
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Общие сведения о квадрокоптерах
- 2. Разработка аппаратуры управления
- 2.1 Разработка пульта управления
- 2.2 Разработка приемника
- 3. Выбор комплектующих для сборки квадрокоптера
- Выводы
- Список источников
Введение
В настоящее время беспилотные летающие аппараты (БПЛА) стали появляться во многих сферах жизни человека - начиная от их использования в развлекательных целях в качестве игрушек, любительской фото- и видеосъемки, гонках на квадрокоптерах с видом от первого лица, заканчивая визуальным контролем состояния различных сетей и коммуникаций, обработкой сельхозугодий химикатами, доставкой грузов, применением в военных целях. Подавляющая часть этих беспилотных летательный аппаратов являются мультикоптерами. Мультикоптер – это летательный аппарат вертолетного типа с тремя и более несущими винтами. В обиходе такие устройства часто называют дронами (англ. drone – трутень). Впервые для описания беспилотного летательного аппарата это слово было использовано в середине тридцатых годов прошлого века. Им обозначали биплан-мишень, крылья которого для придания жесткости были скреплены между собой стальной проволокой и издавали звук, похожий на пчелиное жужжание. В настоящее время дроном называют не только беспилотные летательные, но и наземные, подводные аппараты, а также зооморфные и антропоморфные роботы. С точки зрения терминологии, это не верно, т.к. не все перечисленные аппараты выполняют заданную работу автономно, без участия оператора. Поэтому, во избежание неточности, летательные аппараты, построенные по вертолетной схеме с несколькими несущими винтами следует называть мультикоптерами или мультироторами. Дроном его можно назвать, например, в том случае, если мультикоптер осуществляет полет по заданному маршруту или направляется в точку старта при потере сигнала с аппаратурой управления.
Важную роль в квадрокоптерах, определяющую его функционал, имеет управляющая микросхема или полетный контроллер (ПК) — электронное устройство с микроконтроллером с установленным в него программным обеспечением, датчиками для ориентации в пространстве и разъемами для подключения других компонентов. ПК принимает и обрабатывает команды от пользователя, отслеживает движение, рассчитывает пропорционально-интегрально-дифференциальные коэффициенты (PID) в соответствие с программным обеспечением и отправляет управляющие сигналы на исполнительные устройства. Причем конструктивно одинаковые полетные контроллеры могут работать под управлением разного программного обеспечения, что позволяет улучшать полетные характеристики в зависимости от конфигурации квадрокоптера.
1. Общие сведения о квадрокоптерах
Вне зависимости от того, будет собирается квадрокоптер из набора деталей или будет готов к полету после покупки, он состоит из следующих основных частей:
– Аккумуляторная батарея – литий полимерная (LiPo), реже литий-ионная (Li-Ion).
– Плата распределения питания. Имеет узел подключения для батареи и множество выходов для питания всех компонентов квадрокоптера. Может иметь преобразователи напряжения с выходами 5В, 12В для питания сервоприводов, камер и другого оборудования.
– Полетный контроллер, осуществляющий управление квадрокоптером. Кроме микроконтроллера, включает в себя инерциальный измерительный блок — акселерометр, измеряющий линейное ускорение по 1-3 осям и гироскоп, измеряющий угол наклона по основным осям. Дополнительно плата ПК может иметь в своем составе магнетометр для определения частей света и барометром, который обеспечивает стабильное зависание на выбранной оператором высоте. Может дополнительно подключаться модуль GPS для реализации автоматического полета по заданным точкам, облета вокруг точек интереса и возвращения в точку старта.
– Четыре электронных контроллера скорости (ESC — Electronic Speed Controller), регулирующие скорость вращения двигателей исходя из подаваемых на них полетным контроллером сигналов.
– Четыре асинхронных бесколлекторных двигателя с несущими винтами, создающими подъемную силу. Последние имеют отличающуюся форму для направления вращения против и по часовой стрелке. Винты могут иметь от двух до четырех лопастей, как складных, которые фиксируются в нужной форме за счет центробежной силы, так и цельных.
– Система дистанционного управления, включающую пульт управления, с которого отправляются сигналы управления и приемник, установленный на квадрокоптере, передающий сигналы на ПК. Связь между ними осуществляется за счет радиоволн на частотах, как правило, 2.4ГГц либо 5.8ГГц.
