
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования, планируемые результаты
- 3. Обзор исследований и разработок
- 3.1 Анализ шахтного аккумуляторного электровоза как объекта автоматизации
- 3.2 Анализ схемы DC-DC преобразователя
- 3.3 Моделирование системы рекуперативного торможения
- Выводы
- Список источников
Введение
Горнодобывающая промышленность играет ключевую роль в экономике нашей страны, обеспечивая добычу ценных металлических руд и горно-химического сырья. Несмотря на то, что подземным способом добывается лишь около 30% этих ресурсов, именно на подземных работах сосредоточено большее количество трудовых ресурсов. Это связано с особенностями разработки месторождений, которые часто залегают на значительных глубинах или имеют меньшую мощность, чем те, которые разрабатываются открытым способом. Подземная добыча имеет свои преимущества, особенно в контексте минимизации воздействия на окружающую среду. В отличие от открытых разработок, которые сопровождаются значительными нарушениями земной поверхности и требуют больших затрат на рекультивацию, подземные работы позволяют сохранить природный ландшафт. Однако они предъявляют высокие требования к организации производственных процессов и использованию передовых технологий[1].
Современные тенденции в развитии горнодобывающей отрасли направлены на повышение производительности труда через техническое перевооружение и внедрение инновационных технологий. Одним из ключевых аспектов является совершенствование рудничного транспорта, который играет важную роль в общей эффективности подземных работ. Разработка и внедрение систем управления шахтными электровозами, а также использование высокопроизводительных машин с электрическим приводом, становятся основными направлениями для достижения этих целей[2].
Введение новых технологий и оборудования не только способствует увеличению производительности, но и позволяет улучшить условия труда, повысить безопасность и снизить затраты на добычу. Таким образом, развитие горнодобывающей промышленности требует комплексного подхода, включающего технические инновации, стандартизацию и унификацию оборудования, а также соблюдение экологических и санитарных норм.
1. Актуальность темы
Современное развитие подземного транспорта в горнодобывающей промышленности требует внедрения инновационных технологий, направленных на повышение эффективности и надежности перевозки руды. Одной из ключевых проблем, сдерживающих прогресс в этой области, является отсутствие рекуперативного торможения в большинстве рудничных электровозов. Это приводит к значительным потерям энергии, так как энергия, выделяемая при торможении, не возвращается в систему, а рассеивается в виде тепла.
Кроме того, существующие системы управления тяговым электроприводом, основанные на контактной системе с реостатным регулированием, не обеспечивают стабильную скорость движения. Это связано с тем, что такие системы вызывают значительные броски пускового и тормозного тока, что приводит к проскальзыванию колес и нестабильности движения электровоза. В результате снижается общая производительность транспортного процесса и увеличиваются эксплуатационные затраты[3].
В условиях растущих требований к энергоэффективности и устойчивости производственных процессов, актуальность разработки и внедрения систем управления с рекуперативным торможением становится особенно высокой. Такие системы не только позволяют существенно снизить потери энергии, но и обеспечивают более плавное и стабильное управление скоростью, что способствует увеличению производительности и надежности рудничного транспорта[4]. Решение этих задач является важным шагом на пути к модернизации горнодобывающей отрасли и достижению устойчивого развития.
2. Цель и задачи исследования, планируемые результаты
Основные цели дисетрции:
• эффективное управление электродвигателем постоянного тока шахтного аккумуляторного электровоза;
• возможность рекуперативного торможения;
• поддержание заданной скорости на всем участке движения;
• контроль и мониторниг состояни систем электровоза, а также оповещения об аварийных ситуцациях.
3. Обзор исследований и разработок
3.1 Анализ шахтного аккумуляторного электровоза как объекта автоматизации
Существующий распространенный способ управления приводом электровоза является способ комбинированного включение аккумуляторов и электродвигателей. — этот способ управления скоростью электровоза, который заключается в сочетании работы электрических двигателей и аккумуляторной батареи. При комбинированном включении аккумуляторов и электродвигателей скорость электровоза изменяется путем изменения напряжения на тяговых двигателях путем комбинирования параллельного и последовательного подключения как обмоток электродвигателя, так и ячеек аккумуляторной батареи. Недостатком данного способа управления является то, это приводит к неправильному распределению энергии между элементами системы, что может привести к неэффективному использованию энергии и ухудшению производительности. А также, что эта технология не обеспечивает точной и эффективной регулировки скорости[5].
