

Реферат за темою
випускної роботи
Зміст
Вступ
1. Актуальність теми
2. Мета і завдання дослідження
3. Огляд існуючих розробок
3.1 Класифікація технічних засобів
3.2 Основні принципи побудови систем
4. Поточні результати роботи
Висновки
Література
Вступ
Під час реалізації заходів з організації дорожнього руху особлива роль належить впровадженню технічних засобів: дорожніх знаків і дорожньої розмітки, засобів світлофорного регулювання, дорожніх огорож і напрямних пристроїв.
Світлофорне регулювання при цьому є одним із основних засобів забезпечення безпеки руху на перехрестях. Кількість перехресть, обладнаних світлофорами, в найбільших містах світу з високим рівнем автомобілізації безперервно зростає і досягає в деяких випадках співвідношення: один світлофорний об'єкт на 1,5–2 тис. жителів міста.
Дорожній рух є складною системою, що швидко змінюється в часі. Така динамічна система являє собою сукупність взаємин між рухомими і нерухомими засобами, що керуються людьми, і пішохідними потоками. Кожен об'єкт системи переслідує свої певні цілі при русі по дорозі і прагне виконати їх з мінімальною втратою часу і з достатнім ступенем безпеки.
Сутність регулювання полягає у вимозі, забороні та рекомендації водіям і пішоходам тих чи інших дій в інтересах забезпечення швидкості і безпеки. Воно здійснюється застосуванням „Правил дорожнього руху“ та комплексу технічних засобів, розпорядчими діями інспекторів дорожньої служби.
Технічні засоби організації руху за їх призначенням можна розділити на дві великі групи. До першої відносяться технічні засоби, що безпосередньо впливають на транспортні та пішохідні потоки з метою формування їх необхідних параметрів. Це — дорожні знаки, дорожня розмітка, світлофори і напрямні пристрої.
До другої групи належать засоби, що забезпечують роботу засобів першої групи за заданим алгоритмом. Це — дорожні контролери, детектори транспорту, засоби обробки і передачі інформації, обладнання керуючих пунктів автоматизованої системи управління дорожнім рухом.
1. Актуальність теми
Зростання автомобільного парку та обсягу перевезень веде до збільшення інтенсивності руху, що в умовах міст з історично сформованою забудовою призводить до виникнення транспортної проблеми. Так збільшуються транспортні затримки, утворюються черги і затори, що викликає зниження швидкості сполучення, невиправдану перевитрату палива і підвищене зношування вузлів і агрегатів транспортних засобів. Поліпшити ситуацію дозволить комплекс заходів, пов'язаних з удосконаленням управління транспортними потоками в місті — впровадженням комп'ютеризованих автоматичних систем управління дорожнім рухом на вулично-дорожній мережі міст.
Безпека дорожнього руху та ефективність управління транспортними і пішохідними потоками значною мірою визначаються якістю організації дорожнього руху, надійністю і відмовостійкістю програмно-технічних засобів систем управління дорожнім рухом. Тому розробка принципів організації дорожнього руху і систем управління транспортними потоками, необхідність використання сучасних технологій зв'язку та управління є досить актуальною проблемою в даний час.
2. Мета і завдання дослідження
Метою дослідження є підвищення ефективності організації безпечного дорожнього руху, мінімізація заторів, скорочення витрат палива і викидів вихлопних газів в навколишнє середовище, а також формування статистики за параметрами транспортних потоків шляхом розробки інтелектуальної системи управління дорожнім рухом.
Завдання дослідження — розробити систему інтелектуального управління світлофорними об'єктами, здатну працювати як в автоматичному, так і в ручному режимі з фіксованою і зі змінною тривалістю фаз, збирати інформацію про дорожню ситуацію і відображати її в зручному для сприйняття вигляді. Комплекс технічних засобів системи повинен бути достатнім для виконання всіх автоматизованих функцій САУ.