– Рама, на которой крепятся все элементы. В самой распространенной конфигурации она симметрична относительно продольной и поперечной оси. Чаще всего исполняется из пластика, углеволокна или стекловолокна, реже — из алюминия.
Также на квадрокоптере может быть установлено следующее дополнительное оборудование: сервоприводы, звукоизлучатель для извещения о низком заряде батареи, модуль GPS, подвес с камерой, система FPV (с англ. First Person View —вид от первого лица). Последняя представляет собой установленную на квадрокоптере камеру с видеопередатчиком, отправляющим данные на видеоприемник, с которого изображение выводится на экран или специальные очки. Может включать в себя плату OSD (On Screen Display), которая отображает на экране полетные данные, например, высоту, удаление от точки старта, координаты, напряжение батареи.
Так как у каждой составной части в настоящее время существует огромное количество аналогов, подробнее о них будет написано в следующих подразделах. Что касается управления, тут стоит отметить, что для противодействия гироскопическому эффекту одна пара противоположных по диагонали винтов вращаются по часовой стрелке, другая против. Они имеют маркировку CW (с англ. Clockwise – по часовой стрелке) и CWW (с англ. Counterlockwise – против часовой стрелки).
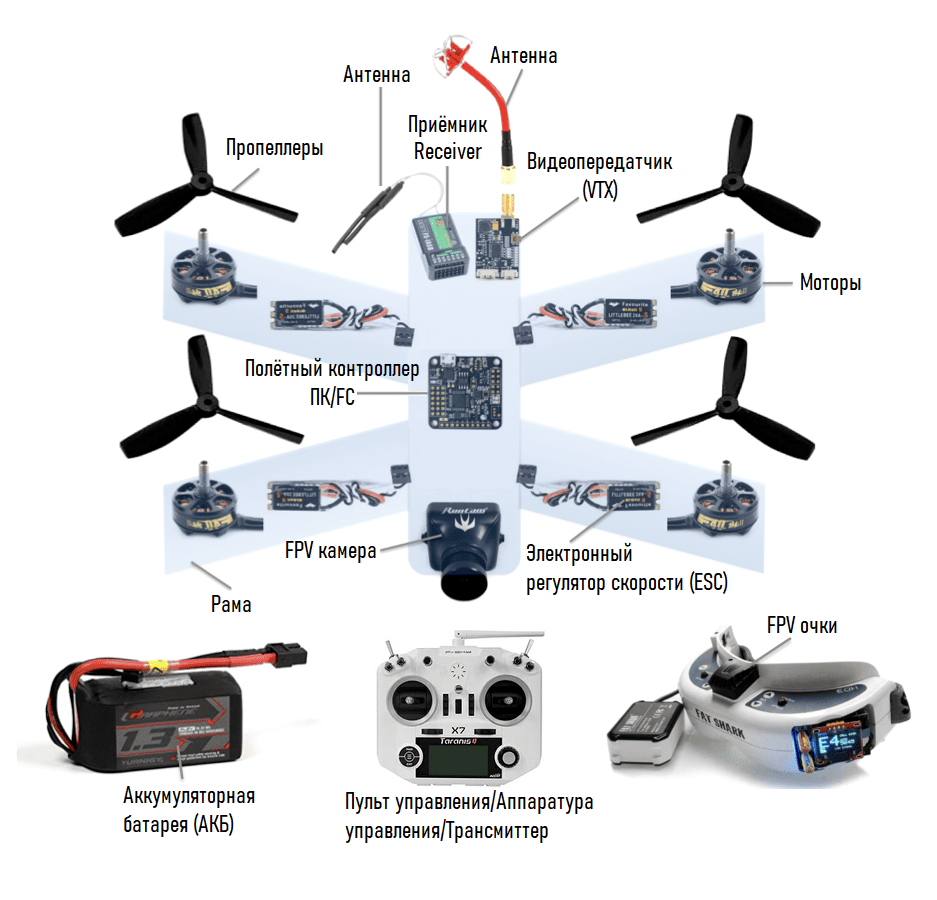
Рисунок 1 – Структурная схема строения квадрокоптера
С аппаратуры управления посредством радиосигнала определенной частоты на приемник отправляются сигналы по отдельным каналам — для каждого действия, задающего положение квадрокоптера в пространстве, существует свой канал. Приемник принимает сигналы от аппаратуры и передает их на полетный контроллер, который обрабатывает входящие сигналы и, в соответствие с программным обеспечением и данными с датчиков, создает управляющий сигнал посредством широтно-импульсной модуляции для электронных контроллеров скорости, которые непосредственно управляют электродвигателями с несущими винтами, создавая подъемную силу.