Такие системы управления тяговым электроприводом недостаточно надежны, их работа сопровождается значительными бросками пускового и тормозного тока и усилий. При этом часто возникает проскальзывание колес (буксование и юз) электровоза относительно рельсов. Использование электродинамического торможения электроприводом вызывает выделение значительного количества тепла, которое можно вернуть в аккумуляторную батарею, что увеличит время автономной работы.
Решением проблемы может стать замена электрической схемы на более современную. Это может привести к ряду
преимуществ:
• эффективно управлять скоростью движения электровоза, что позволяет уменьшить износ тормозных систем и
улучшить безопасность движения на железнодорожных путях;
• более точно регулировать расход заряда батареи, что позволяет значительно снизить затраты на
эксплуатацию и увеличить время автономной работы;
• более грамотно распределять нагрузку между моторами электровоза, что повышает их эффективность и
уменьшает вероятность возникновения аварийных ситуаций;
• возможность предотвратить буксование и юз;
• эффективнее использовать энергию, выделяющуюся при торможении. Вместо того, чтобы просто терять эту
энергию в виде тепла, она будет сохраняться и перенаправляться обратно в аккумуляторную батарею;
• более точно рассчитывать необходимые тормозные силы. Это позволит избежать излишнего износа тормозных
систем и снизить вероятность возникновения аварийных ситуаций.
Существует два подхода к замене существующего метода управления: замена системы управления с сохранением постоянных токовых двигателей (ДПТ) или замена двигателей на бесколлекторные двигатели постоянного тока (Вентильные двигатели)[6].
Вентильные двигатели (ВД) имеют ряд преимуществ перед двигателями постоянного тока:
• бесконтактность и отсутствие узлов, требующих частого обслуживания (коллектора);
• возможность использования во взрывоопасной и агрессивной среде;
• большой срок службы и высокая надёжность за счёт отсутствия скользящих электрических контактов.
Однако не смотря на все преимущества есть недостатки.
• высокая стоимость двигателя, обусловленная частым использованием дорогостоящих постоянных магнитов в
конструкции ротора. Стоимость электропривода с ВД, сопоставима со стоимостью аналогичного электропривода
на основе ДПТ;
• отсутствие решений на основе ВД, соответствующие конструктивным особенностям и массогабаритным
показателям для использования с электровозом АМ8Д.
Приняв во внимания преимущества и недостатки ВД перед ДПТ сделан вывод: экономически целесообразно использовать двигатель постоянного тока.
Способ регулирования скорости двигателя постоянного тока заключаться в изменении напряжения на обмотках двигателя. Путем внедрения в схему управляемого импульсного стабилизатора напряжения (DC-DC преобразователь). Он имеет высокий коэффициент полезного действия, а также малые габариты и массу на удельную мощность по сравнению с резистивными методами управления.
3.2 Анализ схемы DC-DC преобразователя
По сравнению с резистивным методом управления, DC-DC преобразователи обладают рядом преимуществ: энергоэффективность, большая гибкость управления, рекуперация, увеличение срока службы оборудования, габариты и вес. С учетом быстрого развития микропроцессорной электроники, построение таких преобразователей, позволяет в значительной мере сократить расходы на эксплуатацию.
Для управления моментом и скоростью двигателя постоянного тока следует изменять его напряжение питания. Для таких целей целесообразно использовать понижающий DC-DC преобразователь (Рисунок 1). Рассмотрим его работу более детально. Схема управления генерирует ШИМ сигнал определённой частоты с определённой степенью заполнения. Этот сигнал поступает на силовой транзистор, который генерирует импульсы с той же частой и скважностью что и сигнал управления. Получение импульсное напряжения поедается на фильтр второго порядка, который представляет с собой LC фильтр. Энергия, накопленная в катушке индуктивности во время замкнутого состояния ключа, запасается в виде магнитного поля. Как только ключ переходит в разомкнутое состояние, индуктивность стремится поддержать ток в первоначальном направлении, и эта энергия начинает перетекать через диод на выходной конденсатор и нагрузку[7].
