
Abstract on the topic of graduation work
- Introduction
- 1. Anthropomorphic robots
- 1.1 Basic concepts and structure
- 1.2 Functions and capabilities of anthropomorphic robots
- 2. Robot control
- 2.1 Hardware
- 2.2 Overall view of the robot and its purpose
- 3. Programming in Arduino
- Conclusions
- Source List
Introduction
Robotics is one of the most promising and fastest growing branches of engineering today. It combines control systems, mechanics and artificial intelligence - the areas that are developing most rapidly today. Therefore, this field is one of the most important components of scientific and technological progress in the near future.
A robot is primarily designed to help humans, to perform laborious, monotonous or dangerous, for human health and life, work. They are gradually being introduced into our lives and our everyday lives. Already now robots are working in the home - robotic vacuum cleaners, lawn mowers, robots for watering, in industry - robots for welding, painting, sorting warehouses, on battlefields - robots for demining and ammunition delivery.
Literally 10 years ago, robotics had a fairly high threshold of entry, so it could not be practiced by schoolchildren, teenagers, even students could have problems. This is due to the fact that on the market of radio electronic components were mostly expensive specialized microprocessors, and the documentation for them was to the teeth of only a qualified engineer. But today the market is oversaturated with various microprocessors, sensors, actuators and much more to create your own robot, and the Internet has a large number of video tutorials and text guides on robotics with illustrative images. There are also ready-made kits for assembling your own robot, which are not much different from a conventional construction kit.
The basics of robotics are already being taught in schools today. In middle and high school, students learn about design, programming, and algorithm theory. These classes are primarily aimed at developing a young generation's interest in programming and engineering. If a teenager decides to pursue robotics later in life, it will be much easier for him or her, because the foundation was learned in school.
Mankind has long appreciated the importance of robotics development, so many developing countries have universities that train young engineers, specialists in electronics, robotics, mechatronics and other related industries. Also, enterprises and scientific centers are being built and developed for the development, adjustment and production of various robots. All the world's corporations not only use robots, but also develop them themselves, realizing the great potential they hold.
1. Anthropomorphic robots
1.1 Basic concepts and structure
An anthropomorphic robot is a robot that has a similar structure and features to humans.
An anthropomorphic robot is a very complex combination of locomotor system, its balancing system, and neural networks capable of processing and understanding the environment and voice commands. All of these components have been implemented separately in a large number of scientific projects, but at this stage no company has managed to combine them all in one robot and make it extremely similar to a human.
The framework of anthropomorphic robots consists of metal structures that have a higher safety margin than human bone and tissue. Some robots have a scanning lidar, an optical sensor in the head that creates a two- or three-dimensional picture of their surroundings.
Anthropomorphic robots can be divided into:
– service
– research
Service robots are designed to perform routine work, including housework. In addition to robot vacuum cleaners, they also include robots that look like humans - anthropomorphic robots. There are also those that are indistinguishable from humans even in small details - androids. They can be equipped with organs of biological origin for the greatest similarity to humans, or artificial, not inferior in similarity. They have skin, characteristic features of the face and body, often made in the image of a single person, as well as the simplest facial expressions. Thanks to all this, they look extremely similar to a living person.

Figure 1 – A humanoid robot artist from the UK
Research robots, unlike their service counterparts, are more like a metal skeleton that looks remotely human. They have the same two legs for locomotion, two arms for performing various tasks, and a head that houses various sensors to sense the environment.