3. Огляд існуючих розробок
3.1 Класифікація технічних засобів
Дорожні контролери (ДК) для локального управління дорожнім рухом здійснюють перемикання світлофорної сигналізації тільки з урахуванням місцевих умов руху, існуючих на керованому перехресті. Обмін інформацією з пристроями керуючих пунктів в даних контролерах не передбачений.
Пристрої даного класу поділяються на наступні типи:
– ДК з викличними пристроями, що здійснюють перемикання світлофорних сигналів за викликом пішоходами. Призначені для управління дорожнім рухом на пішохідних переходах транспортних магістралей або перехрестях з малою інтенсивністю руху транспорту у напрямку, що перетинає магістралі. До цих пристроїв відносяться контролери ДКС з ТВП;
– ДК з фіксованими тривалостями фаз, що здійснюють перемикання світлофорних сигналів по одній або декільком заздалегідь заданим часовим програмам і призначені для управління дорожнім рухом на перетинах вулиць з інтенсивністю руху транспортних засобів, що мало змінюється протягом дня. До пристроїв даного типу відносяться модифікації контролерів ДКС, ДКП та ін.;
– ДК зі змінною тривалістю фаз, що здійснюють перемикання світлофорних сигналів в залежності від параметрів транспортного потоку і призначені для управління дорожнім рухом на перетинах вулиць, на яких інтенсивність руху транспорту часто змінюється протягом доби. До пристроїв даного типу відносяться контролери ДКМ4-4.
Дорожні контролери для АСУД здійснюють перемикання світлофорних сигналів в залежності від керуючих впливів УП. Ця група включає наступні типи:
– програмні контролери, що здійснюють перемикання світлофорної сигналізації по одній з декількох заздалегідь заданих тимчасових програм. Всі дорожні контролери підключені до магістрального каналу зв'язку, а ініціатором початкового моменту включення програми є пристрої керуючого пункту, таймер або безпосередньо один з контролерів. До пристроїв даного типу відносяться модифікації ДКС;
– контролери безпосереднього підпорядкування, що здійснюють перемикання світлофорної сигналізації за командами з керуючого пункту. Кожен з контролерів пов'язаний з керуючим пунктом окремою лінією зв'язку, якою отримує керуючі впливи і сигналізує про режим функціонування і стан світлофорного об'єкта. У ряді контролерів закладена можливість корекції керуючих впливів в залежності від реальної ситуації, що склалася в даний момент часу на перехресті. До контролерів безпосереднього підпорядкування відносяться модифікації ДКС, ДКП, КДУ та ін.
Під час проектування систем на базі вищерозглянутих контролерів в основному використовується дворівнева архітектура типу „клієнт-сервер“, де в якості клієнтів виступають дорожні контролери, а центральний сервер забезпечує централізоване управління дорожнім рухом на базі центрального керуючого пункту (ЦКП), координуючи роботу ДК і приймаючи інформацію про його стан для відображення диспетчеру.
Така структура має ряд недоліків, серед яких основним є перехід на локальне управління всіх світлофорних об'єктів у разі відмови сервера або іншого компонента ЦКП.
У сучасних АСУД інформація про поточні характеристики транспортних потоків збирається за допомогою детекторів транспорту.
За принципом дії Детектори транспорту поділяються на наступні:
– індуктивний;
– ферозондовий;
– ультразвуковий;
– інфрачервоний.
Індуктивні і ферозондові ДТ широко застосовувалися в 1980-90-х роках, проте їх монтаж пов'язаний з серйозними будівельними роботами, а термін служби, як правило, становить не більше одного року.
Ультразвукові детектори мали дуже обмежене, в основному експериментальне застосування.
В даний час найбільшого поширення набули інфрачервоні ДТ (ДТ-ІК). Це обумовлено відсутністю будівельних робіт при їх монтажі і тривалим терміном служби (до 8 років).
