
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Антропоморфные роботы
- 1.1 Основные понятия и строение
- 1.2 Функции и возможности антропоморфных роботов
- 2. Управление роботом
- 2.1 Оборудование
- 2.2 Общий вид робота и его предназначение
- 3. Программирование в Arduino
- Выводы
- Список источников
Введение
Робототехника на сегодняшний день является одной из самых перспективных и быстрорастущих отраслей инженерии. В ней соединяются воедино системы управления, механика и искусственный интеллект – именно те направления, которые развиваются активнее всего в наше время. Поэтому, данная сфера является одной из важнейших составляющих научно-технического прогресса в недалёком будущем.
Робот в первую очередь создан для того, чтобы помогать человеку, выполнять кропотливую, монотонную или опасную, для здоровья и жизни человека, работу. Они постепенно внедряются в нашу жизнь и в наш быт. Уже сейчас роботы трудятся в быту – роботизированные пылесосы, газонокосилки, роботы для полива, в промышленности – роботы для сварки, покрасочных работ, сортировки складских помещений, на полях сражений – роботы для разминирования и доставки боеприпасов.
Ещё буквально 10 лет назад робототехника имела достаточно высокий порог вхождения, в связи с чем ею не могли заниматься школьники, подростки, даже у студентов могли возникнуть проблемы. Это связано с тем, что на рынке радиоэлектронных компонентов присутствовали по большей части дорогие специализированные микропроцессоры, а документация к ним была по зубам разве что квалифицированному инженеру. Но уже сегодня рынок перенасыщен различными микропроцессорами, датчиками, приводами и многим другим для создания своего собственного робота, а в сети Интернет присутствует большое количество видео-уроков и текстовых гайдов по робототехнике с наглядными изображениями. Также существуют уже готовые комплекты для сборки собственного робота, которые по сложности сборки мало чем отличаются от обычного конструктора.
Основы робототехники уже сегодня преподают в школах. В средних и старших классах школьники изучают конструирование, программирование и теорию алгоритмов. Эти занятия направлены в первую очередь на выработку у молодого поколения интереса к программированию и инженерным наукам. Если подросток решит заниматься робототехникой в дальнейшем – ему будет гораздо легче, ведь базис был получен при обучении в школе.
Человечество давно оценило важность развития робототехники, поэтому во многих развивающихся странах есть университеты, которые готовят молодых инженеров, специалистов в области электроники, робототехники, мехатроники и других смежных отраслях. Также строятся и развиваются предприятия и научные центры для разработки, наладки и производства различных роботов. Все мировые корпорации не только используют роботов, но и сами занимаются их разработкой, понимая, какой большой потенциал в них заложен.
1. Антропоморфные роботы
1.1 Основные понятия и строение
Антропоморфный робот – робот, имеющий схожее с человеком строение и аналогичные особенности.
Антропоморфный робот представляет из себя очень сложную совокупность опорно-двигательного аппарата, системы его балансировки, а также нейросетей, способных обрабатывать и понимать окружающую обстановку и голосовые команды. Все эти составляющие по отдельности реализованы в большом количестве научных проектов, но на данном этапе ни одной компании не удалось объединить всё в одном роботе и к тому же сделать его предельно схожим с человеком.
Каркас антропоморфных роботов состоят из металлических конструкций, которые обладают более высоким запасом прочности, нежели человеческие кости и ткани. У некоторых роботов в головной части установлен сканирующий лидар –оптический датчик, который формирует двухмерную или трёхмерную картину окружающего пространства.
Можно условно разделить антропоморфных роботов на:
– сервисные
– исследовательские
Сервисные роботы предназначены для выполнения рутинной работы, в том числе работы по дому. Помимо роботов-пылесосов, в их число входят и роботы, похожие на человека – антропоморфные. Существуют и такие, которые неотличимы от человека даже в мелочах – андроиды. Они могут оснащаться органами биологического происхождения для наибольшей схожести с человеком, или же искусственными, не уступающими по схожести. Обладают кожей, характерными чертами лица и тела, зачастую выполненными по образу отдельно взятого человека, а также простейшей мимикой. Благодаря всему этому, внешне они крайне похожи на живого человека.

