
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Общие сведения по шине CAN
- 2. Описание стандарта CAN
- 3. Формирование сообщений CAN
- 4. Использование шины CAN для микроконтроллера STM32F4
- 5. Разработка приёмопередатчика для платформы на базе Arduino
- 6. Применение шины CAN для управления портальным краном
- 7. Выводы
- 8.Список источников
Введение
Робототехника – высокотехнологическая инженерная отрасль, чрезвычайно интенсивно развивающаяся во всех странах.
Робототехнические системы – база автоматизации современной промышленности, транспорта, медицины, космонавтики и других сферах человеческой деятельности.
Шина CAN является обособленной системой электронного оборудования автомобиля. Она служит для обмена данными между подключенными к ней блоками управления. Благодаря особому исполнению и структуре эта система работает очень надежно.
Принципиально шина CAN может работать с одним соединительным проводом!
Однако, систему оснащают вторым соединительным проводом.
По второму проводу сигналы передаются в обратном порядке.
Передача сигналов в обратном порядке помогает подавлению внешних помех.
Шина разработана изначально для использования в автомобилях, а теперь она расширяет сферу своего влияния и на другие области, поэтому она приобретает большую актуальность.
Целью данной работы является создание устройства передачи информации по шине CAN для задач управления электроприводов [1].
1. Общие сведения по шине CAN
Шина CAN – Controller Area Network (сеть контроллеров) – стандарт промышленной сети, ориентированный, прежде всего, на объединение в единую сеть различных дополнительных устройств и датчиков. Режим передачи – последовательный, широковещательный, пакетный. Шина разработана изначально для использования в автомобилях, а теперь она расширяет сферу своего влияния и на другие области, поэтому она приобретает большую актуальность. .
Шина CAN представляет собой два провода, двухпроводную линию в форме витой пары, которая замкнута терминаторами по 120 Ом, равными волновому сопротивлению этой линии. Таким образом на ней отсутствуют какие-либо отражающие сигналы. К ней на равноправной основе подключено любое количество приёмопередатчиков, формирующий сигналы. CAN - это последовательная коммуникационная шина, определенная Международной организацией по стандартизации (ISO). разработана для автомобильной промышленности для замены сложного жгута проводов на двухпроводную шину. Спецификация требует высокой устойчивости к электрическим помехам и возможности самодиагностики и ремонта. ошибки данных. Эти функции привели к популярности CAN в различных отраслях, включая строительство. автоматизация, медицина и производство [2].
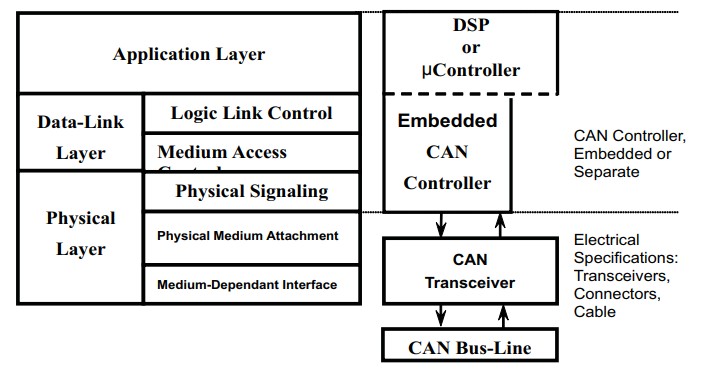
На рисунке 1 показан прикладной уровень устанавливает канал связи с приложением верхнего уровня. Протокол, такой как независимый от поставщика протокол CANopen. Этот протокол поддерживается международной группой пользователей и производителей, CAN in Automation (CiA). Многие протоколы предназначены для конкретных приложений, таких как промышленная автоматизация, дизельные двигатели или авиация. Другие примеры отраслевых стандартов на базе CAN протоколы: CAN Kingdom от KVASER и DeviceNet от Rockwell Automation.