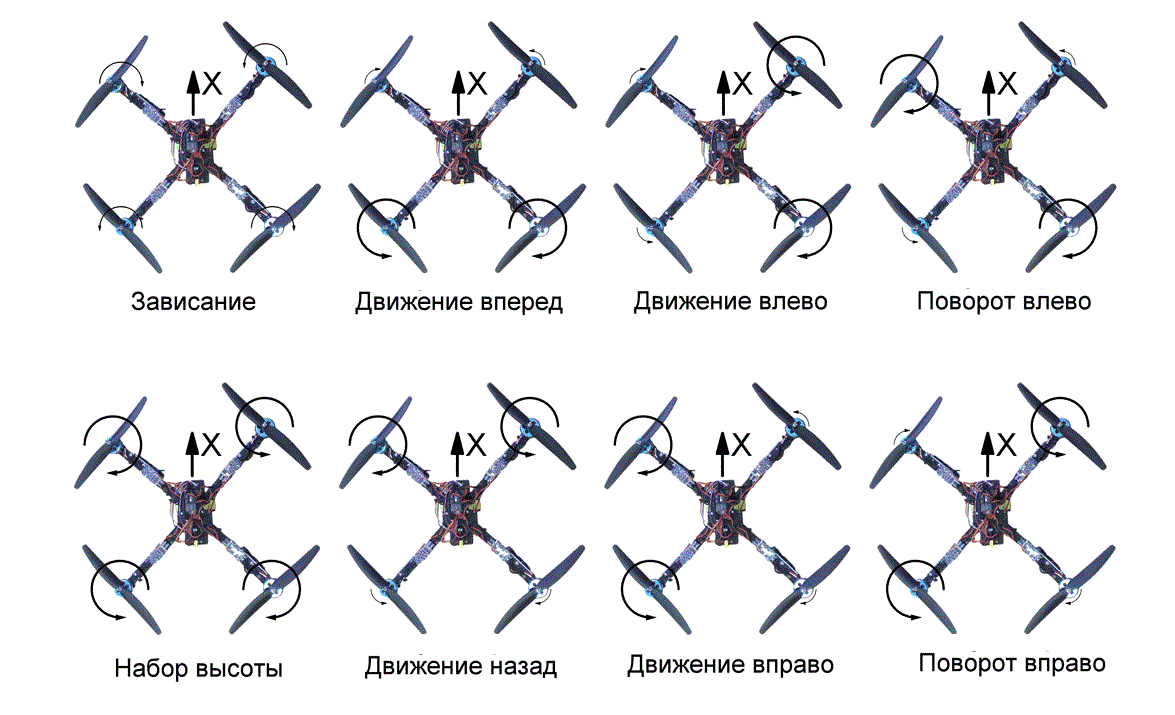
Рисунок 2 – Управление движением квадрокоптера
2.Разработка аппаратуры управления
2.1 Разработка пульта управления
Важным параметром аппаратуры управления является протокол передачи данных. На данный момент, не все выпускаемые полетные контроллеры поддерживают протокол ШИМ (PWM), передающий отдельные сигналы по отдельным каналам. Поэтому изначально стоит разрабатывать аппаратуру, работающую по протоколу PPM, представляющий собой аналоговый сигнал, в котором закодированы несколько каналов управления. Плюсом является передача по одному сигнальному проводу, что облегчает подключение, повышает надежность и незначительно снижает вес. PPM состоит из последовательности импульсов одинаковой длины, время между импульсами tn определяет состояние канала n.
Максимальному значению канала будет соответствовать импульс, длиной в 2мс, минимальному — в 1мс. На приведенном ниже графике первый канал находится в максимальном значении, второй в минимальном, третий канал передает среднее значение. У 8-канальной аппаратуры управления время серии, т.е. импульсов всех каналов, составляет 22.5мс. При этом в сумме отправляются 9 импульсов, начальный импульс указывает на начало передачи серии.

Рисунок 3 – Передача данных с различным состоянием каналов
Для создания пульта управления, передающего сигналы, будут использованы следующие детали:
– Плата Arduino Mini для обработки сигналов с джойстиков и переключателей, передачи сигналов на радиомодуль.
– Радиомодуль NRF24L01 в исполнении с усилителем и антенной для передачи сигнала на приемник.
– Линейный регулятор напряжения AMS1117 для питания радиомодуля.
