
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Программируемый логический контроллер Twido
- 2. Преобразователь частоты Altivar 71
- 3. Коммуникационные протоколы MODBUS и CANOPEN
- 3.1 Протокол MODBUS
- 3.2 Протокол CAN
- Выводы
- Список источников
Введение
Контроллеры Twido, выпускаемые фирмой Schneider Electric, широко используются во многих отраслях промышленности. С их помощью создаются системы управления любой сложности: от контроля работы простейшего автономного устройства до сложнейших систем, отвечающих за функционирование целого производственного процесса. Контроллер Twido используется в системах управления установками и машинами непрерывного действия любого типа, в производственных или строительных областях - в приложениях, требующих несложной, но ответственной и эффективной обработки данных.
Они предназначены для реализации систем управления широкого спектра применения. Это локальные и распределённые системы управления технологическим оборудованием производственного процесса, где требуется собирать данных с объекта через входные цепи котроллера, обрабатывать информацию внутренней программой управления и выдавать сигналы управления на исполнительные элементы объекта. В зависимости от сложности системы управления контроллеры Twido выпускаются в двух вариантах: в компактном виде и модульном.
Одним из типовых применений контроллеров серии Twido во Франции стало использование их в системах автоматического ввода резерва (АВР). АВР – система, которая позволяет управлять основным и резервным источниками питания для обеспечения надежного электроснабжения.
В России лидером по внедрению ПЛК Twido в системах АВР стало ОАО «Газпром» в лице своего дочернего предприятия «Калининградгазавтоматика» (КГА). Наличие АВР, как правило, необходимо для всех ответственных потребителей. Первые TWIDO были использованы заводом КГА для установки в НКУ гаммы OKKEN для предприятия «Север Газпром», а также ячеек MASTERBLOCK. Решение, разработанное для ОАО «Газпром», – пилотный проект для России.
Преимущество использования контроллеров для АВР перед релейной автоматикой состоит и в том, что они могут быть очень быстро адаптированы к требованиям заказчика. Фактически электрическая схема одинакова для всех типов АВР – меняются только переменные программы. С помощью TwidoSoft программа очень быстро создается, тестируется и адаптируется под конкретные условия. Стоимость проектов АВР с TWIDO будет заметно ниже, а размеры шкафа уменьшаются почти вдвое. Преимуществами Twido также являются возможность дистанционного перепрограммирования и диагностики, сокращение количества запасных частей. Кроме того, для заказчика очень важна техническая поддержка, которую гарантирует ЗАО «Шнейдер Электрик».
В распоряжении кафедры ЭАПУ имеется лаборатория с данным промышленным оборудованием, в связи с чем возникла необходимость в подготовке методических рекомендаций для его освоения. В данной работе предложены методические указания для работы с плк Twido . Целью указаний является получение студентами навыков работы с промышленным оборудованием на примере плк Twido, частотном преобразователе Altivar 71. Основные задачи в работе следующее:
- ознакомиться с данным оборудованием
- изучить программную среду для работы с плк Twido
- изучить особенности промышленных протоколов Modbus и CANopen;
- подготовить методические рекомендации по работе с данным оборудованием для студентов.
1. Программируемый логический контроллер Twido
Современные промышленные системы автоматизации – это микропроцессорные устройства, которые кроме выполнения классических задач управления и регулирования могут также решать задачи коммуникации и технической визуализации. За счет этого гораздо удобнее решаются задачи построения иерархических систем управления производством.
Аппаратная часть микропроцессорных систем автоматизации может быть реализована на основе одной из двух платформ – это ПК или ПЛК.
ПЛК – программируемый логический контроллер, который специализирован для использования автоматизации технологических процессов. Основным режимом работы ПЛК является длительное автономное использование.
Контроллеры Twido (рис. 1) выпускаются двух типов:
- компактные базовые блоки;
- модульные базовые блоки.