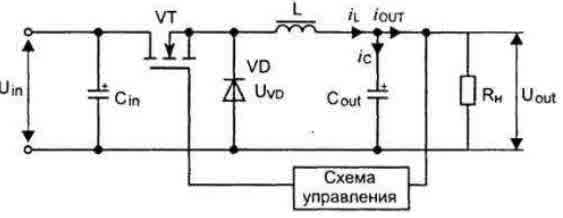
Рисунок 1 - Типовая схема понижающего DC-DC преобразователя.
При использовании мощных ДПТ и развитии больших силовых токов, ключевым моментом становится обратный диод, что в системах с питанием от аккумуляторной батареи, ухудшат время работы. Оптимальным вариантом является замена этого диода на силовой транзистор, что позволяет создать синхронный понижающий DC-DC преобразователь (Рисунок 2)[8].
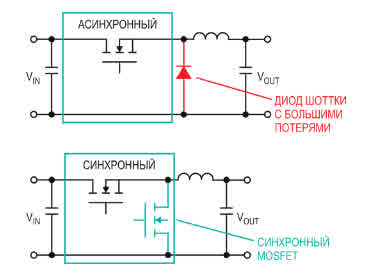
Рисунок 2 - Сравнение синхронного и асинхронного DC-DC преобразователей.
Двигатели постоянного тока, благодаря своей обратимости, могут функционировать не только в режиме потребления электроэнергии от аккумуляторной батареи для обеспечения движения, но и в режиме генерации электроэнергии при рекуперативном торможении. Этот процесс позволяет возвращать энергию, вырабатываемую во время замедления движения, обратно в аккумуляторную батарею, тем самым увеличивая общий пробег на одном заряде и снижая общую нагрузку на энергосистему. Однако, прямое подключение двигателя в режиме генератора к аккумуляторной батарее часто невозможно из-за разницы в уровнях напряжения: электродвижущая сила (ЭДС), генерируемая двигателем, может быть ниже напряжения батареи, что делает невозможной эффективную передачу энергии без дополнительного устройства. Именно здесь целесообразно использовать повышающий DC-DC (Рисунок 3), который позволит повысить напряжение от генерируемой ЭДС до уровня, необходимого для зарядки аккумуляторной батареи.
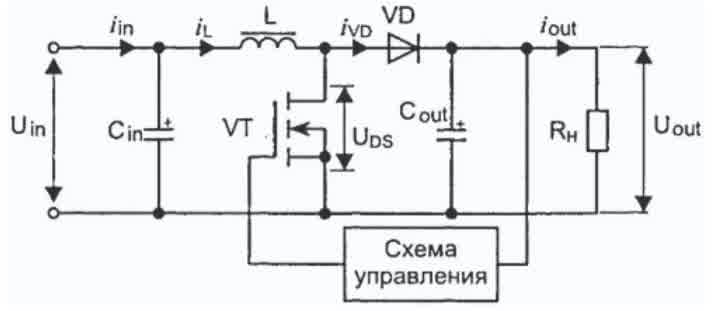
Рисунок 3 - Типовая схема повышающего DC-DC преобразователя.
Повышающий DC-DC преобразователь состоит из тех же электронных компонентов что и понижающий, силовой транзистор, индуктивность, диод. Учитывая, что источником электроэнергии будет служить электродвигатель, а потребителем аккумуляторная батарея, электрическая схема становиться идентичной электрической схеме понижающего преобразователя. Данное сходство позволяет нам использовать одну и ту же силовую схему для управления электрическим двигателем, как и в прямом режиме, так и в момент рекуперативного торможения.