За принципом дії детектори транспорту поділяються на наступні типи:
– детектори прохідні, які видають сигнал при появі транспортної одиниці в контрольованій зоні, причому параметри сигналу не залежать від часу знаходження і напрямку руху транспортних одиниць. До таких детекторів відноситься ДТ-ІК;
– детектори присутності, що забезпечують видачу сигналу протягом усього часу знаходження транспортних одиниць в контрольованій зоні. До них відноситься ДТ-ІК-П;
– детектори швидкості, що забезпечують видачу сигналу протягом часу проходження транспортних одиниць між зонами дії двох детекторів, встановлених на одній смузі руху при фіксованій відстані між ними. До таких детекторів відноситься ДТ-ІК-С;
– детектори складу потоку, які формують сигнали проходження транспортних одиниць з поділом їх за типами автомобілів. До них відноситься ДТ-ІК-СП;
– пристрої для отримання статистичних даних про транспортні потоки, які забезпечують оперативний підрахунок кількості транспортних одиниць з роздільною фіксацією результатів підрахунку для заданого періоду часу поза системами. До таких ДТ відноситься пристрій накопичення інформації за транспортними потоками (УНІТП).
3.2 Основні принципи побудови систем
Відповідно до загальноприйнятої класифікації структур АСУД по області застосування і складності функціонування є три рівні систем.
Перший рівень систем присутній на будь-якому регульованому перехресті зі світлофорною сигналізацією, що функціонує в локальному режимі.
Другий рівень систем являє собою групу регульованих перехресть (як правило, до шістнадцяти ДК на одній магістралі), що функціонують в узгодженому один з одним режимі. Узгоджений режим може забезпечуватися засобами радіозв'язку, або магістральним каналом з пристроями узгодження ДК, або по радіальних каналах зв'язку з використанням контролера зонального центру (КЗЦ). Прикладами систем другого рівня є системи на базі контролерів ДКМ2С-4 із засобів АСС-УД, а також системи із застосуванням КЗЦ із засобів КТС „Сигнал“.
Третій рівень систем має ЦУП з мережею ПЕОМ, виділені канали зв'язку і необмежену безліч дорожніх контролерів.
Будь-який ДК дозволяє підключати до нього табло виклику пішохідне (ТВП) і управляти світлофорними об'єктами (СО). На одну лінію зв'язку можна підключати ДК і ДП. Крім того, по комутованих каналах зв'язку можна передавати інформацію з ЦУПа в ДПС.
4. Поточні результати роботи
Для реалізації САУ, що розроблюється, з урахуванням сформульованих функцій контролю і управління пропонується структурна схема системи світлофорного регулювання, яка наведена на малюнку 4.1.
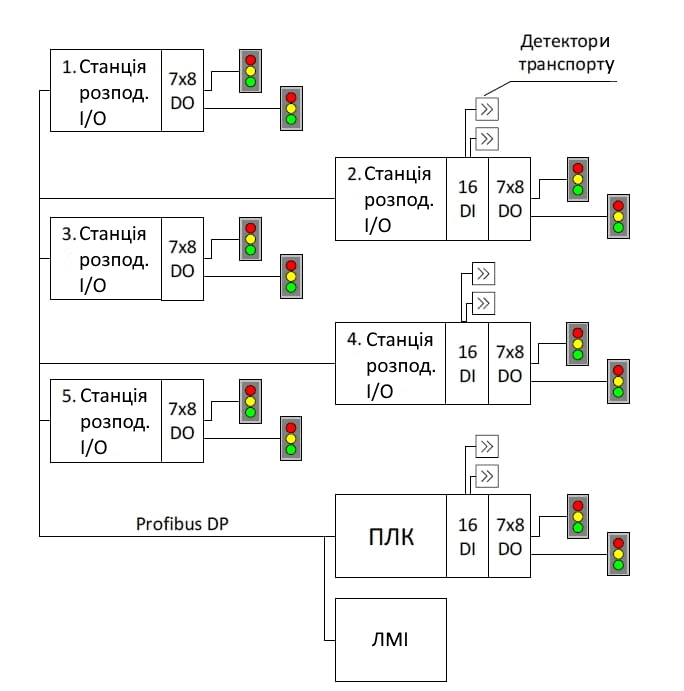
Малюнок 4.1 — Структурна схема САУ
Управління в системі здійснюється за допомогою програмованого логічного контролера (ПЛК). Так як датчики і виконавчі механізми рознесені в просторі, для збору вхідних і передачі вихідних сигналів використовується 5 станцій розподіленого введення-виведення. Загальна довжина системи в такому випадку не повинна перевищувати 10 км. Максимальна довжина зв'язків між станцією розподіленого введення-виведення і датчиками з виконавчими механізмами становить 600 м.