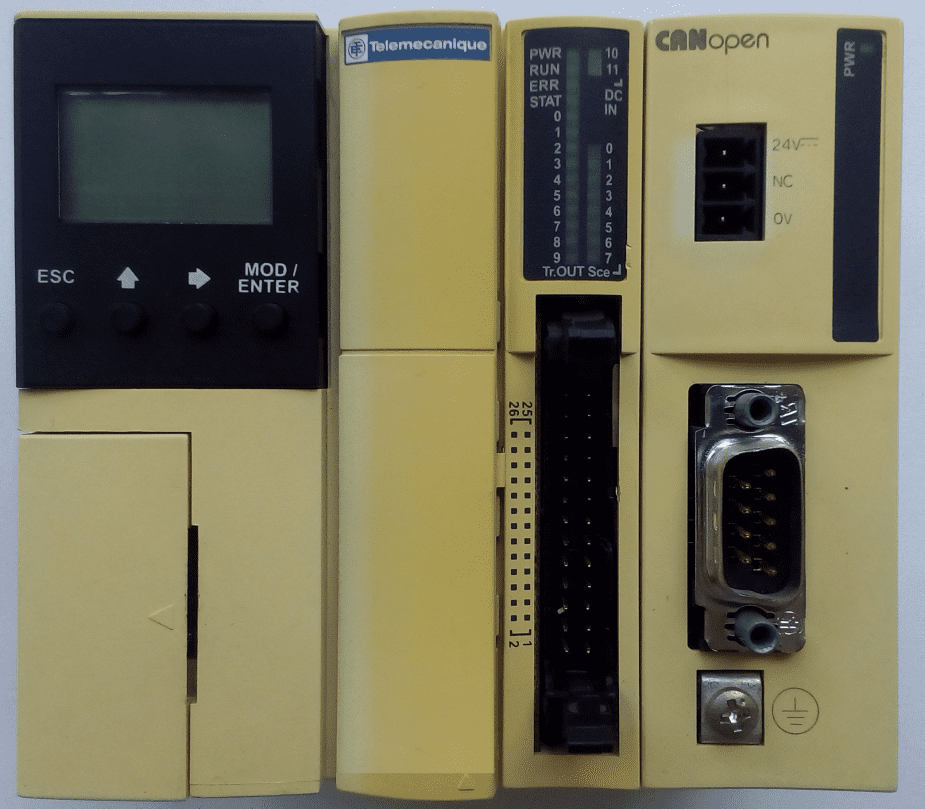
Рисунок 1 – Внешний вид ПЛК Twido и различных модулей расширения
Компактные базовые блоки выпускаются с 10, 16, 24 или 40 каналами ввода-вывода (входами-выходами).
Модульные базовые блоки выпускаются с 20 или 40 каналами ввода-вывода (входами-выходами).
Количество каналов ввода-вывода может быть увеличено с помощью модулей расширения:
- модули ввода-вывода дискретных сигналов или релейные (15 моделей);
- модули ввода-вывода аналоговых сигналов (9 моделей).
ПЛК Twido в компактном или модульном исполнении предназначен для несложных электроустановок или небольших станков, поэтому его модули расширения ввода/вывода, дополнительные блоки, а также программное обеспечение разработаны для достижения наибольшей гибкости и простоты.
Серия модульных программируемых контроллеров Twido включает в себя пять контроллеров, различающихся производительностью процессора, количеством и типом точек входа/выхода (20 или 40 точек с подключением через винтовую клеммную колодку или разъём HE 10, с релейными или транзисторными (источник/приемник) выходами). К контроллерам можно подключить любой модуль расширения ввода/вывода (из 18 дискретных и аналоговых модулей). Все модульные контроллеры используют напряжение питания 24 В постоянного тока.
Преимущества модульных контроллеров Twido:
- модульная конструкция, обеспечивающая подключение от 4 до 7 модулей расширения дискретного или аналогового ввода/вывода к базовому контроллеру (в зависимости от модели);
- разнообразие дополнительных модулей, обеспечивающее степень гибкости платформ больших контроллеров. К модульным контроллерам TWD LDMA одновременно можно подключить модули карты памяти, карты часов реального времени, цифрового дисплея или последовательного интерфейса. В последние два модуля можно добавить адаптер второго последовательного порта RS-485 или RS-232C;
- несколько вариантов подключения, таких как съёмные винтовые клеммные колодки, подключение пружинного типа или разъёмы HE 10, обеспечивающие простое, быстрое и безопасное подсоединение.
Модуль расширения с дисплейным терминалом пользователя – исполнительный терминал пользователя, который может быть установлен на любой базовый блок в виде отдельного модуля расширения TWDXCPODM (рис. 2).