3.3 Моделирование системы рекуперативного торможения
Для понимания работы и эффективности представленной схемы DC-DC преобразователя, особенно когда он используется для управления двигателем постоянного тока аккумуляторных шахтных электровозов, переход к этапу моделирования является критически важным. Моделирование позволяет всесторонне изучить поведение системы в различных условиях эксплуатации, оптимизировать параметры и устранить потенциальные недостатки до фактического производства и внедрения. В этом контексте, использование программного обеспечения для виртуального моделирования на основе Simulink от компании MathWorks становится предпочтительным способом[9].
На рисунке 4 представлена имитационная модель для анализа работы DC-DC в шахтном аккумуляторном электровозе[10]. Модель состоит из стандартных звеньев, предоставляемых пакетом Simulink, а именно: полумостовой двухсторонний DC-DC преобразователь, аккумуляторная батарея, двигатель постоянного тока с независимым возбуждением. Для удобства проектирования некоторое узлы были сгруппированные в блоки. Блок нагрузки двигателя (Рисунок 5) представляет с собой узел редуктора, колесо, блоки массы, и систему статической нагрузки (Рисунок 6), блок системы управления (Рисунок 7)[11].
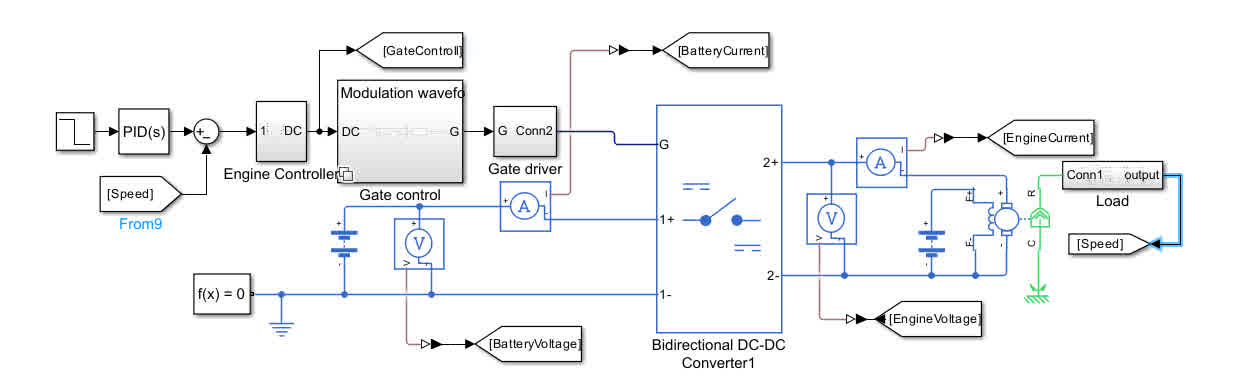
Рисунок 4 - Имитационная модель для анализа работы DC-DC в шахтном аккумуляторном электровозе.
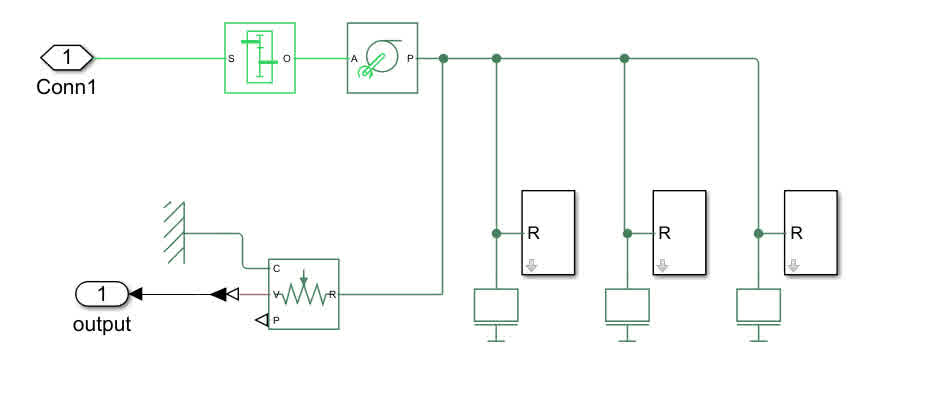
Рисунок 5 - Имитационная модель блока нагрузки двигателя.