На кожній станції розподіленого введення-виведення, а також на ПЛК передбачається встановлення 7-ми модулів виведення дискретних сигналів для підключення виконавчих механізмів у вигляді ламп світлофорів, а на станціях 2, 4 і ПЛК — також модулі введення дискретних сигналів для підключення детекторів транспорту.
До ПЛК передбачається підключення людино-машинного інтерфейсу для ручного управління і відображення поточного стану системи.
Для технічної реалізації системи світлофорного регулювання пропонується використовувати обладнання виробництва компанії SIEMENS. Нижче наведено список елементів, присутніх у системі:
1. Блок живлення PS 307;
2. Центральний процесор CPU 313C-2 DP;
3. Модуль виведення дискретних сигналів SM 322
4. Модуль введення дискретних сигналів SM 321 (8x1 входів);
5. Інтерфейсний модуль для підключення станції ET 200M до мережі PROFIBUS DP з електричними (RS-485) каналами зв'язку;
6. Станція розподіленого вводу-виводу ET 200M;
7. Модуль людино-машинного інтерфейсу — панель оператора OP177B PN/DP.
На попередньому етапі досліджень був розроблений лабораторний стенд системи управління дорожнім рухом з метою організації лабораторних робіт з вивчення програмованих логічних контролерів, а також створення можливостей щодо вирішення завдань оптимізації дорожнього регулювання. Дану розробку планується використовувати для тестування нових методів дорожнього регулювання і демонстрації їх роботи. Лабораторний стенд охоплює різні варіанти управління рухом і може використовуватися з контролерами різних моделей і виробників. Загальний вигляд стенду і розташованих на ньому світлофорних об'єктів представлений на малюнках 4.2, 4.3.
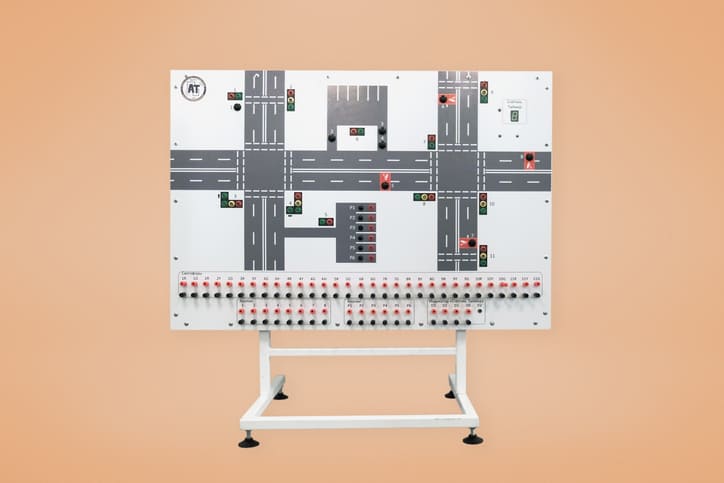
Малюнок 4.2 — Лабораторний стенд

Малюнок 4.3 — Світлофорні об'єкти на стенді
(анімація: 7 кадрів, 149 КБ)
Комплекс, реалізований на стенді, обслуговує два перехрестя і дві парковки.
Перше перехрестя (ліворуч) обладнане двома світлофорами з поворотними стрілками, а також пішохідним переходом з натискним світлофором і пов'язаним з ним світлофором для автомобілів.
