
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования
- 3. Анализ проблемы
- 4. Построение модели и результаты исследования
- Выводы
- Список источников
Введение
В современном мире электричество проникло во все наши сферы жизни: быт, сферы услуг, производство, транспорт, сырьевые и перерабатывающие отрасли и т. д. Энергосистемы для промышленных потребителей часто принадлежат самим потребителям. В этом случае можно сформировать понятие типичной структуры энергосистемы, которая наиболее распространена в жизни. Увеличение потребления электроэнергии и сложность энергосистем требуют постоянного совершенствования электростанций. Устаревшее оборудование следует заменить новым и экономичным в соответствии с международными стандартами. В связи с важностью правильной и быстрой работы релейной защиты, главное сделать правильный и оптимальный выбор параметров активации защиты и ее правильная конфигурация.
1. Актуальность темы
Работа посвящена актуальным вопросам совершенствования цифровой релейной защиты асинхронных двигателей системы собственных нужд электростанций путём модернизации защиты от перегрузки. Основная идея предложенного алгоритма защиты заключается в расчёте и контроле выделяемой суммарной энергии потерь в режимах перегрузки, обусловленной составляющими прямой и обратной последовательностей по данным измерения мгновенных значений фазных токов, фазных напряжений и скольжения. Работоспособность предложенной усовершенствованной защиты от перегрузки асинхронного двигателя проверена на ПЭВМ с помощью методов математического моделирования на примере асинхронной машины номинальной мощностью 1000 кВт и напряжением статора 6 кВ типа VEM DKKAJ 4020-4.
2. Цель и задачи исследования
Целью исследования является рассмотрение усовершенствованного алгоритма защиты от перегрузки асинхронного двигателя с короткозамкнутым ротором, который позволяет дополнить стандартные защиты, и основанный на определении суммарной энергии потерь по данным замеров параметров текущего режима. Проверка алгоритма защиты от перегрузки на основе контроля энергии потерь, который опробован на использовании математической модели, основанной на полных дифференциальных уравнениях, описывающих асинхронный двигатель.
3. Анализ проблемы
В системе собственных нужд (СН) современных тепловых и атомных электрических станций в качестве основной электрической машины переменного тока, применяемой для электропривода механизмов и установок, являются асинхронные двигатели (АД) с короткозамкнутым ротором (КЗР) [1] . Несмотря на достаточно относительно высокую надёжность, обусловленную отсутствием изоляции короткозамкнутой обмотки ротора, контактно-щёточного аппарата и системы возбуждения, процент повреждаемости АД с КЗР довольно высокий и составляет примерно 25-30% согласно данным приведенным в [2-3]. В настоящее время на присоединениях «силовой кабель-АД с КЗР» системы СН наряду с аналоговыми и микроэлектронными комплектами релейной защиты (РЗ) используются цифровые системы РЗ (современные микропроцессорные терминалы). Использование микропроцессорной защиты позволило повысить надежность и удобство работы, а также сократить время обслуживания. Одним из главных преимуществ микропроцессорной релейной защиты является постоянная самодиагностика всех узлов и немедленное информирование дежурного и обслуживающего персонала об отклонениях или аварийных ситуациях. Система защиты оснащена устройством хранения информации, в котором сохраняются подробные данные о всех нарушениях нормального режима работы. Оперативная информация, выводимая на табло, позволяет персоналу своевременно распознавать или даже предотвращать аварийные ситуации. Основные электрические величины на табло показываются пофазно, что позволяет контролировать равномерность нагрузки и состояние контактов коммутационных аппаратов.
Существенным недостатком данной защиты является сравнительно маленький диапазон рабочих температур. Для корректной и надежной работы микропроцессорных устройств устанавливается климатическое оборудование. (обогрев, охлаждение.) Принимая во внимание стоимость и многофункциональность новейших защит, выбор предпочтительнее отнести к отечественным микропроцессорным блокам защит серии «Сириус», выпускаемых фирмой ЗАО «Радиус Автоматика».
В связи с вышеизложенным материалом выделим круг задач исследования:
1. Выбрать оптимальное решение для релейной защиты и автоматики асинхронных двигателей собственных нужд 0,4 кВ электростанций и рассчитать параметры срабатывания защит.
2. Проанализировать особенности работы и взаимодействие выбранных решений релейной защиты и автоматики асинхронных двигателей собственных нужд.
В большинстве случаев указанные системы реализуют стандартные защиты, рекомендуемые ПУЭ или стандартом IEEE [4-5], что негативно сказывается на корректной работе в ряде анормальных и аварийных режимов работы (РР), как например, работа при появлении несимметрии питающего напряжения, при обрыве стержней короткозамкнутой обмотки ротора, при ухудшении охлаждения машины и др. Существенно сократить повреждаемость возможно за счёт дальнейшего усовершенствования алгоритмов цифровых систем релейной защиты и автоматики (РЗиА) путём модернизации защиты от перегрузки, а также тепловой защиты асинхронной машины, способных корректно функционировать при появлении несимметрии питающего напряжения. Исходя из изложенного материала задача дальнейшего совершенствования цифровой релейной защиты асинхронных двигателей системы собственных нужд электростанций является актуальной.
4. Построение модели и результаты исследования
Работа АД с КЗР при возникновении несиметрии питающего напряжения, при обрыве фазы обмотки статора, при обрыве стержней короткозамкнутой обмотки приводит к появлению составляющей обратной поcледовательности (ОП) в токах и напряжениях, частота которой равна удвоенной промышленной частоте или 100 Гц. Ввиду присутствия явления вытеснения тока на переменном токе ток удвоенной промышленной частоты ОП вытесняется на поверхность обмотки короткозамкнутого ротора, что негативно влияет на дополнительный перегрев стержней. Длительная работа в подобных РР приведёт к перегреву медной обмотки изоляции статора, а также к оплавлению стержней обмотки КЗР, выполненной из алюминия, или приведёт к обрыву стержней медной или латунной беличьей клетки [3] , [6-7]. Поэтому исходя из вышеизложенного материала в данной работе уделим основное внимание развитию алгоритмов РЗ, способных корректно работать в несимметричных режимах. Как справедливо показано в [8] во многих моделях современных цифровых системах РЗиА ток ОП определяется очень грубо и только в некоторых режимах.
В данной работе будем использовать подход, описанный в [3] , c учетом зависимостей для качественного вычисления токов, напряжений и мощностей прямой поcледовательности (ПП) и ОП по данным замеров мгновенных значений фазных токов и напряжений, и оптимизированных для реализации в микропроцессорных терминалах РЗиА. Все расчёты в работе будет выполнять в системе относительных единиц (о.е.):