Рисунок 1 – Человекоподобный робот-художник из Великобритании
Исследовательские роботы, в отличие от сервисных коллег, больше напоминают металлический скелет, отдалённо похожий на человека. При этом такие роботы имеют всё те же две ноги для передвижения, две руки для выполнения различных задач и голову, в которой располагаются различные датчики и сенсоры для восприятия окружающей среды.
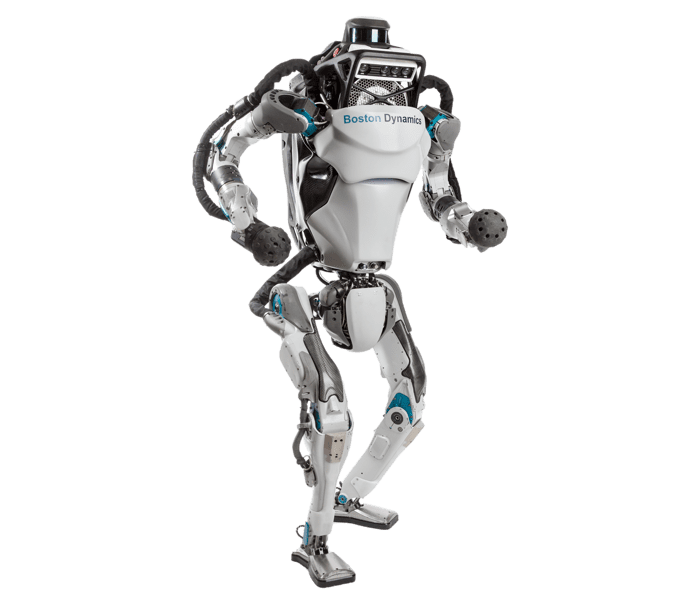
Рисунок 2 – Робот Atlas от компании BostonDynamics
Благодаря своему строению, антропоморфные роботы могут выполнять все те же функции, что и человек. Для этого робот оснащается собственной интеллектуальной системой. Зачастую, такая система работает по заранее составленной программе. С развитием технологий, в частности искусственного интеллекта, в дальнейшем мы сможем увидеть роботов, которые смогут самостоятельно мыслить и принимать взвешенные решения.
1.2 Функции и возможности антропоморфных роботов
Наш мир приспособлен для удобства людей, поэтому свободно функционировать в нём смогут только гуманоидные роботы. При использовании человекоподобных роботов не требуется менять привычную обстановку. Где проходит обычный человек – там пройдёт и подобный ему робот. Например, чтобы робот иной конструкции мог работать в существующем здании, придётся перестроить его — убрать пороги, заменить напольное покрытие, двери и так далее. За счёт отсутствия затрат на изменение среды, использование антропоморфного робота будет экономически оправданно. Аналитики ожидают, что сервисные роботы будут развиваться быстрее своих промышленных коллег. Это связано с тем, что рынок промышленных роботов, предназначенных для одной конкретной задачи, уже устоялся, в то время как универсальные гуманоидные роботы являются новинкой и рынок таких устройств продолжает формироваться.
Сервисный робот из класса андроидов, благодаря своей внешней схожести с человеком, может использоваться в сфере обслуживания, в качестве консультанта или голосового помощника, выполняя ровно те же функции, что и человек. Точная имитация человеческой внешности крайне необходима при работе с людьми. Особую роль играют эмоции, которые робот способен выражать – этот психологический ход призван сгладить отношение к роботу, чтобы человек воспринимал его как друга и помощника.