– 2 трехпозиционных тумблера, 2 двухпозиционных тумблера для таких функций, как переключение режимов полета, перевода квадрокоптера в включенное/выключенное состояние.
– 2 джойстика для управления уровнем газа, тангажа, крена, рыскания.
Для выставления нулевого значения осей джойстиков можно использовать подстроечные резисторы в качестве триммеров, т.к. в центральном положении джойстики могут выдавать значения, отличные от нуля. В данной работе триммирование джойстиков будет реализовано программно.
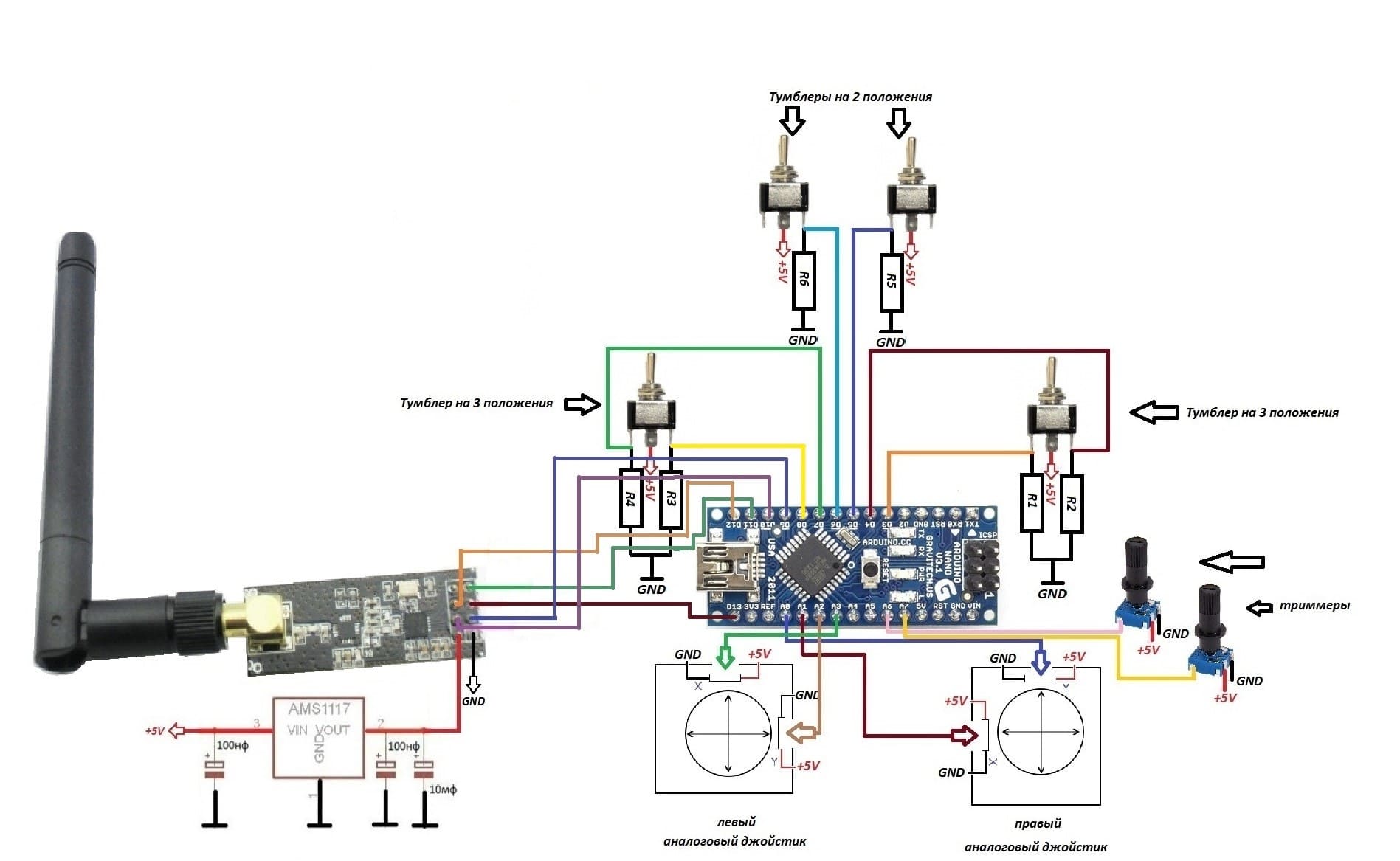
Рисунок 4 – Схема подключения деталей пульта управления
Дополнительные каналы напрямую передаются на приемник, их функционал настраивается в программе с прошивкой для полетного контроллера. После прошивки, например, в программе BetaFlight, необходимо во вкладке “Configuration” в графе “Reciver” и установить пункт “PPM RX input” для приема данного сигнала полетным контроллером.