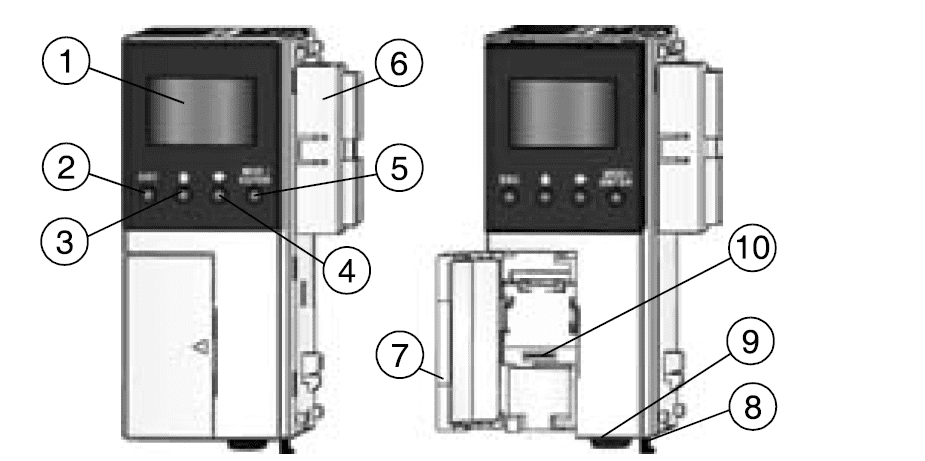
Рисунок 2 – Внешний вид модуля расширения TWDXCPODM
Дисплейный терминал пользователя обеспечивает:
- отображение информации о состоянии контроллера;
- управление базовым блоком;
- контроль и настройку объектов прикладных данных.
Дисплейный терминал пользователя может находиться в двух рабочих режимах:
- отображение – индикация данных;
- редактирование – изменение данных.
При установке в разъем последовательного порта 2 (поз. 10) коммуникационный адаптер TWDNAC485T можно осуществить подключение ПЛК и ПЧ по протоколуModbus.
Модуль, служащий для подключения с использованием базовых протоколов TWDLMDA20DTK (20-канальный базовый блок) приведен на рисунке 3
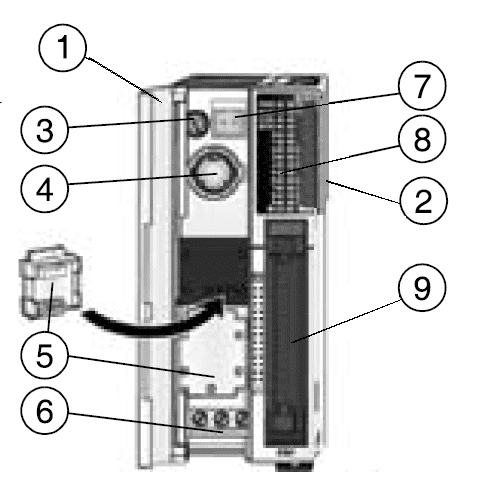
Рисунок 3 – Внешний вид блока TWDLMDA20DTK
Модуль TWDLMDA20DTK содержит 12 дискретных входов и 8 дискретных выходов (8 транзисторных выхода типа «источник», рис. 4).
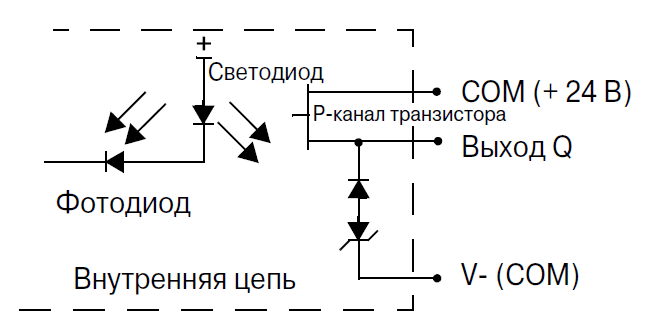
Рисунок 4 – Схема выходного транзисторного выхода типа «источник»
Для подключения дискретных входов и выходов была использована стандартная, рекомендованная производителем схема подключения, которая представлена на рис. 5.