К сожалению, функции антропоморфных роботов с высоким уровнем подобия человеческого лица и тела на этом заканчиваются. Причиной тому – общая концепция класса сервисных роботов. В дальнейшем может быть увеличена точность копирования человеческого тела и улучшен искусственный интеллект для более точного и быстрого взаимодействия с человеком. Разработчикам удалось воспроизвести внешность человека, голос, мимику и многое другое, но такие роботы обычно являются чрезвычайно дорогими стационарными объектами, представляющими из себя демонстративную разработку или промо-проект.
Исследовательские роботы выгодно отличаются от сервисных тем, что им не нужно детально копировать человека. Это позволяет усиливать конструкцию, увеличивать автономность и даёт куда более простой доступ к различным системам для их проверки и наладки. Исследовательские роботы являются более перспективными, чем андроиды – именно на таких образцах робототехники обкатываются все новейшие технологии.
Таких роботов невозможно запрограммировать под конкретную задачу, их можно только обучить. Для этого применяется обучение с подкреплением. При нём робот обучается, взаимодействуя с окружающей средой. В программе можно лишь указать, что «столкновение с препятствием – плохо». Робот поначалу спотыкается и падает. Но в дальнейшем, он распознает объект перед собой, как препятствие и будет искать маршрут для его преодоления. Также возможно применение концепции комбинированного интеллекта, когда робот сталкивается с нерешаемой для него задачей и в управление вмешивается оператор. Робот запоминает действие оператора, накапливает данные и в дальнейшем будет решать эту задачу самостоятельно. Роботов следующего поколения не понадобится обучать заново – накопленные данные будут переноситься на новые модели.
Они имеют все шансы быть запущенными в серийное производство, перестав быть исследовательской платформой. На данный момент активно отрабатываются алгоритмы передвижения: построение маршрута, преодоление препятствий, бег и т.д. Роботы данного класса уже успели поработать в космосе вместо человека и оказались весьма удобны: вместо часов подготовки к выходу в безвоздушное пространство и ограниченного времени, которое человек способен провести в скафандре, робот может находиться часами или даже сутками в космосе, пока оператор управляет им в удобное время с космического корабля.
Предполагается, что в будущем именно такие роботы первыми будут отправлены на Марс и займутся всеми подготовительными работами для обустройства человеческой колонии.

Рисунок 3 — Робот фирмы Boston Dynamics
(анимация: 8 кадров, 5 циклов повторения, 129 килобайт)
2. Управление роботом
2.1 Оборудование
В качестве «мозга» робота Otto выступает микроконтроллер ArduinoNano. Arduino Nano – компактная платформа для прототипирования микроэлектронных устройств, предназначенная для использования с макетной платой. Также её можно установить на плату расширения (shield)
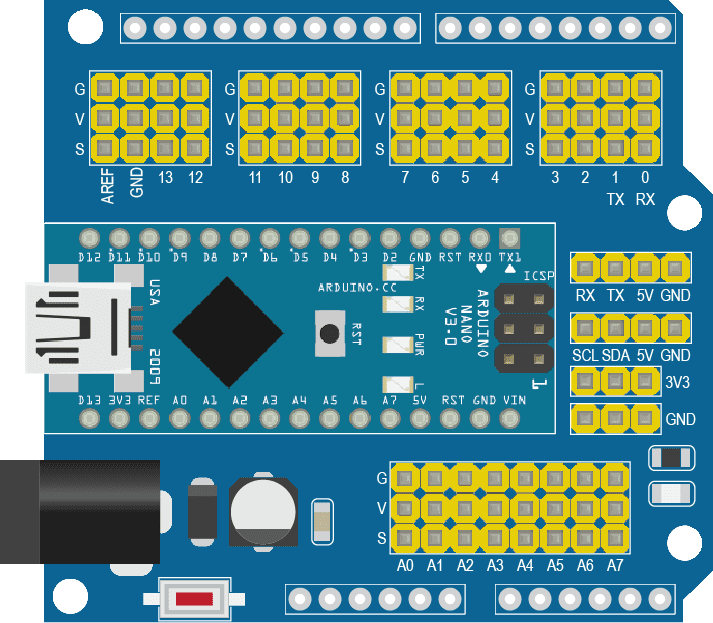
Рисунок 4 – ArduinoNanoV3.0 на плате расширения
Функционал модели Nano во многом схож с Uno и отличается от нее лишь размерами платы и отсутствием отдельного разъема для питания.