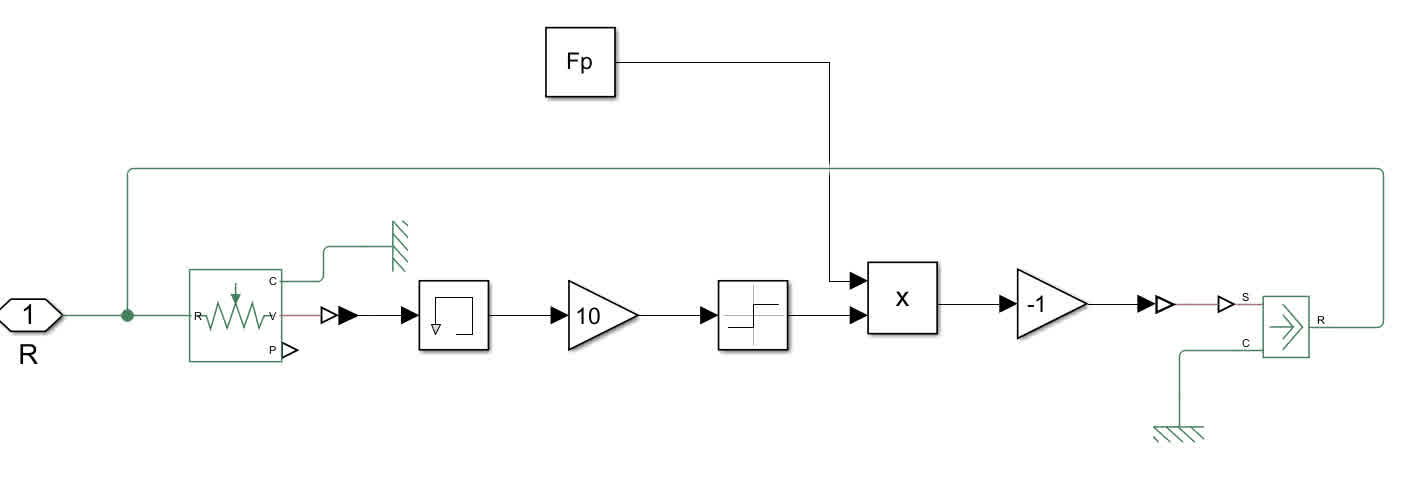
Рисунок 6 - Имитационная модель блока статической нагрузки.
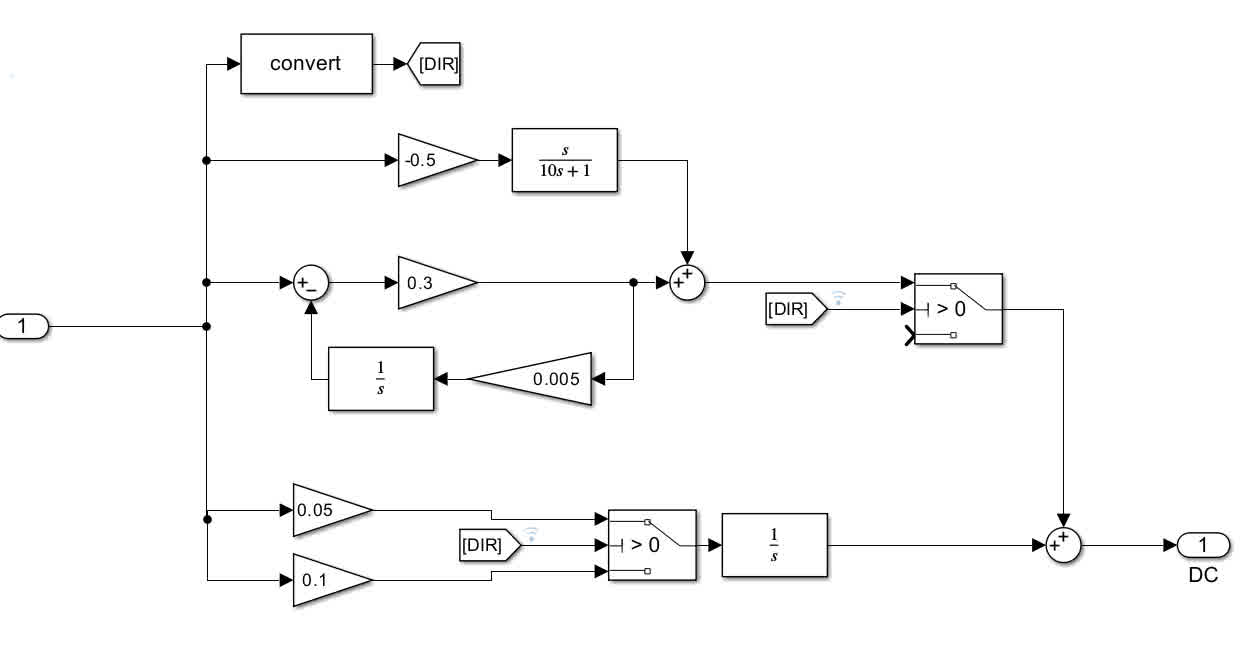
Рисунок 7 - Имитационная модель блока управления DC-DC преобразователя.
Среди полученных результатов (Рисунок 8) особенно значимыми являются графики набора скорости электровоза. Эти графики позволили нам оценить динамику разгона, плавность переходных