2.2 Разработка приемника
Для сборки приемника потребуется Arduino Mini для обработки сигналов с радиомодуля и передачи сигналов на полетный контроллер, радиомодуль NRF24L01 и линейный регулятор напряжения AMS1117 для питания радиомодуля. Можно использовать NRF24L01 с усилителем сигнала и антенной для максимальной дальности передачи данных, а также добиться снижения веса такой платы с помощью удаления пластиковой оболочки антенны и присоединения ее напрямую с помощью пайки. Это позволит снизить вес на 12 г при общем весе радиомодуля около 15 г. Это позволит добиться почти идентичного веса с платой в исполнении без усилителя и антенны, при этом увеличив дальность связи до двух раз.
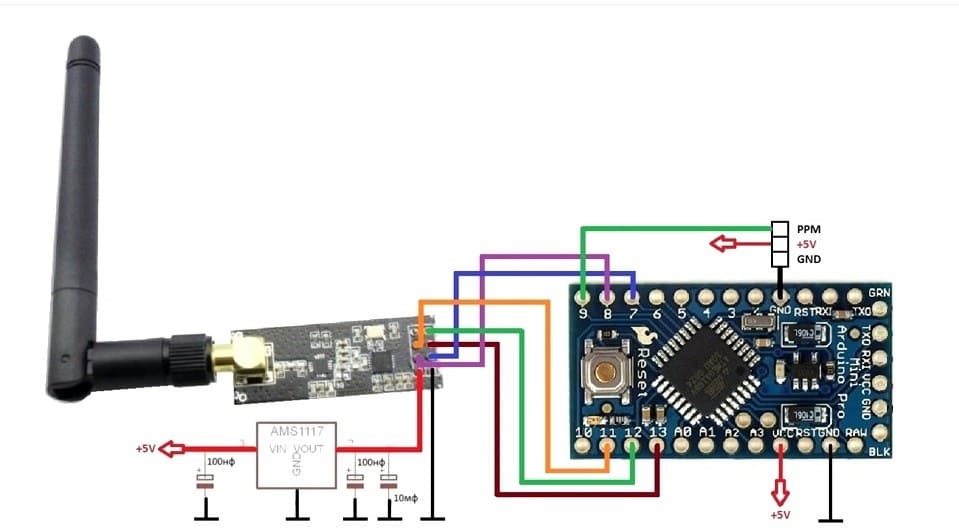
Рисунок 5 – Схема подключения деталей приемника
3.Выбор комплектующих для сборки квадрокоптера
Для подбора деталей прежде всего нужно определится со сферой применения квадрокоптера. В данной работе будут рассмотрены комплектующие, которые позволят собрать квадрокоптер с развитой системой автоматизации и возможностью осуществлять продолжительные полеты (30-40 мин), но имеющий также отличные динамические характеристики. Для этого определимся с выбором подходящей рамы, которая позволит установить остальные детали. Подойдет рама размером 280-300 мм и несколькими монтажными площадками, установленными друг над другом, например, XL7. Такой тип рамы имеет малый вес, т.к. изготавливается из углеволокна, выпускается многими производителями и имеет широкое распространение, поэтому есть возможность купить запасные лучи рамы в случае поломки основных.