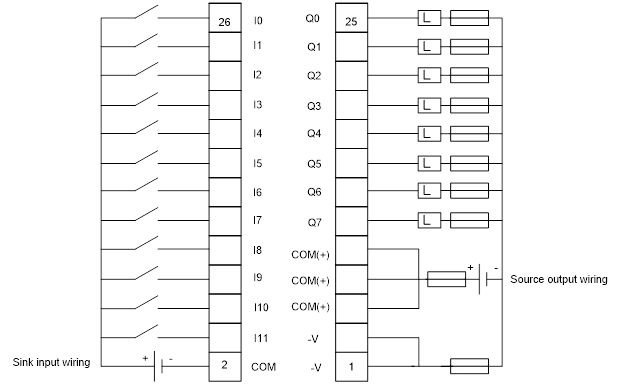
Рисунок 5 – Схема соединений модульного базового блока TWDLMDA20DTK
Слева расположены входные контакты, справа – выходные. Контакты COM и COM(+) внутри модуля между собой электрически не соединены, в свою очередь три контакта COM(+) электрически соединены между собой внутри модуля и, следовательно, нет необходимости «запитывать» каждый из этих контактов, достаточно запитать один из них. Так же можно отметить, что контакты –V (которые являются зажимами положительного выходного напряжения) соединены электрически между собой внутри модуля. Если цепь нагрузки нуждается в дополнительной защите, то необходимо установить предохранители нужного номинала.
Ведущий модуль шины CANopen (TWDNCO1M) используется для подключения ПЛК по протоколу CANopen (рис. 6).
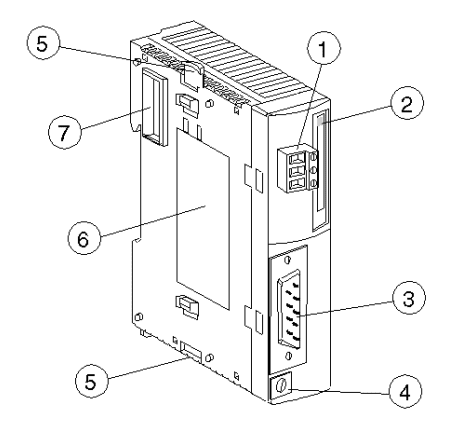
Рисунок 6 – Ведущий модуль шины TWDNCO1M
2. Преобразователь частоты Altivar 71
Наиболее распространённый метод пуска асинхронных двигателей– напрямую от линии питающего напряжения (прямой пуск). Эта технология часто подходит для широкого спектра механизмов. Однако она несет в себе ограничения, которые не позволяют ее применять в некоторых приложениях:
- бросок тока при старте может вносить помехи в работу других приборов, подключенных к той же линии питания;
- механическая ударная нагрузка в процессе старта, которая не допустима для устройства или может оказать вредное воздействие на комфорт и безопасность пользователя;
- невозможно управлять разгоном и торможением;
- невозможно регулировать скорость.
Для решения вышеуказанных проблем были разработаны преобразователи частоты.
Эти устройства обеспечивают преобразование напряжения переменного тока одной частоты в напряжение переменного тока другой частоты. Частота, амплитуда и фаза выходного напряжения регулируется в определенных пределах. Количество фаз входного и выходного напряжения при этом также может отличаться.
Типовая структурная схема преобразователя частоты приведена на рис. 7 ПЧ со звеном постоянного тока обычно не предусматривают необходимость использования входного или выходного трансформатора.
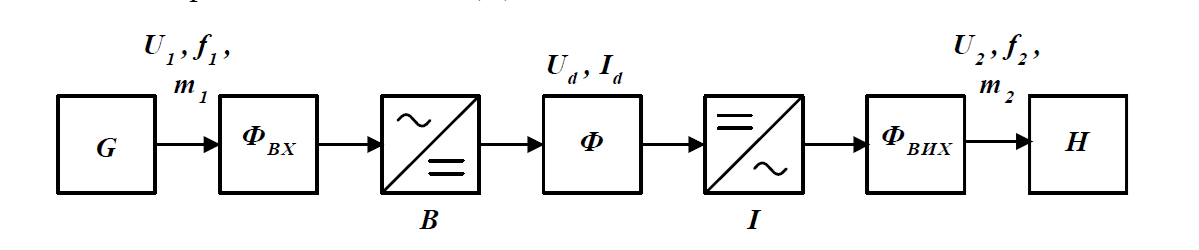
Рисунок 7 – Структурная схема ПЧ со звеном постоянного тока
Структурная схема ПЧ со звеном постоянного тока содержит:
- m1 – фазный источник (G) переменного тока с напряжением U1 и частотой f1;
- входной фильтр (ФВХ), для уменьшения влияния на сеть со стороны ПЧ;
- выпрямитель (В);
- фильтр (Ф) в цепи постоянного тока, что, наряду со сглаживанием напряжения, оказывает во входной цепи инвертора свойства источника напряжения;
- m2 –фазный инвертор (И) с выходным напряжением U2 и частотой f2;
- выходной фильтр (ФВЫХ) для улучшения выходных параметров ПЧ;
- m2 – фазная нагрузка (Н).