2. Описание стандарта CAN
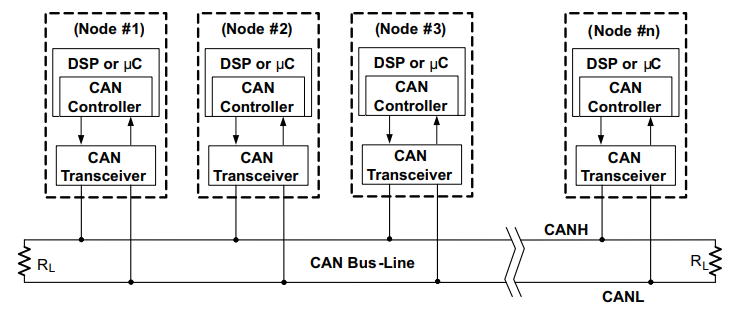
Уровни канала передачи данных и физической сигнализации на рисунке 1, которые обычно прозрачны для системы оператора, включены в любой контроллер, который реализует протокол CAN, например TMS320LF2812 от TI 3,3-V DSP со встроенным контроллером CAN. Затем осуществляется подключение к физическому носителю через линейный приемопередатчик, такой как приемопередатчик TI SN65HVD230 3.3-В CAN, чтобы сформировать системный узел, как показано на рисунке 2.
Сигнализация носит дифференциальный характер, благодаря чему CAN обладает надежной помехозащищенностью и отказоустойчивостью. Сбалансированная дифференциальная передача сигналов уменьшает помехи и обеспечивает высокую скорость передачи сигналов по витой паре кабеля. Сбалансированный означает, что ток, протекающий по каждой сигнальной линии, одинаков, но противоположен по направлению, что приводит к эффекту подавления поля, который является ключом к низкому уровню шума. Использование сбалансированного дифференциала, приемники и витая пара улучшают подавление синфазных помех и высокую помехоустойчивость CAN-шины [5].
Спецификации высокоскоростного стандарта ISO 11898 даны для максимальной скорости передачи данных 1 Мбит/с при длине шины 40 м максимум 30 узлов. Он также рекомендует максимальную непрерывную длину 0,3 м. Кабель должен представлять собой экранированную или неэкранированную витую пару с сопротивлением 120 Ом волнового сопротивление (Zo). Стандарт ISO 11898 определяет одну линию кабеля с витой парой как, топология сети, показанная на рис. 2, с обоими концами с резисторами 120 Ом, которые соответствуют волновому сопротивлению линии для предотвращения отражения сигнала. Согласно ISO 11898, размещение RL на узле следует избегать, потому что линии шины теряют завершение, если узел отключен от шины.
Две сигнальные линии шины, CANH и CANL, в неактивном рецессивном состоянии пассивно смещены к = 2,5 В. Доминирующее состояние на шине принимает CANH = 1 В выше до = 3,5 В, а CANL = 1 В ниже до = 1,5 В, создавая типичный дифференциальный сигнал 2 В, как показано на рисунке 2.