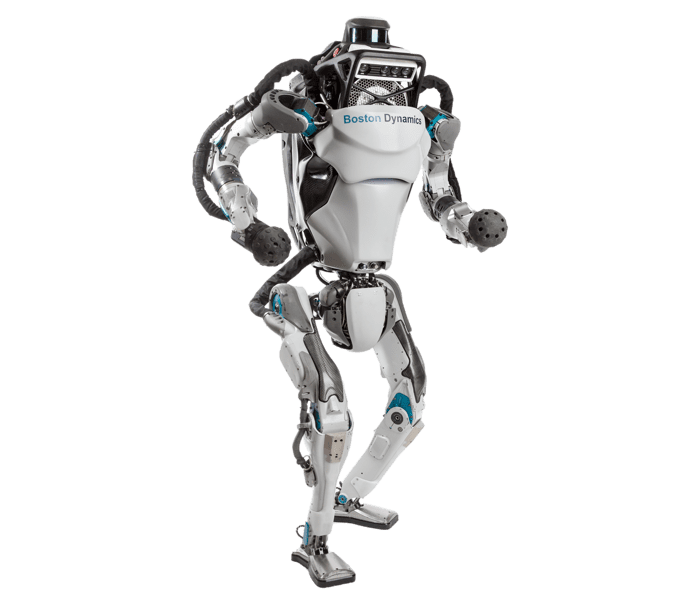
Figure 2 – The Atlas robot from BostonDynamics
Thanks to their structure, anthropomorphic robots can perform all the same functions as humans. For this purpose, the robot is equipped with its own intelligent system. Often, this system works according to a pre-determined program. With the development of technology, particularly artificial intelligence, we may see robots that can think for themselves and make informed decisions.
1.2 Functions and capabilities of anthropomorphic robots
Our world is adapted for human convenience, so only humanoid robots will be able to function freely in it. With humanoid robots, there is no need to change the familiar environment. Where an ordinary human walks, a robot similar to him will pass through. For example, for a robot of a different design to work in an existing building, it would have to be rebuilt - remove thresholds, replace flooring, doors and so on. Due to the absence of costs for changing the environment, the use of an anthropomorphic robot will be economically justified. Analysts expect service robots to develop faster than their industrial counterparts. This is due to the fact that the market for industrial robots designed for one specific task is already established, while universal humanoid robots are a novelty and the market for such devices is still forming.
A service robot from the android class, due to its external similarity to humans, can be used in the service industry, as a counselor or voice assistant, performing exactly the same functions as a human. Accurate imitation of human appearance is essential when working with people. The emotions that the robot is able to express play a special role, a psychological move designed to smooth the robot's attitude so that people see it as a friend and helper.
Unfortunately, the functions of anthropomorphic robots with a high level of human face and body similarity end there. The reason for this is the general concept of the service robot class. In the future, the accuracy of human body copying can be increased and artificial intelligence can be improved for more accurate and faster interaction with humans. Developers have been able to replicate human appearance, voice, facial expressions and more, but such robots are usually extremely expensive stationary objects that are a demonstration development or promotional project.
Research robots compare favorably to service robots in that they don't need to replicate a human in detail. This allows for stronger design, greater autonomy, and much easier access to various systems to test and adjust them. Research robots are more promising than androids - they are the kind of robots on which all the latest technologies are tested.
These robots cannot be programmed for a specific task, they can only be trained. For this purpose, reinforcement learning is used. In this method, the robot learns by interacting with the environment. The program can only specify that "collision with an obstacle is bad". The robot stumbles and falls at first. But later, it will recognize the object in front of it as an obstacle and will look for a route to overcome it. It is also possible to apply the concept of combined intelligence, when the robot is faced with an unsolvable task and the operator intervenes in the control. The robot memorizes the operator's action, accumulates data and will solve this task independently in the future. Next-generation robots will not need to be trained again - the accumulated data will be transferred to new models.
They have a good chance of being put into mass production, no longer being a research platform. At the moment, the algorithms of movement are being actively worked out: building a route, overcoming obstacles, running, etc. Robots of this class have already managed to work in space instead of humans and turned out to be very convenient: instead of hours of preparation for going into airless space and the limited time a human is able to spend in a spacesuit, the robot can stay for hours or even days in space while the operator controls it at a convenient time from the spacecraft.
It is envisioned that in the future such robots will be the first to be sent to Mars and will do all the preparatory work for establishing a human colony.