Функции регулирования частоты выходного напряжения выполняет инвертор. Регулирование амплитуды выходного напряжения (тока) возможно двумя способами:
- амплитудное изменение напряжения постоянного тока на входе инвертора;
- импульсное, которое осуществляется инвертором при неизменном напряжении постоянного тока на входе.
В зависимости от этого используется управляемый или неуправляемый выпрямители. Наличие значительной емкости в цепи постоянного тока ПЧ с инвертором на порядок снижает скорость изменения напряжения, существенно ограничивает возможности амплитудного регулирования напряжения. В результате в наше время наибольшее распространения находят ПЧ с использованием ШИМ (рис. 8).
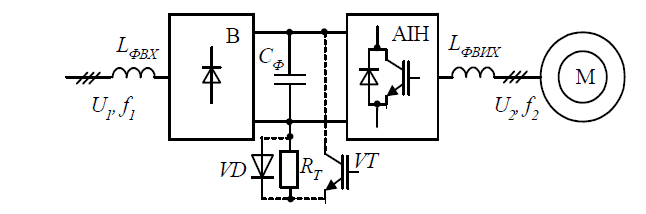
Рисунок 8 – Структурная схема ПЧ со звеном постоянного тока и АИН
Altivar– это линейка преобразователей частоты фирмы Schneider Electric. Преобразователь частоты Altivar 71 (общий вид которого представлен на рис. 9) появился на свет, как результат сотрудничества двух крупнейших электротехнических компаний мира Schneider Electric и Toshiba.

Рисунок 9 – Преобразователь частоты ATV 71
Новейшее поколение преобразователей Altivar 71 – обеспечивает безупречные характеристики и широкие функциональные возможности. Данный преобразователь открыт для всех коммуникационных сетей и адаптируемый к различным сферам применениям с учетом особенностей каждого механизма.
Характеристики ПЧ Altivar 71:
- пусковой момент до 220 % Mn;
- управление потоком в замкнутой/разомкнутой системе с асинхронными двигателями – векторное;
- функция регулирования скорости и момента;
- функция управления работой синхронных двигателей в разомкнутой системе;
- перегрузочная способность: 170 % в течении 1 минуты, 220% в течении 2 сек;
- преобразователь Altivar 71 может использоваться с двигателями мощностью от 0,25 кВт до 5,5 кВт.
Серия преобразователей частоты Altivar 71 отвечает самым строгим требованиям применений благодаря использованию разнообразных законов управления двигателем и многочисленным функциональным возможностям.
Серия ПЧ Altivar 71 адаптирована для решения наиболее сложных задач электропривода:
- момент и повышенная точность при работе на очень низкой скорости и улучшенные динамические характеристики с алгоритмами векторного управления потоком в разомкнутой или замкнутой системе привода;
- расширенный диапазон выходной частоты для высокоскоростных двигателей;
- параллельное включение двигателей и специальные приводы с использованием скалярного закона управления;
- точность поддержания скорости и энергосбережение для разомкнутого привода с синхронным двигателем;
- плавное, безударное управление несбалансированными механизмами с помощью системы адаптации мощности (Energy Adaptation System ENA).
Многофункциональность преобразователя Altivar 71 увеличивает производительность и гибкость использования машин для многочисленных применений.
Также данный тип ПЧ можно использовать для задач подъемно-транспортного оборудования:
- управление тормозом, адаптированное для приводов перемещения, подъема и поворота;
- весоизмерение;
- подъем с повышенной скоростью;
- контроль состояния тормоза;
- управление воздействием концевых выключателей окончания хода.
