адаптивные системы с ассоциативной памятью.
Для управления промышленными манипуляторами применяются также робастные системы управления, которые в настоящее время находят широкое практическое применение [3].
Реализация интеллектуального управления
Проблема функционирования робототехнической системы в условиях неопределенности является многоаспектной.
Рассмотрим задачу планирования поведения робототехнической системы в условиях неопределенности. Для ее решения наиболее целесообразно применение технологии динамических экспертных систем. База знаний такой экспертной системы корректируется с течением времени. Если применяется продукционная база правил, то состав продукционных правил непрерывно исследуется на предмет полноты и непротиворечивости [4]. Кроме того, за счет адаптационных алгоритмов осуществляется обновление и вытеснение устаревших и утративших свою актуальность правил. При этом вопросам обучения экспертной системы без учителя (самообучению) уделяется особое внимание ввиду того, что наблюдение за системой высококвалифицированного специалиста экономически нецелесообразно.
Блок самообучения или самонастройки БЗ экспертной системы требует тщательной проработки на этапе проектирования интеллектуальной системы управления робототехнической системой. Именно от качества выполнения этого этапа проектных работ зависит зачастую эффективность решения поставленной задачи. Он должен включать в себя подсистемы оценки полноты и противоречивости знаний, оценки качества управления и коррекции знаний.
Хронологически следующим этапом после планирования поведения может выступать проблема выдачи команд управления робототехнической системе на естественном языке. Для создания естественно-языкового интерфейса, по нашему мнению, наиболее подходящим инструментом реализации является теория нечетких множеств.
С помощью лингвистических переменных, содержащих определенное, заранее описанное терм-множество, производится описание предметной области, ограниченной системы команд и объектов, оказывающих воздействие на робототехническую систему и изменяющихся под ее действием. Используемые при этом методы фазификации и дефазификации, а также алгоритмы нечеткого логического вывода оказывают существенное влияние на точность отработки управляющих воздействий и скорость работы робототехнической системы.
И наконец, применение нейросетевых систем управления робототехническими системами. Основным преимуществом нейронной сети является отсутствие необходимости знать или создавать математическую модель объекта, поскольку нейронная сеть является универсальным нечетким аппроксиматором.
Объект (робототехническая система) выступает в роли «черного ящика». Нейронная сеть может выступать в качестве эталонной модели управляемой робототехнической системы. Следует отметить, что это должна быть обучающаяся многослойная нейронная сеть (идентификатор объекта). Нейросетевая модель настраивается на объект управления по рассогласованию выходных сигналов объекта и модели. Она же формирует обучающую выборку для подстройки и корректировки устройства управления в соответствии с выбранным критерием качества.
Заключение
Проведенный анализ позволил синтезировать архитектуру интеллектуальной системы управления робототехническими системами, инвариантную по отношению к специфике функционирования. Разработанный алгоритм ситуационной идентификации позволяет строить высокоинформативные сенсорные карты внешней среды. Описаны основные подходы к формированию интеллектуальных систем управления робототехническими системами. Показаны направления перспективного развития наиболее эффективных методов искусственного интеллекта, применяемых для реализации управляющих устройств.
Список использованной литературы
1. 1. Юревич Е.И. Основы робототехники. – СПб.: БХВ-Петербург, 2007. – 416 с.
2. Манипуляционные системы роботов / под ред. А.И. Корендясева. - М.: Машиностроение, 1989. - 472 с.
3. Бурдаков С.Ф. Синтез робастных регуляторов с упругими элементами: сб. науч. тр. - № 443. Механика и процессы управления. - СПб.: СПбГТУ, 1992.
4. Проталинский О.М. Применение методов искусственного интеллекта при автоматизации технологи-ческих процессов: моногр. - Астрахань: Изд-во АГТУ, 2004. - 184 с.