Плата питается через miniUSB или microUSB при подключении к компьютеру. Также возможно подключение к внешнему источнику питания, который имеет напряжение от 6 до 20В с низким уровнем пульсаций.
Для управления двигателями используется один двухканальный драйвер L9110S. Данный драйвер распространён среди радиолюбителей для использования в простых робототехнических комплексах.
На его плате установлены два чипа L9110, которые позволяют управлять двумя потребителями постоянного тока, в нашем случае – двумя электродвигателями. Также имеется возможность управлять скоростью и направлением вращения двигателя.
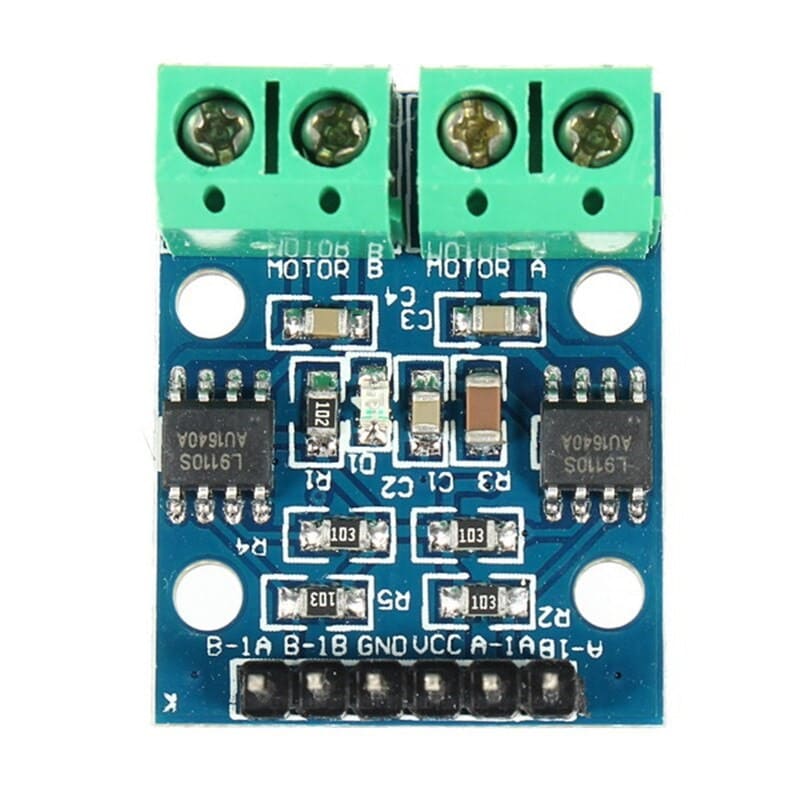
Рисунок 5 – Драйвер L9110S
В качестве движителя нашей платформы будем использовать два мотор-редуктора постоянного тока –GA12-N20. Электродвигатели данного типа имеют множество вариантов, основное отличие между которыми – редукторы с различным передаточным числом. Входное напряжение – от 3 до 12 В. Номинальное напряжение питания – 6В, при нём можно достичь наибольшего КПД двигателя. В качестве источника питания используются два литий-ионных аккумулятора по 3,7В каждый.
GA12-N20 – это широко распространённый электродвигатель среди радиолюбителей, который используется для постройки лёгких подвижных тележек.