3. Коммуникационные протоколы MODBUS и CANOPEN
3.1 Протокол MODBUS
Modbus – коммуникационный протокол, основанный на клиент-серверной архитектуре. Разработан фирмой Modicon для использования в контроллерах с программируемой логикой (PLC). Стал стандартом де-факто в промышленности и широко применяется для организации связи промышленного электронного оборудования. Использует для передачи данных последовательные линии связи RS-485, RS-422, RS-232, а также сети TCP/IP. В настоящее время поддерживается некоммерческой организацией Modbus-IDA. Протокол Modbus описывает единый простой формат передачи данных PDU, который в свою очередь входит в полный пакет ADU. Формат ADU меняется в зависимости от типа линии связи. Существуют три режима протокола: Modbus RTU, Modbus ASCII, Modbus TCP.
Протокол Modbus RTU предполагает одно ведущее (запрашивающее) устройство в линии (master), которое может передавать команды одному или нескольким ведомым устройствам (slave), обращаясь к ним по уникальному в линии адресу. Синтаксис команд протокола позволяет адресовать 247 устройств на одной линии связи стандарта RS-485 (реже RS-422 или RS-232).
Некоторые варианты топологии сети приведены на рис. 10.
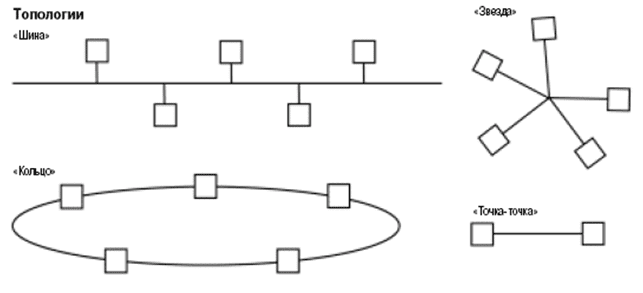
Рисунок 10 – Топологии сети
Термины и определения MODBUS. Обмен информацией происходит по инициативе ведущего (master). Он включает запрос от ведущего и ответ от ведомого (slave). Запросы от ведущего адресуются:
- Конкретному ведомому (идентифицируемому по его номеру в первом байте кадра запроса) (рис. 11)
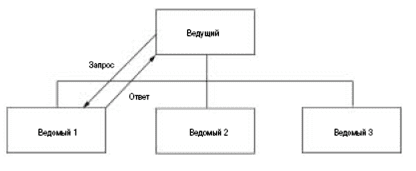
Рисунок 11 – Запрос-ответ
- Всем ведомым (рассылка) (рис. 12)
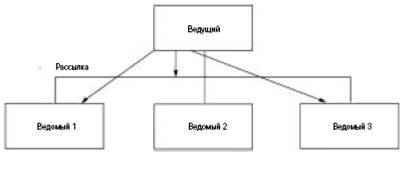
Рисунок 12 – Рассылка
Команды рассылки всегда являются командами записи. Ведомые не формируют ответы при получении таких команд.
Протокол Modbus использует кадры со стандартными началами и окончаниями. Адрес размещен в начале кадра.
Инициатива проведения обмена всегда исходит от ведущего устройства. Ведомые устройства прослушивают линию связи. Мастер подаёт запрос (посылка, последовательность байт) в линию и переходит в состояние прослушивания линии связи. Ведомое устройство отвечает на запрос, пришедший в его адрес. Окончание ответной посылки мастер определяет, по временному интервалу между окончанием приёма предыдущего байта и началом приёма следующего. Если этот интервал превысил время, необходимое для приёма двух байт на заданной скорости передачи, приём кадра ответа считается завершённым.
3.2 Протокол CAN
Полевая шина CAN (Controller Area Network) характеризуется высокими скоростью передачи данных и помехоустойчивостью, а также способностью обнаруживать любые возникающие ошибки. Не удивительно, что благодаря этому CAN сегодня широко используется в таких областях, как автомобильный и железнодорожный транспорт, промышленная автоматика, авиация, системы доступа и контроля. По данным ассоциации CiA (CAN in Automation), в настоящее время в эксплуатации находится около 300 млн CAN-узлов по всему миру. В Германии CAN-шина занимает первое место по популярности среди остальных полевых шин.
Общая тенденция в области автоматизации состоит в замене традиционной централизованной системы управления на распределенное управление путем размещения интеллектуальных датчиков и исполнительных механизмов рядом с управляемым процессом. Это вызвано ростом числа проводов связи, увеличением количества соединений, сложностью диагностики ошибок и проблемами с надежностью. Связь между узлами такой системы осуществляется с помощью полевой шины. CAN — это система связи для многоконтроллерных систем. Рассмотрим более подробно преимущества CAN и причины, по которым CAN приобретает все большее распространение.
