
Рисунок 1. Схема кинематической цепи:
1 — звено на который действует привод;
3 — выходное звено, все шарниры вращательные
Авторы: Р.А. Мирзаев, О.В. Каменюк.
Источник: Журнал Актуальные проблемы авиации и космонавтики
, 2012 — с. 82–48
Р.А. Мирзаев, О.В. Каменюк Исследование кинематики манипулятора с помощью пакета Simmechanics.
С помощью пакета–расширения SimMechanics, имеющегося в Matlab, исследована кинематика манипулятора. Применен ПИД–регулятор для достижения целевого положения привода, сымитированы возмущающие воздействия на систему. Определены кинематические и динамические параметры движения выходного звена. Имеющиеся данные позволяют определить силовые факторы, действующие на шарниры, звенья, приводы.
В традиционном понимании физическое моделирование подразумевает создание некоторого физического аналога – модели объекта. С развитием компьютерных технологий это представление изменилось. Под физическим моделированием понимают симбиоз математического моделирования и проектирования объекта, подчиняющегося основным физическим принципам [1].
В качестве приводов линейных перемещений звеньев манипулятора могут быть использованы электрические, гидравлические и пневматические приводы [2]. В работе в качестве приводов звеньев рассматриваются серво приводы, использование которых актуально в мехатронике. Смоделирована система управления приводами на основе ПИД–регулятора.
На рис. 1 приведена кинематическая схема манипулятора. На звено 1 действует привод вращательного движения, в результате чего вся кинематическая цепь привходит в движение.
Рисунок 1. Схема кинематической цепи:
1 — звено на который действует привод;
3 — выходное звено, все шарниры вращательные
Блок–схема математической модели, приведенная на рис. 2, включает ПИД–регулятор, данные на который поступают с датчика углового положения (Joint Sensor). Сравнивая поступающее значение с целевым (–4,45 градуса), регулятор в каждый момент времени выдает корректирующее воздействие на систему в виде вращающего момента через привод (Joint Actuator). К выходному звену 3 приложены возмущающие воздействия: циклического и постоянного характера (Sin Wave и Constant на рис. 2).
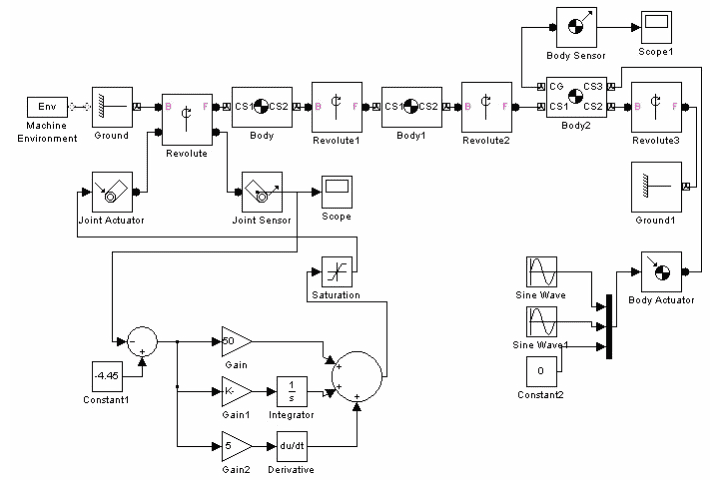
Рисунок 2. Блок–схема математической модели манипулятора.
Body2 — выходное звено; Body — первое
звено; Revolute — цилиндрический шарнир; Joint actuator — привод вращения; Joint sensor — датчик углового перемещения; Body actuator — привод линейных перемещений (используется для имитации возмущающих воздействий); Ground — крепления к неподвижному основанию, Scope — осциллограф
В блок–схеме манипулятора для вывода параметров движения к выходному звену подсоединен датчик (Body Sensor), результат работы которого представлен на рис. 3.
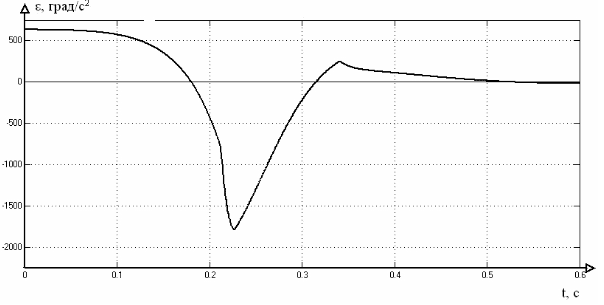
Рисунок 3. Зависимость углового ускорения выходного звена от времени
В работы определены параметры движения выходного звена, (угловая скорость, ускорение). Имеющиеся данные позволяют определить силовые факторы, действующие на шарниры, звенья, приводы.
1. Махов А.А. Моделирование механических систем с помощью пакета расширения SimMechanics http://exponenta.ru/educat/systemat/mahov/simmechanics.asp 2. Герман - Галкин С.Г. Matlab & Simulink. Проектирование мехатронных систем на ПК. М. : Корона-Век, 2008.