Figure 3 — Boston Dynamics robot
(animation: 8 frames, 5 repetition cycles, 129 kilobytes)
2. Robot control
2.1 Hardware
The "brain" of the Otto robot is the ArduinoNano microcontroller. The Arduino Nano is a compact microelectronic prototyping platform designed for use with a breadboard. It can also be mounted on an expansion board (shield)
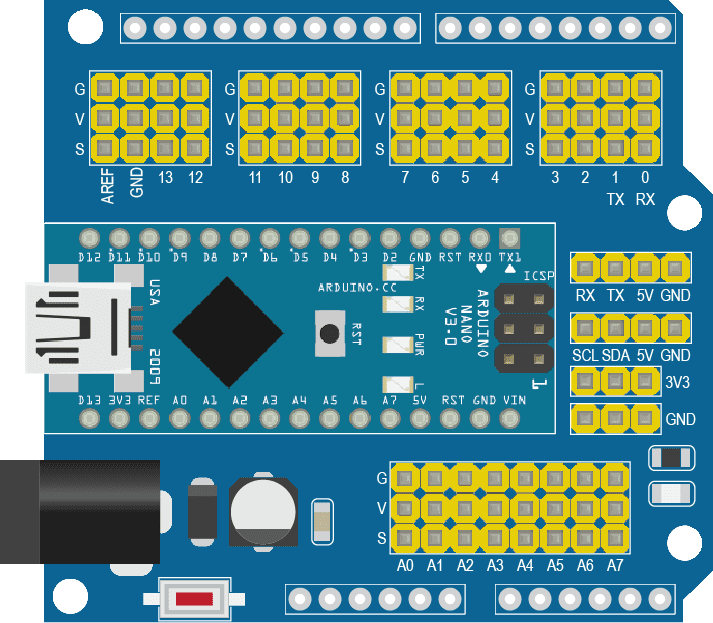
Figure 4 – ArduinoNanoV3.0 на плате расширения
The Nano has many of the same features as the Uno, differing only in board size and the lack of a separate power connector.
The board is powered via miniUSB or microUSB when connected to a computer. It is also possible to connect to an external power supply that has a low ripple voltage of 6V to 20V.
A single dual channel L9110S driver is used to control the motors. This driver is common among radio amateurs for use in simple robotics systems.
There are two L9110 chips on its board that allow you to control two DC consumers, in our case two motors. It is also possible to control the speed and direction of rotation of the motor.
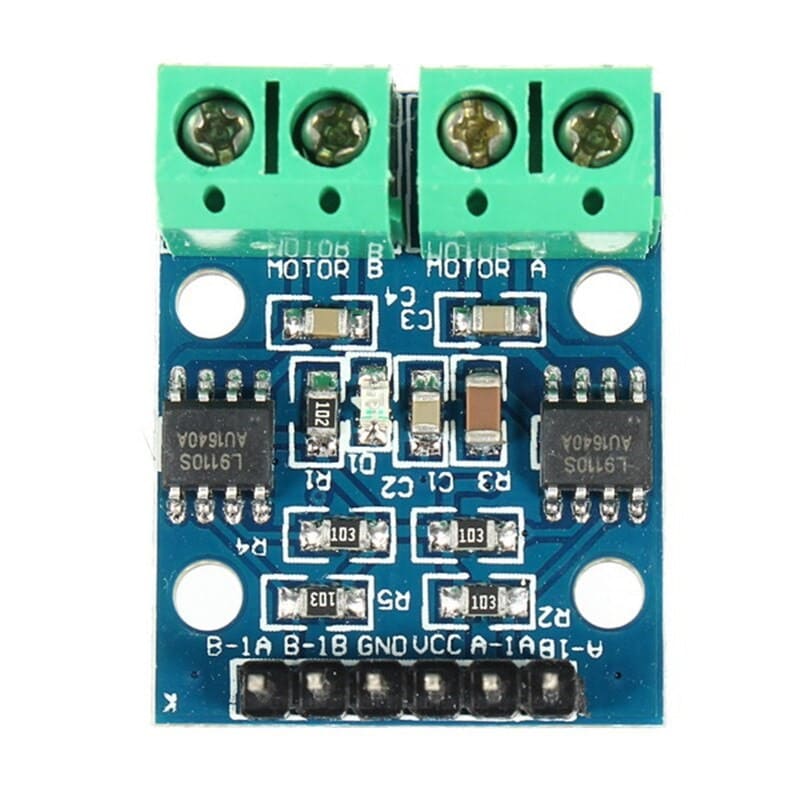
Figure 5 – Driver L9110S
We will use two DC gearmotors -GA12-N20 as the propulsor of our platform. Electric motors of this type have many variants, the main difference between them - gearboxes with different gear ratio. Input voltage - from 3 to 12 V. The nominal supply voltage is 6V, at which it is possible to achieve the highest efficiency of the motor. Two Li-ion batteries of 3.7V each are used as the power supply.
