Выбор типа сенсорного устройства и места его расположения в технологическом оборудовании с ЧПУ
Автор:Горобец И. А., Мелешко Э. Г., Колесников В. М.
Источник:ИНЖЕНЕР: студенческий научно-технический журнал. – Донецк, ДонНТУ, 2024. - № 2(38). с. 9-11.
Аннотация
Горобец И. А., Мелешко Э. Г., Колесников В. М. Выбор типа сенсорного устройства и места его расположения в технологическом оборудовании с ЧПУ
Ключевые слова:оборудование, управление, сенсор, конструкция, параметры.
Приведены возможности использования известных физических явлений при проектировании сенсоров адаптивных устройств управления оборудованием с ЧПУ при изготовлении изделий машиностроения. Предложен вариант конструкции сенсора на основе тензометрии. Даны рекомендации по расположению сенсора в конструкции фрезерного станка с ЧПУ.Общая постановка проблемы
Одним из направлений дальнейшего совершенствования парка современного технологического оборудования с ЧПУ является оснащение его адаптивными системами управления, позволяющих учитывать текущие изменения параметров технологического процесса изготовления объектов машиностроительного производства [1]. Важным элементом такой системы являются сенсоры физических величин процесса изготовления [2, 3]. При механической обработке изделий машиностроения ключевым параметром, влияющим на затраты мощности резания, энергетических и стоимостных показателей обработки являются усилия резания [2]. Поэтому вопросы измерения мгновенных показателей усилий резания для использования в адаптивной системе управления станком с ЧПУ являются актуальными. Сенсоры для измерения усилий резания могут быть спроектированы на основе различных физических явлений [3]: тензорезистивный эффект; пьезоэлектрический эффект; эффект изменения электрической емкости; эффекты, которые основаны на электромагнитных явлениях; эффект изменения частоты; эффект наведения электрического заряда.
Рассматривая физические процессы во всех известных измерительных сенсоров, можно в каждом случае установить корреляционную связь между выходной Y и входной X величинами:

Отношение изменения выходной величины к изменению входной характеризует чувствительность S преобразовательного устройства.

Чувствительность сенсора S? в этом случае является произведением элементарных величин чувствительностей преобразовательных устройств, входящих в состав датчика.

При проектировании сенсоров усилий резания для металлорежущего оборудования с ЧПУ воспользуемся хорошо зарекомендовавшими себя тензорезисторными преобразователями. Основой тензорезисторных сенсоров является тензоэфект: при изменении длины проволоки (для проволочного тензорезистора) или фольги (для фольгового тензорезистора) изменяется ее сопротивление.
Особенностью сенсоров силы является малые величины деформации порядка 0,1 – 0,2% и для этих пределов основные параметры измерительных устройств: погрешность тензорезисторов, гистерезис, нелинейность будут минимальными.
Структурную схему тензорезисторного датчика силы можно представить в виде последовательного соединения трех измерительных преобразователей, рис. 1.

Рисунок 1 - Структурная схема тензорезисторного датчика силы
Структурная схема сенсора давно не является предметом новизны, однако реализация конструкции механической части сенсора является предметом креативности и новизны. Интерес представляет также место расположения сенсорного устройства в объекте управления. Особенно актуальным этот вопрос проявляется в реализации адаптивной системы управления металлорежущим станком с ЧПУ, например, фрезерным, поскольку расположить датчик непосредственно в зоне резания не представляется возможным. Более того, конструктивное расположение сенсора во вращающейся части шпинделя фрезерного станка потребует наличие токосъемного устройства, преобразующего передачу электрического сигнала с движущегося сенсора в стационарное неподвижное устройство. Это внесет дополнительную погрешность устройства из-за нестабильности сопротивления подвижных и неподвижных частей токосъемного устройства [3].
Поэтому, одним из путей решения вопроса эффективного использования сенсора является его рациональное размещение в корпусе шпинделя станка. В качестве измерительной схемы можно использовать стандартную мостовую схему измерения [3, 4], рис. 2.
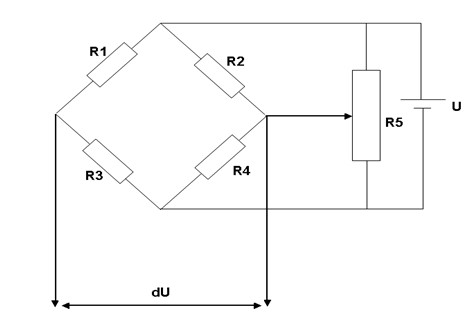
Рисунок 2 - Мостовая схема соединения тензорезисторов датчика
Выводы
Актуальным вопросом использования адаптивных систем управления современных металлообрабатывающих станков с ЧПУ является проектирование конструкции сенсора усилий резания и выбор рационального его места расположения в конструкции технологического оборудования.
Список использованной литературы
1. Елагин, В.В. Технологические основы обработки деталей в гибких автоматизированных производствах: учебное пособие / В.В. Елагин, А.А. Терентьев - Оренбург: ОГУ, 2019. – 136 с.
2. Петраков, Ю.В. Автоматическое управление процессами резания: учебное пособие / Ю.В. Петраков, О.И. Драч?в. – Старый Оскол: ТНТ, 2012. – 408 с.
3. Болтян А. В., Горобец И. А. Теория инженерных исследований: Учебное пособие. – Севастополь: «Вебер», 2001. – 139 с., ил.
4. Проектирование датчиков для измерения механических величин / Под ред. А. П. Осадчего. –М.: Машиностроение, 1979. - 480 с.