3.Формирование сообщений CAN
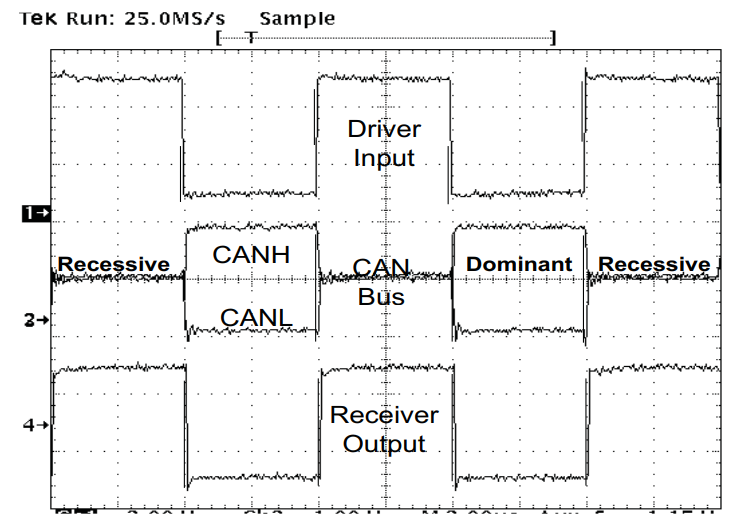
Фундаментальная характеристика CAN — это противоположное логическое состояние между шиной и входом драйвера и выходом приемника. Обычно высокий логический уровень связан с единицей, а низкий логический уровень — связан с нулем, но не так на шине CAN. Вот почему трансиверы TI CAN имеют вход драйвер, а выходные контакты приемника пассивно подняты внутрь, так что при отсутствии какого-либо входа устройство автоматически по умолчанию переходит в состояние рецессивной шины на всех входных и выходных контактах.
Доступ к шине управляется событиями и происходит случайным образом. Если два узла пытаются занять шину одновременно, доступ реализован с неразрушающим побитовым арбитражем. Неразрушающий означает, что узел, выигравший арбитраж просто продолжается с сообщением, без уничтожения или повреждения сообщения другим узлом.
Назначение приоритета сообщениям в идентификаторе — это особенность CAN, которая делает его особенно привлекательным для использования в среде управления в реальном времени. Чем ниже номер идентификатора двоичного сообщения, тем выше его приоритет. Идентификатор, полностью состоящий из нулей, является сообщением с наивысшим приоритетом в сети. Потому что он удерживает шину доминирующим дольше всего. Следовательно, если два узла начинают передачу одновременно, узел, который отправляет последний бит идентификатора как ноль (доминантный), в то время как другие узлы отправляют единицу (рецессивный) сохраняют контроль над шиной CAN и продолжают завершать свое сообщение. Доминантный бит всегда перезаписывает рецессивный бит на шине CAN [3].
Обратим внимание, что передающий узел постоянно отслеживает каждый бит своей передачи. Это причина конфигурация приемопередатчика на рисунке 4, в которой выходные контакты CANH и CANL драйвера внутренне привязаны к входу приемника. Задержка распространения сигнала во внутреннем контуре от входа драйвера на выход приемника обычно используется как качественная мера приемопередатчика CAN. Эта задержка распространения называется временем цикла (tLOOP в таблице данных TI), но принимает различные значения номенклатуры от поставщика к поставщику.
4. Использование шины CAN для микроконтроллера STM32F4
Периферийное устройство Basic Extended CAN, названное bxCAN, взаимодействует с сетью CAN. Это поддерживает протоколы CAN версии 2.0A и B. Он был разработан для управления количеством входящих сообщений эффективно с минимальной загрузкой процессора. Он также отвечает требованиям приоритета для передаваемых сообщений [9].
Для приложений, критически важных с точки зрения безопасности, контроллер CAN обеспечивает все аппаратные функции для поддержка опции CAN Time Triggered Communication.
Блок реализует шину CAN для приложения сетевой связи. Стоит поместить этот блок в модель, чтобы включить функцию модуля CAN. Блок установит скорость связи, назначение контактов (в соответствии с пользовательской конфигурацией) и базовую конфигурацию.
Используется этот блок, чтобы отправить пакет данных на шину и принять его другим устройством. Полезно для приложения связи по сети передачи данных. Этот блок передает пакет данных в исходящий буфер (3 исходящий почтовый ящик). Если режим передачи Блокирующий, процесс будет ждать, пока сообщение не будет отправлено на шину.
Используем этот блок для создания прерывания при совпадении идентификатора фильтра. Два варианта этого блока:
1. Асинхронный блок (прерывание), выход должен быть подключен к подсистеме вызова функций. Вызов функции будет активен, если полученные данные соответствуют конфигурации фильтра.