GA12-N20 is a widely used motor among radio amateurs, which is used to build lightweight moving carts.

Figure 6 – Motor with gearbox GA12-N20
By its type, the GA12-N20 electric motor is a DC collector machine of low power. The armature axles are mounted on specialized bushings, which play the role of plain bearings. Conductive brushes are made in the form of two plates. The main applications are low-power drives for various household appliances, as well as children's toys and moving robotic platforms.
The motors of this type are characterized by simple construction, simple control of rotation speed (voltage-dependent) and change of rotation direction.
The GA12-N20 electric motor is too weak to transmit torque directly from the shaft to the drive wheel, so it is equipped with a gearbox. The gearbox reduces the speed of the motor and increases the torque output. The higher the gear ratio, the lower the output speed, but the higher the torque.
For this project, a GA12-N20 electric motor with a speed of 150 rpm was selected. This low motor speed was chosen on the basis that a fairly lightweight robot on the Otto platform does not need a high travel speed. At the same time, higher torque will be achieved at lower speeds.
2.2 Overall view of the robot and its purpose
The concept of the Otto robot suggests that it can be assembled from simple and inexpensive components using 3D printing to create the body and moving elements. It's also worth considering that the bulk of the audience are novice radio amateurs who don't have much knowledge of 3D modeling or professional 3D printing equipment. This means that the parts should not have complex geometry to be modeled and printed.
To summarize, the enclosure is designed as a box with a removable top half for easy access to electronic components. There are two rollers on each side, one of which is the drive roller and the other is the guide roller. The caterpillar belt is put on top of the rollers (not present on the 3D model) and fastened with a hinge. The removable upper half has two holes that can be used to install an ultrasonic distance sensor.
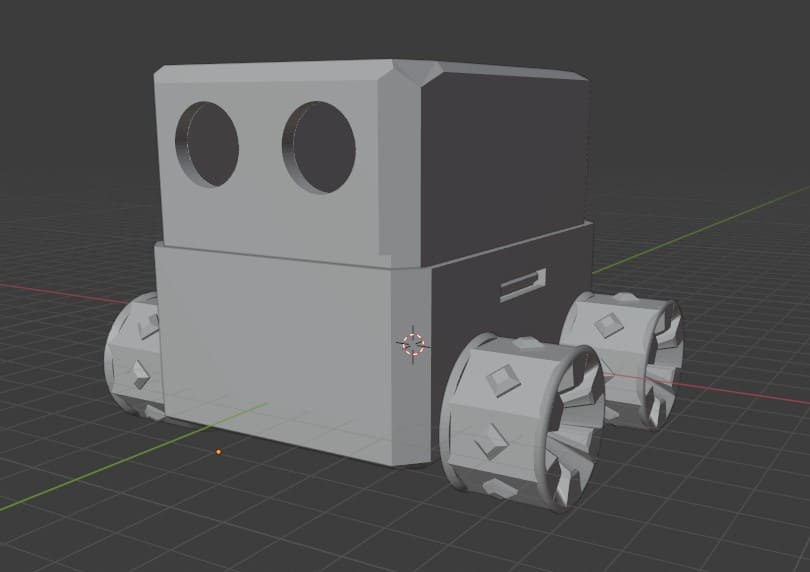
Figure 7 – General view of the Otto robot without caterpillar belt
The main purpose of the Otto robot as a mobile platform is to teach basic skills of working with robotic complexes, development and adjustment of algorithms for their movement. The platform is universal, i.e. electronic components under the ArduinoNano microcontroller can be replaced with adjacent ones, as well as the microcontroller itself. The only limitation is the small internal volume.