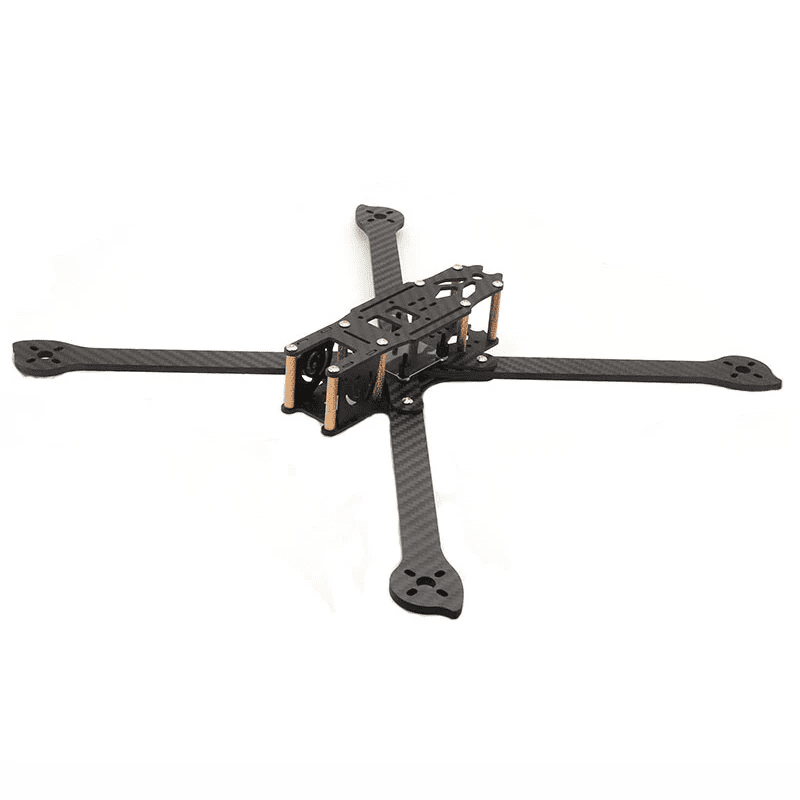
Рисунок 6 – Рама XL7
Размер внутренней площадки позволит установить все необходимое оборудование, включая камеру FPV, под площадкой может разместиться аккумулятор большой емкости, на верхней площадке будет крепиться модуль GPS. Данная конфигурация рамы изготавливается в нескольких размерах, цифра в названии рамы обозначает рекомендуемый размер несущих винтов, в данном случае он составляет 7 дюймов. Достоинством такого размера пропеллеров является их широкий выбор. Хорошим вариантом будут пропеллеры зарекомендовавшей себя марки HQProp DP7X4X3 c тремя лопастями благодаря качественному изготовлению и невысокой цене.
Для данных пропеллеров подойдут бесколекторные двигатели EMAX ECO II 2207 1700KV как одни из лучших по соотношению цены к качеству и энергоэффективности. Модель 1700KV позволит дать хорошие динамические характеристики. Можно увеличить время полета при использовании двигателей с меньшим KV. Класс качества данных двигателей гарантирует хорошее качество сборки и низкое количество вибраций, что положительно скажется на работе гироскопа и других датчиков. С выбранными винтами данный двигатель будет потреблять 27А при 100% газа от батареи 4S. Тяга одного двигателя составляет 980 г, а приблизительный вес квадрокоптера составит 1000 г. Отношение общей тяги к весу составит 3.9, что является отличным показателем и позволит в дальнейшем увеличивать вес полезной нагрузки.
Учитывая токопотребление двигателей, выберем подходящие регуляторы скорости с номинальной мощностью 25-30А. Остановимся на четырех отдельных ESC для того, чтобы минимизировать стоимость ремонта, т.к. при падении квадрокоптера часто повреждается плата регуляторов скорости 4-в-1. В случае поломки отдельного регулятора его будет проще и дешевле заминить. ESC c 32-х битным контроллером STM32F0 стоит рассматривать только среднего и высокого ценового диапазона из за присутствия помех на сигнальных проводах ESC в низшем ценовом диапазоне. При этом последнее поколение регуляторов скорости обеспечивает несущественное уменьшение задержки передачи данных, которое не будет ощущаться при управлении квадрокоптером. Поэтому приоритетными будут ESC c поддержкой цифровых протоколов Dshot. Отличным вариантом являются Hglrc 30A. Данные регуляторы поддерживают протокол передачи данных Dshot600, который обеспечит достаточно малую задержку. Отличаются от аналогичных ESC низкой ценой при соответствии заявленным характеристикам. Рассчитаны на аккумулятор 3-5S, данное напряжение подходит для питания выбранных двигателей. Стоит отметить, что у выбранных ESC отсутствует BEC, поэтому стоит учитывать это при выборе полетного контроллера, в нем должна быть плата распределения питания со стабилизаторами напряжения на 5В и 12В или потребуется отдельная плата распределения питания.
