Введение
В настоящее время наблюдается увеличение количества транспортных средств (ТС), что требует обеспечение возрастающих требований к безопасности их движения на дорогах и повышения надежности управления. Для выполнения этих целей требуется автоматизация систем управления движения различными видами наземных подвижных объектов, которая позволит увеличить безопасность участников движения, оптимизировать использование различных режимов работы силовых элементов, снизить расход энергоносителя и влияние на окружающую среду. С учетом этих факторов повышается потребность в использовании встроенных компьютерных систем, которые будут определять наиболее безопасный и оптимальный маршрут.
Анализ типовой структуры автономной ТС
Ряд ведущих корпораций, такие как Google, Tesla, Яндекс, ведут разработки в области автономных ТС. Активное участие в разработке таких крупных компаний говорит о том, что внедрение автономных ТС поможет решить проблемы безопасности на дорогах [1].
Типовая структура АТС приведена на рис. 1. Она включает в себя различные датчики, систему управления и элементы ТС.
Блоки сенсоров представляют собой несколько типов сенсоров для получения информации с датчиков, и передачи данных в блок системы управления.
Система управления – это совокупность блоков для обработки полученной информации и выполнения управления элементами АТС. Система состоит из блоков распознания и классификации изображений, принятия решений, вычислений и управления АТС. Блоки элементов АТС представляют собой механизмы и узлы, которыми управляет система автономного управления.
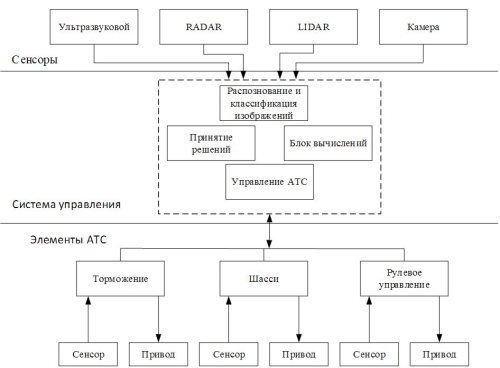
Рисунок 1. Типовая структура АТС
Математическая модель расчета траектории движения автономного транспортного средства
Существует несколько математических моделей для вычисления и расчета параметров движения. Одним из возможных вариантов расчета параметров движения ТС является применение метода наименьших квадратов [3]. Суть данного метода заключается в минимизации суммы квадратических отклонений между наблюдаемыми и расчетными величинами. Расчетные величины находятся по подобному уравнению – уравнению регрессии [3]. Наиболее точный прогноз будет получен при минимальной разнице между физическими значениями и расчетными, построенный на основе уравнения регрессии [4]. Формулы расчетов коэффициентов приведены на рисунке 2[2]:

Рисунок 2. Формулы расчетов коэффициентов
Реализация вычислений с помощью параллельных архитектур
Самым распространенным способом параллельных вычислений является использование графических процессоров (GPU). Они превосходят другие процессоры в том, что в наибольшую часть графического процессора занимают вычислительные модули, а не кэш-память и память с произвольным доступом.
Эти факторы объясняют целесообразность применения архитектуры GPU, которая изначально работает с идентичными типами данных, обрабатываемыми параллельно [4].
Для решения задачи поставленной в работе, будет использоваться программно-аппаратная архитектура параллельных вычислений CUDA на базе графических процессоров компании NVIDIA.
Вывод
Для реализации системы идентификации параметров модели наземного подвижного объекта выбрана аппаратная платформа параллельных вычислений CUDA, которая позволит ускорить вычисление параметров движения ТС.
Список использованной литературы
- Цаплин А.И. Математические модели движения транспортных средств: Учебное пособие. – Пермь: ПНИПУ, 2015. 180 с.
- Линник Ю.В. Метод наименьших квадратов и основы математико-статистической теории обработки наблюдений: Учебное пособие. – Москва: ФИЗМАТГИЗ, 1958. 328с.
- Разработка прогноза с помощью метода наименьших квадратов. [Электронный ресурс]. – Режим доступа: http://www.ekonomika-st.ru/drugie/metodi/metodi-prognoz-1-5.html
- Кривошеев С.В. Исследование эффективности параллельных архитектур вычислительных систем для расчета параметров движения транспортного средства // Научные труды Донецкого национального технического университета. Выпуск № 1(10)-2(11). Серия
Проблемы моделирования и автоматизации проектирования
. – Донецк, ДонНТУ, 2012. С. 207-214.