процессов и общую эффективность системы управления в различных режимах работы. Было отмечено, что при применении повышающего DC-DC преобразователя скорость достигается более плавно и равномерно, что способствует уменьшению механического износа и увеличению срока службы оборудования.
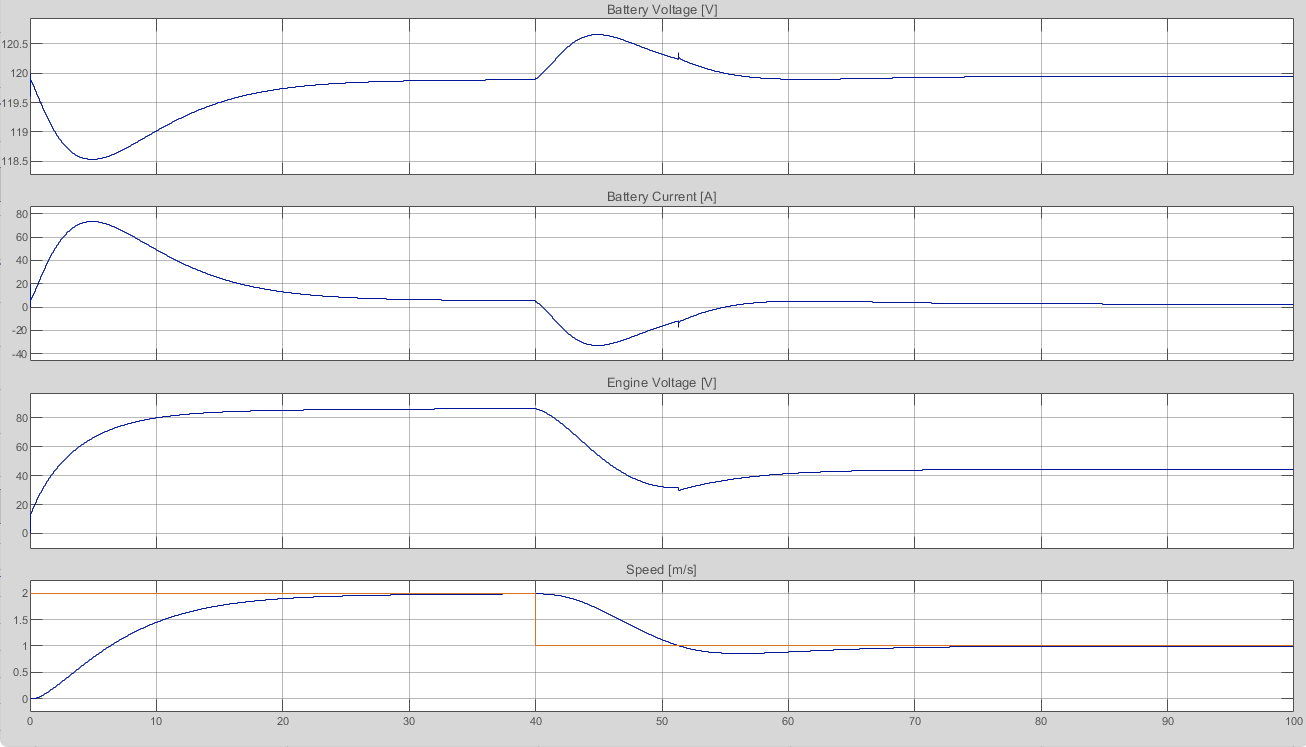
Рисунок 8 - Показатели системы в результате набора скорости и торможения .