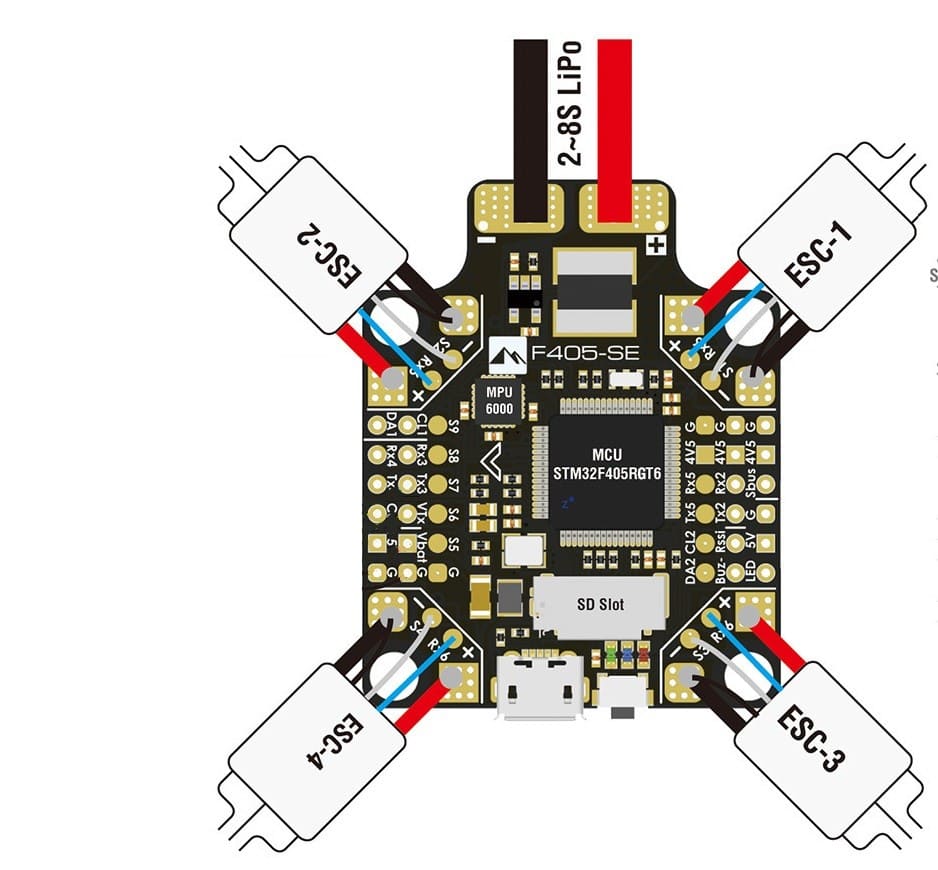
Рисунок 7 – Cхема подключения ESC к полетному контроллеру
Для продолжительности полета в 30-40 минут потребуется Li-Po аккумулятор ёмокостью 5200 мАч и состоящая из четырех ячеек, чтобы выдавать расчетное напряжение для двигателей 14,8В. Также можно собрать АКБ из четырех Li-Ion элементов 18650. Это увеличит время полета до десяти минут.
Наиболее подходящим вариантом ПК для осуществления автоматического управления будут устройства на базе STM32F4 и STM32F7. Последнее поколение имеет лучшие характеристики, но STM32F4 обладает достаточным объемом флеш-памяти и тактовой частотой для решения всех необходимых задач. Для дипломной работы подойдет полетный контроллер Matek F405-SE. Это обновленная версия Matek F405-СTR, имеющая современный барометр с повышенной чувствительностью DPS310, 6 UART портов (один из которых инвертирован для работы по протоколу SBUS), 2 порта I2C. Совмещенным модулем гироскопа и акселерометра является надежный MPU6000, дающий показания с минимальным количеством помех. ПК имеет встроенную плату распределения питания со стабилизированными выходами питания 5В и 12В, встроенную плату OSD. Matek F405-SE отлично подходит для автоматических полетов, прошивка INAV будет являться лучшим программным обеспечением.
В качестве модуля GPS будет использоваться Мatek M8Q-5883. Он обладает лучшим качеством и надежностью, малым весом, оснащен подлинным чипом u-blox SAM M8Q. Имеет стабилизатор 3.3В с низким уровнем шума и радиочастотный фильтр, а также встроенный магнитометр QMC5883L. Может использовать системы ГЛОНАСС и GPS одновременно для более точного позиционирования. Для установки потребуется держатель модуля GPS, его можно как купить, так и изготовить самостоятельно.
Контакт Rx модуля GPS подключается к контакту Tx полетного контроллера, Tx модуля подключается к контакту Rx ПК, контакты магнитометра CL и DA подключаются к одноименным контактам на ПК.