2. Буфер сообщений, пользователь может проверить количество сообщений, полученных портом «Сообщение в ожидании». Рекомендуется использовать подсистему Do-While для обработки всех ожидающих сообщений в буфере.
5.Разработка приёмопередатчика для платформы на базе Arduino
Для этого эксперимента мы будем использовать такие компоненты, как:
- CAN контроллер MCP2515 – 2 шт;
- плата Arduino (Uno, Nano, Mega) – 2 шт;
- макетная плата ;
- соединительные провода .
Модуль MCP2515 - это контроллер шины CAN, который позволяет обмениваться данными между периферийными устройствами и микроконтроллером без подключений к компьютеру. Прежде чем обратиться к сборке аппаратных компонентов, мы рассмотрим основные моменты, связанные с этой технологией [10].
Controlled Area Network - стандарт интерфейса. Он часто используется в электронных системах диагностики современных автомобилей для передачи информации от блока управления к другим цифровым датчикам и механизмам (контроля температуры, давления и т.п.). Такая его особенность позволяет активно применять устройство во многих как простых, так и более сложных проектах (например, моделирование системы «умный дом») – все это без задействования ПК [6].
Модуль MCP2515 включает в себя CAN контроллер MCP2515, который представляет собой высокоскоростной CAN приемопередатчик. Соединение модуля MCP2515 с микроконтроллером осуществляется с помощью интерфейса SPI, поэтому его легко подключить ко всем микроконтроллерам с данным интерфейсом.
На плате установлен кварцевый генератор с частотой 8 МГц. Доступна даже версия с частотой 16 МГц. Перемычка может быть присоединена, что даст окончание 120 Ом. CAN_H и CAN_L — это два винта, к которым можно прикрепить провода на расстоянии для связи с другим модулем CAN
6.Применение шины CAN для управления портальным краном
Портальный кран - это мощное промышленное оборудование, который широко применяется в грузоперевозках, строительстве, а также других отраслях. Управление портальным краном - это сложный и ответственный процесс, который требует высокой точности и надежности.
Шина CAN (Controller Area Network) могла бы быть использована для управления портальным краном. Шина CAN позволяет передавать данные между различными устройствами, подключенными к системе управления.
Один из способов управления портальным краном - это использование CAN-шин. CAN (Controller Area Network) - это коммуникационный протокол, который используется для передачи данных в автомобильной и промышленной сферах. CAN-шин обеспечивает быструю и надежную связь между управляющими устройствами и управляемыми системами.
В случае портального крана, шина CAN может использоваться для передачи информации между различными компонентами системы управления, такими как датчики положения и нагрузки, приводы двигателя, контроллеры двигателей и т.д.
Управление портальным краном по CAN-шине осуществляется с помощью специального контроллера, который подключается к CAN-шине и управляет работой крана. Контроллер считывает данные с датчиков, которые установлены на кране (например, датчики положения, нагрузки, температуры), и на основе этих данных принимает решения о дальнейших действиях.
Для управления портальным краном по CAN-шине необходимо иметь специальную программу, которая позволяет конфигурировать контроллер, настраивать параметры работы крана, а также отслеживать работу всех систем и устройств.
Шина CAN может использоваться для управления портальным краном. При этом различные устройства портального крана, такие как двигатели, сенсоры, контроллеры, могут быть подключены к шине CAN и обмениваться между собой информацией. Это позволяет обеспечить более эффективное и точное управление портальным краном. Например, шина CAN может использоваться для управления скоростью движения тали или для контроля нагрузки на крюке, что позволяет более точно выполнять грузоперевозки и обеспечивать безопасность работы портального крана.
Кроме того, шина CAN может использоваться для передачи команд управления краном, таких как команды перемещения крана, команды остановки и т.д.