3. Programming in Arduino
The Arduino IDE, which supports C and C++ with special code structuring rules, is used to create your own program to control the Otto robot. The application is completely free, which makes it convenient for learning how to use microprocessor technology.
Arduino IDE allows users to create their own programs in the built-in text editor, compile them into machine code, and upload them to various microprocessors. In addition to the standard Arduino UNO,NANO and MEGA, this development environment supports ESP32, ESP8266 and Attiny microcontrollers. The programs created and written for Arduino boards are called sketches.
A sketch is a program developed in the Arduino IDE. A sketch is created in a text editor that has built-in tools for inserting and cutting, as well as searching and replacing text. When you save the sketch, the text with explanations and error messages, if any, appear at the bottom of the program window.
The Arduino IDE is relatively easy to learn, based on a simplified version of the C++ programming language that uses predefined functions.
Two libraries are used in our sketch: PS2X_lib and GyverMotor.
The PS2X_lib library is designed to integrate commands and functions related to the gamepad used to control the robot into the sketch. It allows you to customize various gamepad buttons and sticks for specific actions. For example, the stick can be used to control the robot in a tank-like pattern.
The GyverMotor library is designed for easy control of small electric motors. It supports a large number of motor drivers that are based on the H-bridge principle, allows convenient control of the direction and speed of the motor, and can limit the minimum signal that should be applied to it. This library was chosen due to the presence of well-structured documentation in Russian, which makes it easy to work with it.
Conclusions
The paper presented control algorithms for an Otto robot with a dual-motor electric drive and a tracked chassis.
The ArduinoNANO microcontroller was chosen to control and realize the task. The components necessary for the movement of the robot were selected and the circuit diagram of the moving robot was drawn up. Wheels and caterpillar belts for realization of the tank control scheme were designed and created with the help of 3D printing technology. The robot is driven by two DC motors. The motors are controlled by a driver that operates on the H-bridge principle.
Source List
1. Антропоморфные роботы [Electronic resource]. - Access mode: https://skillbox.ru/media/business/razbiraem-mirovoy-rynok-antropomorfnykh-robotov/
2. ArduinoNANO: характеристики, схемы, подключение [Electronic resource]. – Access mode:http://arduino-nano.ru/
3. Драйвер двигателя L9110S [Electronic resource]. – Access mode:https://3d-diy.ru/wiki/arduino-moduli/drajver-dvigatelya-l9110s/
4. Инкрементальный энкодер: что это такое, принцип работы [Electronic resource]. – Access mode:https://techtrends.ru/resources/articles/inkrementalnyy-enkoder/
5. Гусеничный движитель [Electronic resource]. – Access mode:https://ustroistvo-avtomobilya.ru/shiny-i-diski/gusenichny-j-dvizhitel/
6. Среда разработки ArduinoIDE [Electronic resource]. – Access mode:https://arduino.ru/Arduino_environment
7. Безопасность жизнедеятельности на производстве [Electronic resource]. – Access mode:https://ohrana-bgd.ru/wiki/category-wiki/bzhd/bezopasnost-zhiznedeyatelnosti-na-proizvodstve/