Аннотация
Корягин Е.В. - Разработка системы управления мобильным роботом.
Описана модель высокоуровневой системы управления мобильного робота, структура которой представляет собой
нейроподобную растущую сеть. Изложены основные понятия теории нейроподобных растущих сетей, а также рассмотрены
основные компоненты системы управления мобильным роботом.
A model of a high-level control system of mobile robot is described. The structure of the system is a neuron
growing net. Basic concepts of neuron growing nets theory are given. Main components of the system are described.
Ключевые слова: робот, система управления, нейроподобная растущая сеть.
Key words: robot, control system, neuron growing nets.
Введение
На базе РГУ им Канта разрабатывается робот для домашнего применения [1—3]. На сегодняшний день достигнуты следующие успехи:
- На базе комплекса ПО «Microsoft Robotics Studio» создана модель робота, состоящая из собственно физической модели робота (рис. 1) и моделируемого оборудования.
- Протестирована низкоуровневая система управления (СУ), которая позволяет непосредственно управлять узлами робота.
- Имеются наработки по системам технического зрения, распознавания голоса, навигации (рис. 2).
Дальнейшее развитие рассматриваемой модели состоит прежде всего в совершенствовании высокоуровневых алгоритмов управления роботом, а именно в создании высокоуровневой системы управления, которая должна обеспечивать согласование работы уже отлаженных алгоритмов, программирование более сложных поведенческих актов, а также накопление и обработку приобретенных знаний об окружающем предметном мире.

Рисунок 1 – Модель разрабатываемого робота
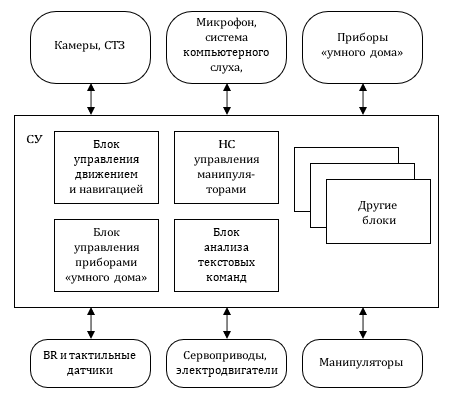
Рисунок 1 – Общая схема СУ разрабатываемого робота
1. Понятие нейроподобной растущей сети
Основные функции, которые должна выполнять разрабатываемая СУ, — это обучение, извлечение знаний, приобретение навыков и выработка стратегии поведения в каждой конкретной ситуации исходя из накопленного опыта. С точки зрения физиологии высшей нервной деятельности «мозг» робота должен уметь вырабатывать условные рефлексы и пользоваться ими [4].
Наиболее удобным и мощным, по мнению автора, инструментом по выработке и накоплению условных рефлексов является структура, разработанная В. А. Ященко: нейроподобные растущие сети (н-РС) [5—7]. Н-РС представляет собой связный ориентированный граф нейроподобных элементов. Принципы и правила установления связей, а также логика функционирования сети определяются ее логической структурой. Н-РС являются динамической структурой, которая изменяется в зависимости от значения и времени поступления информации на рецепторы, а также предыдущего состояния сети. В ней информация об объектах представляется ансамблями возбужденных вершин и связями между ними.
Запоминание описаний объектов и ситуаций сопровождается вводом в сеть новых вершин и дуг при переходе какой-либо группы рецепторов и нейроподобных элементов в состояние возбуждения. Переменный коэффициент связности позволяет управлять числом дуг, приходящих на вновь образуемые нейроподобные элементы, и числом нейроподобных элементов в сети.
2. Модель системы управления
Система управления разрабатываемой виртуальной модели домашнего робота основана на многомерной рецепторно- эффекторной нейроподобной растущей сети [7] (рис. 3). Рецепторные данные предоставляют следующие информационные пространства:
- тактильные датчики на корпусе робота;
- инфракрасные датчики;
- тактильные датчики рук-манипуляторов;
- система компьютерного слуха;
- система технического зрения;
- внутреннее состояние системы (скорости вращения двигателей, углы поворота колес и наклона корпуса, уровень заряда батареи, данные о неисправности того или иного оборудования и т. д.).
- Корягин Е.В., Ложкин П.В., Прокопович П.А. Основные системы интеллектуальных
мобильных устройств//Вестник Российского государственного университета им. И. Канта. 2008. № 10.
- Корягин Е.В., Ложкин П.В., Кащенко Н.М., Толстель О.В. Интеллектуальная
система — домашний робот // Междунар. науч.-техн. конф. «Интеллектуальные системы AIS'07». Дивноморское,
2007.
- Куницын С.М., Толстель О.В., Шарапаев Л.А. Разработка прототипа домашнего робота
// X национальная конф. по искусственному интеллекту с международным участием КИИ-2006: Тр. конф.: В 3 т. М.,
2006.
- Данилова H.H. Физиология высшей нервной деятельности. Ростов н/Д., 2005.
- Шевченко А.И., Ященко В.А. От искусственного интеллекта к искусственной личности
// Искусственный интеллект. 2009. № 3.
- Ященко В.А. Некоторые аспекты «нервной деятельности» интеллектуальных систем и
роботов // Там же. № 4.
- Jaschenko V. Neuron growing nets — new technology for information processing //
International symposium “Computers in Europe. Past, present and future”. 1998. P. 102—109.
- Прукс В.Э., Толстель О.В. Модель гибридной нейронной сети для распознавания
графических образов // Международная научно-техническая конференция «Интеллектуальные системы AIS’07».
Дивноморское, 2007.
В качестве безусловных рефлексов (врожденные знания и умения, автоматические реакции) использованы отлаженные механизмы блока движения и навигации (остановка перед препятствием, объезд препятствий [1]) и способности системы технического зрения выделять элементарные геометрические фигуры [8].
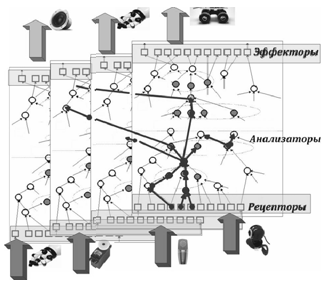
Рисунок 1 – Схема многомерной рецепторно-эффекторной н-РС
Заключение
В настоящий момент в программной среде Microsoft Robotics Studio создана виртуальная модель робота. Налажена работа некоторых низкоуровневых блоков управления. Автором и группой разработчиков ведется работа по созданию высокоуровневой системы управления на основе многомерной рецепторно-эффекторной нейроподобной растущей сети. Первоочередным результатом работы данной системы должен стать механизм установления ассоциативных связей между потоками информации из разных рецепторных зон, например связь зрительного изображения шара с его звуковым обозначением.
Список использованной литературы