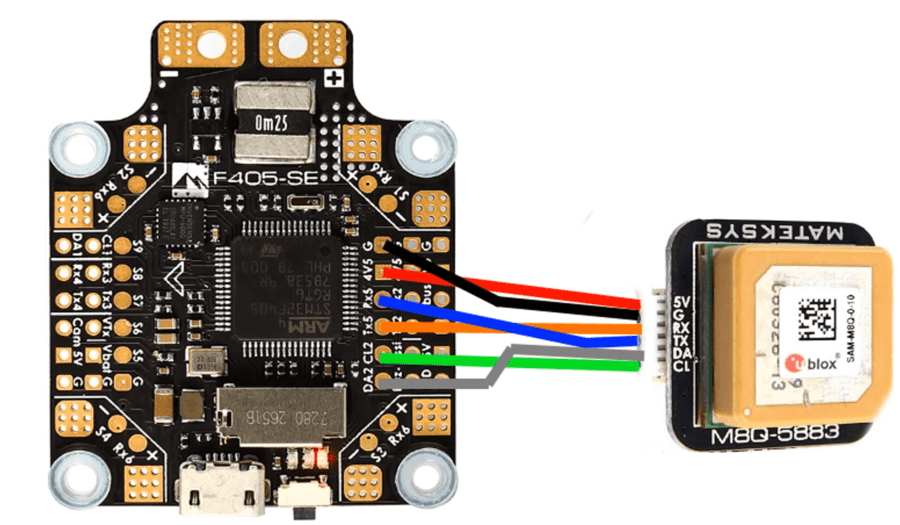
Рисунок 8 – Подключение модуля GPS к полетному контроллеру
В качестве аппаратуры управления выбрана FrSky Taranis QX7 с приемником R-XSR, работающими на частоте 2.4ГГц, имеет 16 каналов и работает по протоколам SBUS, CPPM. Данное оборудование позволяет управлять квадрокоптером на дальности 3-5 км, возможна установка усилителя для передатчика, который позволяет добиться дальности передачи сигналов до 8 км.
Касаемо FPV оборудования, работающего на частоте 5.8ГГц, для дипломной работы будет использоваться видеопередатчик AKK FX2 Ultimate Mini мощностью 600 мВт, позволяющий передавать видеосигнал на расстояние до 7 км. Для него потребуется антенна UFOFPV Pagoda-2 с разъемом SMA. Камера RunCam Phoenix 2, имеющая отличное горизонтальное разрешение 1000TVL, хорошо работает при недостаточном освещении. Для приема видеосигнала потребуется монитор со встроенным видеоприемником LT58025 5.8ГГц с диагональю экрана 7 дюймов. Данный монитор имеет встроенный аккумулятор, принимает до 40 каналов, является доступной заменой FPV очков.

Рисунок 9 —Движение винтов квадрокоптера
(анимация: 8 кадров, 5 циклов повторения, 44 килобайт)
Выводы
В данной работе были приведены основные критерии выбора всех деталей квадрокоптера, разработана аппаратура управления для квадрокоптера, позволяющая производить управление летательным аппаратом на аналогичном уровне с аппаратурами управления промышленного изготовления, а также подобраны комплектующие для сборки квадрокоптера с развитой системой автоматических полетов, отличными динамическими характеристиками и времени полета.
Список источников
1. Мультикоптеры: Новый Вид. [Электронный ресурс]. - Режим доступа: www.uav.ru
2. Набиев Р.Н., Газарханов А.Т., Гараев Г.И., Ширинов У.Т., Гамидли Ф.Ф.Методы использования мультикоптера в военных целях// №1, Статьи Националной Авиационной Академии, 2015. Ст. 21-28
3. Контроллеры бесколлекторных двигателей. [Электронный ресурс]. – Режим доступа:www.multicopter.ru
4. Ситников Д.В., Бурьян Ю.А., Русских Г.С. Система управления движением мультикоптера.- Омск.:Омский государственный технический университет. Монография, 2012, 5c.
5. Селиванова Л.М., Шевцова Е.В. Инерциальные навигационные системы, Часть1. Одноканальные инерциальные навигационные системы. - М.:2012, 49с.
6. Соловьев В.И., ШабаловП.Г. Инерциальные навигационные системы.-Самара.: 2011,74с.
7. Multicopter Wiki [Электронный ресурс]. – Режим доступа:https://multicopterwiki.ru/index.php