На другому перехресті (праворуч) реалізована система адаптивного світлофорного регулювання, здатна змінювати тривалість фази регулювання в залежності від завантаженості дороги в тому чи іншому напрямку. Таке регулювання здійснюється за допомогою чотирьох детекторів транспорту, які фіксують наявність автомобіля на проїжджій частині в кожному напрямку. На цьому перехресті присутні чотири автомобільних і один пішохідний світлофор. Детектори транспорту для фіксації автомобілів на стенді представлені кнопками для спрощення технічної реалізації.
Лабораторний стенд обладнаний багатоцільовим індикатором, який може використовуватися для відображення часу горіння сигналу світлофора або кількості автомобілів на парковці.
Базовий набір обладнання, необхідного для роботи системи, також виконаний у вигляді стенду (мал. 4.4). Він включає в себе програмований логічний контролер, блок живлення, модулі вводу-виводу, комунікаційний модуль, станцію розподіленого вводу-виводу, панель оператора. Комутація стендів здійснюється шляхом проводового з'єднання відповідних клем на передніх панелях стендів.

Малюнок 4.4 — Лабораторний стенд управління
На момент написання реферату робота над магітерською дисертацією ще не закінчена. Подальші дослідження будуть присвячені розробці алгоритмів і вивченню можливості застосування фаззі-логіки і нейромереж в задачах дорожнього регулювання.
Висновки
Об'єктом управління є технічний комплекс світлофорного управління міськими транспортними потоками.
Проведено аналіз існуючих систем світлофорного регулювання, а також технічних засобів, на яких ґрунтуються ці системи; виявлено їх переваги та недоліки.
Визначено концепцію системи, представлено її структурну схему. Вибрано обладнання для технічної реалізації системи.
Підготовлена лабораторна база для тестування розроблюваних алгоритмів.
Література
1. Абрамова, Л. С. Способ повышения пропускной способности регулируемых перекрёстков / Л. С. Абрамова, В. В. Ширин // Восточно-европейский журнал передовых технологий. – 2010. – Вып. 4/3 (46). – С. 62-65.
2. Бергер, Г. Автоматизация с помощью программ STEP7 LAD и FBD / Г. Бергер. – Нюрнберг: Siemens AG, 2003. – 605 с.
3. Кременец, Ю. А. Технические средства организации дорожного движения / Ю. А. Кременец. – М.: Транспорт, 1990. – 255 с.
4. Кретов, А. Ю. Обзор некоторых адаптивных алгоритмов светофорного регулирования перекрестков / А. Ю. Кретов, И. Е. Агуреев, И. Ю. Мацур // Известия ТулГУ. Технические науки. – 2013. – Вып. 7. Ч. 2 – С. 61-66.
5. Нестеров, А. Л. Проектирование АСУ ТП : метод. пособие. Кн. 1 / А. Л. Нестеров – СПб.: ДЕАН, 2006. – 552 с.
6. Нестеров, А. Л. Проектирование АСУ ТП : . метод. пособие. Кн. 2 / А. Л. Нестеров - СПб.: ДЕАН. 2009. – 552 с.
7. Олссон, Г. Цифровые системы автоматизации и управления / Г. Олссон, Д. Пиани. – 3-е изд., перераб. и доп. – СПб.: Невский диалект, 2001. – 557 с.
8. Петров, В. В. Автоматизированные системы управления дорожным движением в городах / В. В. Петров: Учебное пособие. – Омск: Изд-во СибАДИ, 2007. 104 c.
9. Петров, И. В. Программируемые контроллеры. Стандартные языки и приемы прикладного проектирования / И. В. Петров. – М.: СОЛОН-Пресс, 2004. – 256 с.
10. Федоров, Ю. Н. Справочник инженера по АСУТП. Проектирование и разработка: учеб.-практ. пособие / Ю. Н. Федоров. – М.: Инфа-Инженерия, 2008. – 928 с.