Аннотация
Жуков А.С., Мирошник Д.Н. Разработка прототипа механизма передвижения портального крана всенаправленного движения.В данной работе в программе Solidworks была создана 3Д-модель портального крана. Выполнено моделирование движущихся узлов в системе моделирования Simulink.
Тезисы статьи
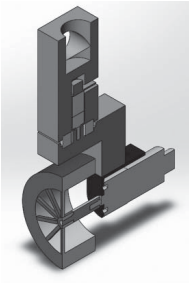
Рисунок 1 – 3Д модель опоры колёсного механизма
Разработка прототипов современного мехатронного оборудования является актуальной задачей [1], особенно это применимо к портальным кранам. В них применяется огромное число приводов и решаются задачи движения крана, моста и подъёма груза с учетом оптимизации по быстродействию и гашения колебаний. Отдельное место в данном кране занимает механизм передвижения, позволяющий крану быстро осуществлять маневровые операции. Он содержит 4 электропривода передвижения крана, и 4 электропривода поворота его опор.
Целью данной работы было создание модели механизма передвижения портального крана для дальнейшего исследования процессов в нем.
На первом этапе по рассчитанной мощности были подобраны двигатели с редукторами для поворота и передвижения опор. Так для поворота был выбран микродвигатель постоянного тока Bringsmart GB12-N20B мощностью 0.3 Вт и выходной частотой 150 об/мин, а для движения Bringsmart JGA25-371 мощностью 1.5 Вт и частотой 400 об/мин.
С учетом посадочных размеров подобранных двигателей были разработаны 3Д модели в программной среде Solidworks (рис.1), которые позволили с применением 3Д принтеров и прочих подручных средств собрать механизм передвижения портального крана.
В результате получена модель механизма передвижения портального крана с восемью приводами, которую можно использовать для управления его движением. Полученный прототип возможно усовершенствовать за счет установки механизмов движения моста и подъемов.