Преимущества управления портальным краном по CAN-шине:
- Быстрая и надежная связь между управляющими устройствами и управляемыми системами
- Высокая точность и надежность управления краном
- Возможность настройки параметров работы крана в реальном времени
- Легкость в управлении и настройке системы
Однако следует отметить, что управление портальным краном по CAN-шине требует высокой квалификации и опыта в области автоматизации и промышленной электроники. Неправильная настройка системы или ошибки в работе контроллера могут привести к серьезным последствиям, вплоть до аварии. Поэтому, перед использованием системы управления портальным краном по CAN-шине, необходимо профессионально ее настроить и протестировать.
7.Выводы
CAN идеально подходит для приложений, требующих большого количества коротких сообщений с высокой надежностью в суровых условиях эксплуатации. Поскольку CAN основан на сообщениях, а не на адресах, он особенно хорошо подходит, когда данные требуются более чем в одном местоположении и согласованность данных в масштабе всей системы обязательна.
Ограничение сбоев также является важным преимуществом CAN. Неисправные узлы автоматически сбрасываются с шины, что предотвращает выход сети из строя любого отдельного узла и гарантирует, что пропускная способность всегда доступна для передачи важных сообщений. Это сдерживание ошибок также позволяет добавлять узлы к шине во время работы системы, также известное как горячее подключение.
Многочисленные функции приемопередатчиков TI CAN делают их идеально подходящими для многих тяжелых условий эксплуатации, к которым адаптируется протокол CAN. Среди приложений, находящих решения с CAN: автомобили, грузовики, мотоциклы, снегоходы, поезда, автобусы, самолеты, сельское хозяйство, строительство, добыча полезных ископаемых, и морских транспортных средств.
Для выполнения поставленной задачи разработана и реализована система управления для платформы Arduino, но также и на базе микроконтроллера STM32F4. Для обеспечения передачи информации применяются модуль Arduino, CAN-контроллер MCP2515.
Управление данным устройством осуществляется с компьютера или дистанционно с помощью Bluetooth, выбрано оборудование и произведён монтаж его на платформу.
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: июнь 2025 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
- Третьяков С.А. НПКФ "Дэйтамикро" Controller Area Network (CAN) - локальная сеть контроллеров - Электроника №9 и №10 /98 г. Минск - 25 с.
- Volkswagen AG , Вольфсбург . Программа самообучения 238. Обмен Данными посредством шины CAN - Перевод и верстка ООО “ФОЛЬКСВАГЕН Груп Ру 2010
- Can- интерфейс М.: Юрайт, 2018. – 360 с.
- Юнусова Л.Р. Магсумова А.Р. - Автомобильная шина CAN , подходы и реализация . Технические Науки. осква: Издательство Омега-Л. - 2013. – 384 с.
- Controller Area Network : Учебное пособие для вузов. / Кулик Ю.А. — М. Высшая школа 1971г. — 456 с.
- Arduino — постигаем CAN BUS : учебное пособие / А. В. Дробов, В. Н. Галушко. — Минск : Республиканский институт профессионального образования (РИПО), 2015. — 292 c. — ISBN 978-985-503-540-5.
- Что такое Arduino ? - MICPIC : учебник / Лыкин А.В.. — Новосибирск : Новосибирский государственный технический университет, 2017. — 363 c. — ISBN 978-5-7782-3037-8.
- Библиотека интерфейса CAN Arduino MCP2515 / Веников В.А. — М.: Высш. шк., 1985. — 536с.
- STM32: контроллер bxCAN - MICPIC отв. ред. Н. И. Воропай. – Новосибирск: Наука, 2008. – 228 с.
- MCP2515: контроллер шины CAN с интерфейсом SPI - MICPIC учеб. пособие / А. В. Лыкин. – Новосибирск: Изд-во НПУ, 2013. – 115 с.
- Седяко П.В. - Средства изучения CAN шины автомобиля - Электронные данные - / И. И. Карташев, В. Н. Тульский, Р.Г. Шамонов и др.; под ред. Ю. В. Шарова. – М.: Издательский дом МЭИ, 2006. – 320 с.