Рисунок 6 – Двигатель с редуктором GA12-N20
По своему типу электродвигатель GA12-N20 является коллекторной машиной постоянного тока небольшой мощности. Оси якоря устанавливаются на специализированные втулки, которые играют роль подшипников скольжения. Токопроводящие щетки выполнены в виде двух пластин. Основная сфера применения – маломощные приводы для различных бытовых приборов, а также детские игрушки и подвижные роботизированные платформы.
Двигатели данного типа отличаются простотой конструкции, простым управлением скорости вращения (зависит от напряжения) и изменением его направления.
Электродвигатель GA12-N20 слишком слаб, чтобы передавать крутящий момент напрямую от вала на ведущее колесо, поэтому он снабжается редуктором. Редуктор понижает скорость вращения электродвигателя и увеличивает крутящий момент на выходе. Чем больше передаточное число, тем меньше скорость вращения на выходе, но больше крутящий момент.
Для данного проекта был выбран электродвигатель GA12-N20 со скоростью вращения 150 об/мин. Такая низкая скорость вращения двигателя была выбрана на основе того, что достаточно лёгкий робот на платформе Otto не нуждается в высокой скорости передвижения. При том, при меньшей скорости будет достигнут выше крутящий момент.
2.2 Общий вид робота и его предназначение
Концепция робота Otto предполагает, что он может быть собран из простых и недорогих комплектующих с использованием 3D печати для создания корпуса и подвижных элементов. Стоит также учитывать, что основная часть аудитории – начинающие радиолюбители, которые не обладают достаточными знаниями в 3D моделировании, а также профессиональным оборудованием для 3Dпечати. Это значит, что детали не должны иметь сложной геометрии, которую предстоит моделировать и печатать.
Как итог – корпус выполнен в виде короба со съёмной верхней половиной для удобного доступа к электронным комплектующим. На каждом борту располагаются по два катка, один из которых является ведущим, второй – направляющим. Сверху на катки одевается гусеничная лента (на 3D модели отсутствует) и закрепляется шарниром. В съёмной верхней половине имеются два отверстия, которые могут быть использованы для установки ультразвукового датчика расстояния.
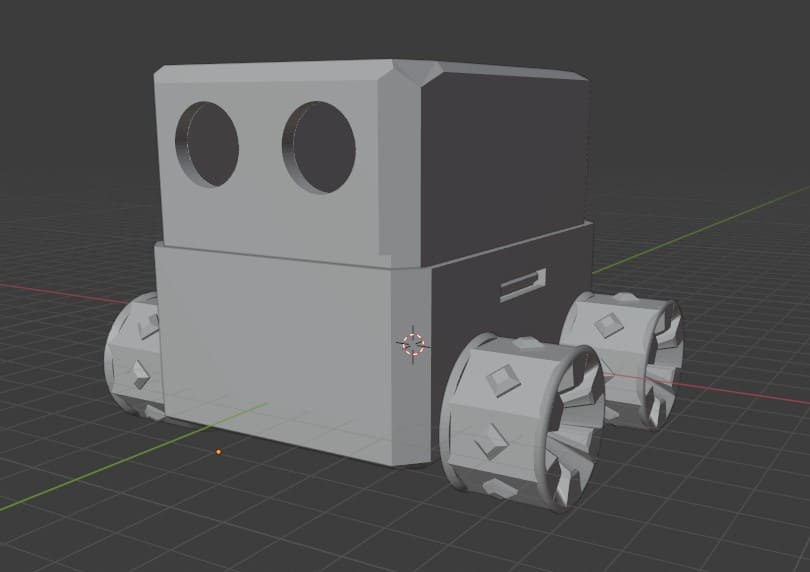
Рисунок 7 – Общий вид робота Otto без гусеничной ленты
Основное назначение робота Otto, как подвижной платформы, - обучение базовым навыкам работы с роботизированными комплексами, разработки и наладки алгоритмов их передвижения. Платформа является универсальной, т.е. электронные компоненты под микроконтроллер ArduinoNano могут быть заменены на смежные, как и сам микроконтроллер. Единственное ограничение – небольшой внутренний объем.