Протокол CAN активно используется уже более 20 лет, что очень важно для таких консервативных областей как железнодорожный транспорт или судостроение. CAN был разработан в 1980 г. фирмой Robert Bosch для автомобильной промышленности. CAN-интерфейс регламентирован международными стандартами ISO 11898 для высокоскоростных и ISO 11519-1 для низкоскоростных приложений. Низкая стоимость определяется хорошим соотношением цена/производительность, также широкой доступностью CAN-контроллеров на рынке. Надежность определяется линейной структурой шины и равноправностью ее узлов, так называемой мультимастерностью (Multi Master Bus), при которой каждый узел CAN может получить доступ к шине. Любое сообщение может быть послано одному или нескольким узлам. Все узлы одновременно считывают с шины одну и ту же информацию, и каждый из них решает, принять данное сообщение или игнорировать его. Одновременный прием очень важен для синхронизации в системах управления. Отказавшие узлы отключаются от обмена по шине.
Высокая помехоустойчивость достигается благодаря подавлению синфазных помех дифференциальным приемопередатчиком, работе встроенных механизмов обнаружения ошибок (одна необнаруженная ошибка за 1000 лет при ежедневной 8-часовой работе сети на скорости 500 Кбит/с), повтору ошибочных сообщений, отключению неисправных узлов от обмена по шине и устойчивости к электромагнитным помехам.
Гибкость достигается за счет простого подключения к шине и отключения от шины CAN-узлов, причем общее число узлов не лимитировано протоколом нижнего уровня (рис. 13). Адресная информация содержится в сообщении и совмещена с его приоритетом, по которому осуществляется арбитраж. В процессе работы возможно изменение приоритета передаваемого сообщения. Следует также отметить возможность программирования частоты и фазы передаваемого сигнала и арбитраж, не разрушающий структуру сообщений при конфликтах. На физическом уровне есть возможность выбора разнотипных линий передачи данных: от дешевой витой пары до оптоволоконной линии связи.
Рисунок 13 – Сигнальные уровни на CAN-шине
Работа в реальном времени становится возможной благодаря механизмам сетевого взаимодействия (мультимастерность, широковещание, побитовый арбитраж) в сочетании с высокой скоростью передачи данных (до 1 Мбит/с), быстрой реакцией на запрос передачи и изменяемой длиной сообщения от 0 до 8 байт.
Выводы
Использование этих методических указаний поможет студентам ознакомиться с промышленным оборудованием и научиться программированию в среде программируемого логического контроллера Twido.
В магистерской работе рассмотрено оборудование лабораторно стенда фирмы Schneider Electric и реализована система Master/Slave на базе протоколов Modbus и CANopen. В ней были предложены методические указания, которые помогут познакомиться с оборудованием лабораторного стенда и позволяют получить студентам навыки для работы с программируемым логическим контроллером Twido.
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: июнь 2023 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
- Энциклопедия АСУ ТП [Электронный ресурс]. Режим доступа: http://www.bookasutp.ru/Chapter2_1....
- Протоколы и сети Modbus и Modbus TCP [Электронный ресурс]. Режим доступа: http://www.cta.ru/cms/f/435973....
- CAN и CANopen: основы [Электронный ресурс]. Режим доступа: http://www.fb.asu.in.ua/seti/q_and_/can-i-....
- Техническое руководство. Программируемые контроллеры Twido. Модульные и компактные базовые блоки – SchneiderElectric.
- Преобразователь частоты Altivar 71 [Электронный ресурс]. Режим доступа: http://promalfa.ru/Preobrazo....
- Преобразователь частоты Altivar 71 [Электронный ресурс]. Режим доступа: http://elektroautomat.in.ua/subcate....
- Преобразователи частоты. Altivar 71 – Schneider Electric.
- Twido. Программируемые контроллеры: справочное руководство по программному обеспечению – SchneiderElectric.
- Altivar 71. User's manual – Schneider Electric.
- ГерасимовА.В.,ТерюшовИ.Н.,ТитовцевА.С.Программируемые логические контроллеры: учебное пособие-Казань: издательство Казань гос.тех.ун-та,2008.-169с.