Кроме того, благодаря моделированию, нам удалось продемонстрировать эффективность процесса рекуперативного торможения. Показания датчика тока на аккумуляторной батарее зафиксировали ключевые моменты, когда двигатель переходил из режима потребления в режим генерации электроэнергии. Графики ясно показали моменты, когда излишки кинетической энергии преобразовывались обратно в электрическую энергию, что способствовало их аккумулированию в батарее.
Выводы
В результате детального процесса моделирования в Simulink, мы успешно смогли визуализировать работу системы и получили важные данные, которые отражают эффективность реализованного DC-DC преобразователя в условиях управления двигателем постоянного тока аккумуляторных шахтных электровозов. Все эти результаты явно подтверждают, что внедрение DC-DC преобразователей является целесообразным и выгодным решением для систем управления шахтных аккумуляторных электровозов, позволяя не только максимизировать эффективность их работы, но и улучшать эксплуатационные характеристики и сокращать экологический след от их использования.
Список источников
- Автоматизированные системы управления электроподвижным составом [Электронный ресурс]: учебник: в 3 ч. / под ред. П.А. Баранова, А.Н. Савоськина. – М.: Маршрут, 2014. – 302 экз.
- Волотковский С.А. Рудничная электровозная тяга. – 4-е изд., перераб. и доп. – М.: Недра, 1981. – 389 с.
- Алексеев Н.И. Оптимизация систем электрической тяги в подземных выработках. – М.: Недра, 1979. – 252 с.
- Синчук О.Н., Беридзе Т.М., Гузов Э.С. и др. Системы управления рудничным электровозным транспортом. – М.: Недра, 1993. – 255 с.
- Грищенко А.В., Стрекопытов В.В. Электрические машины и преобразователи подвижного состава; Учебник для студентов учреждений сред. проф. образования. – М.: Издательский центр «Академия», 2005. – 320 с.
- Асинхронный тяговый привод локомотивов [Электронный ресурс]: учебное пособие / под ред. А.А. Зарифьяна. – М.: Маршрут, 2013. – 302 экз. Зарифьяна. – М.: Маршрут, 2013 г. – 302 экз.
- Петрович В.П., Глазачев А.В. Преобразователи постоянного тока / Силовая электроника. – ТПУ, 2014. – С. 143-167.
- Синчук О.Н., Удовенко О.А., Чумак В.В. Особенности переходных электромагнитных процессов в тяговом электроприводе с импульсным преобразователем напряжения рудничных аккумуляторных электровозов // Электротехника. – 2004. – № 6. – С. 58-60.
- Simulink Documentation [Электронный ресурс]. – Режим доступа: https://www.mathworks.com/help/.
- Кладиев С.Н., Вильнин А.Д., Пякилля Б.И. Модель электромеханической системы подвижного состава рудничного электровоза // Современные технологии. Системный анализ. Моделирование. – 2013. – № 1(37). – С. 65-68.
- Сидоров Н.И., Сидорова Н.Н. Как устроен и работает электровоз. – 5-е изд., перераб. и доп. – М.: Транспорт, 1988. – 223 с.