3. Программирование в Arduino
Для создания своей программы для управления роботом Otto используется среда разработки Arduino IDE, которая поддерживает языки C и C++ с использованием специальных правил структурирования кода. Приложение является полностью бесплатным, что делает его удобным для обучения работы с микропроцессорной техникой.
Arduino IDE позволяет пользователю создавать собственные программы во встроенном текстовом редакторе, компилировать их в машинный код, и загружать на различные микропроцессоры. Помимо стандартных Arduino UNO,NANO и MEGA, данная среда разработки поддерживает работу с микроконтроллерами ESP32, ESP8266 и семейством Attiny. Программы, созданные и написанные для плат Arduino, называются скетчами.
Скетч – это программа, разработанная в среде Arduino IDE. Скетч создается в текстовом редакторе, в который встроены инструменты вставки и вырезки, а также поиска и замены текста. При сохранении скетча, в нижней части окна программы появляется текст с пояснениями и сообщения об ошибках, если такие имеются.
Интерфейс Arduino IDE сравнительно прост в освоении, его основой является упрощенная версия языка программирования C++, использующая предопределенные функции.
В нашем скетче используется две библиотеки: PS2X_lib и GyverMotor.
Библиотека PS2X_lib предназначена для интеграции в скетч команд и функций, связанных с геймпадом, с помощью которого ведётся управление роботом. Она позволяет настроить различные кнопки геймпада и стики под определённые действия. В частности, с помощью стика осуществляется управление по танковой схеме.
Библиотека GyverMotor предназначена для удобного управления малыми электродвигателями. Она поддерживает большое количество драйверов двигателя, которые построены по принципу Н-моста, позволяет удобно управлять направлением и скоростью вращения электродвигателя, а также может ограничивать минимальный сигнал, который следует на него подать. Данная библиотека была выбрана благодаря наличию хорошо структурированной документации на русском языке, что облегчает работу с ней.
Выводы
В работе были представлены алгоритмы управления робота Otto с двухдвигательным электроприводом и гусеничным шасси.
Для управления и реализации поставленной задачи был выбран микроконтроллер ArduinoNANO. Выбраны необходимые для движения робота комплектующие и составлена принципиальная схема подвижного робота. Спроектированы и созданы с помощью технологии 3D печати колёса и гусеничные ленты для реализации танковой схемы управления. Робот приводится в движение двумя двигателями постоянного тока. Управление двигателями осуществляется с помощью драйвера, который работает по принципу Н-моста.
Список источников
1. Антропоморфные роботы [Электронный ресурс]. - Режим доступа: https://skillbox.ru/media/business/razbiraem-mirovoy-rynok-antropomorfnykh-robotov/
2. ArduinoNANO: характеристики, схемы, подключение [Электронный ресурс]. – Режим доступа:http://arduino-nano.ru/
3. Драйвер двигателя L9110S [Электронный ресурс]. – Режим доступа:https://3d-diy.ru/wiki/arduino-moduli/drajver-dvigatelya-l9110s/
4. Инкрементальный энкодер: что это такое, принцип работы [Электронный ресурс]. – Режим доступа:https://techtrends.ru/resources/articles/inkrementalnyy-enkoder/
5. Гусеничный движитель [Электронный ресурс]. – Режим доступа:https://ustroistvo-avtomobilya.ru/shiny-i-diski/gusenichny-j-dvizhitel/
6. Среда разработки ArduinoIDE [Электронный ресурс]. – Режим доступа:https://arduino.ru/Arduino_environment
7. Безопасность жизнедеятельности на производстве [Электронный ресурс]. – Режим доступа:https://ohrana-bgd.ru/wiki/category-wiki/bzhd/bezopasnost-zhiznedeyatelnosti-na-proizvodstve/