С целью устранения колебаний в сигналах токов и напряжений будем использовать усреднение токов и напряжений ПП и ОП по:
где m – количество точек, направляемых на усреднение (среднее значение 20-40 точек).
Для устранения выявленных в процессе анализа, недостатков стандартной ЗП, в работе предлагается модернизация защиты в виде контроля выделяемой энергии потерь (потери в обмотках статора и КЗР) в режимах перегрузки, обусловленной составляющими ПП и ОП. В процессе расчёта энергии потерь в качестве допущения не будем учитывать потери в стали магнитопровода статора.


где Rs – активное сопротивление обмотки статора в о.е., определяемое экспериментально по [9] или упрощённо, как показано в [10] ; s – величина скольжения АД, определяемая косвенно по методике, изложенной в [3] или измеряемая с помощью датчика угла положения ротора (ДПР); Q1 – энергия потерь в асинхронном двигателе, обусловленная составляющими ПП, о.е., Q2 – энергия потерь в асинхронном двигателе, обусловленная составляющими ОП, о.е., Qсум – суммарная энергия потерь в асинхронном двигателе, обусловленная составляющими ПП и ОП, о.е.
По логике триггером на включение процесса интегрирования или определения энергии потерь должен стать факт превышения тока электродвигателя свыше предельно допустимого значения, который равен уставке срабатывания классической ЗП по току статора АД. Ключевой особенностью предложенной защиты является превышение заданной уставки или предельно-допустимого значения суммарной энергии потерь, выделяемой в асинхронной машине за период двух следующих один за другим прямых пусков из холодного состояния при номинальной нагрузке на валу. Это обусловлено наличием обязательного требования, прописанного в пункте 2.5.12 правил технической эксплуатации электроустановок потребителей [11] , а также в паспорте электродвигателей, предоставляемого заводом-изготовителем.
Более точно значение уставки (QДОП) целесообразно определять экспериментально путём регистрации процессов двух пусков подряд из холодного состояния. Осциллографирование мгновенных значений фазных токов, фазных напряжений и скольжения желательно выполнять с использованием цифровых осциллографом, например, производства НПП «Рекон», компания «ПАРМА», ООО «Л Кард» и др.
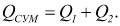
Альтернативным способом является использование математической модели, основанной на полных дифференциальных уравнениях, описывающих одноконтурную эквивалентную схему замещения (ЭСЗ) АД с учётом скин-эффекта в обмотке КЗР и наличием контура потерь в стали статора:
где w – угловая частота вращения ротора; m – мгновенное значение электромагнитного момента на валу; mc – момент сопротивления; J – суммарный момент инерции привода; Us –мгновенные значения напряжений статора по осям; Is – токи статора, ротора, контура потерь в стали магнитопроводе стали статора и ветви намагничивания по осям.
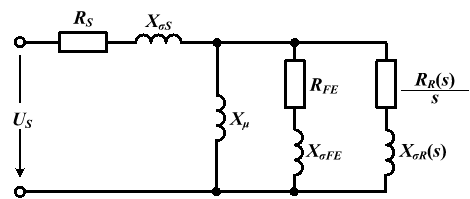
Рисунок 4.1 – Эквивалентная cхема замещения с одним контуром на роторе АД с КЗР
Для решения приведенной системы дифференциальных уравнений рекомендуется использовать метод Рунге-Кутта четвёртого порядка [12] . Параметры используемой ЭСЗ АД в относительных единицах определяем по методике, изложенной в [10] . Для учёта скин-эффекта в обмотке КЗР АД в математической модели используются нелинейные зависимости активных и индуктивных составляющих сопротивлений обмотки ротора:.

где ar и ax – коэффициенты, определяющие лобовые части обмоток ротора соответственно по активной и индуктивной составляющих сопротивления обмотки ротора АД; kr, kx – коэффициенты вытеснения, определяемые по известным отношениям для прямоугольного паза беличьей клетки ротора:

где h – ширина проводника, м.
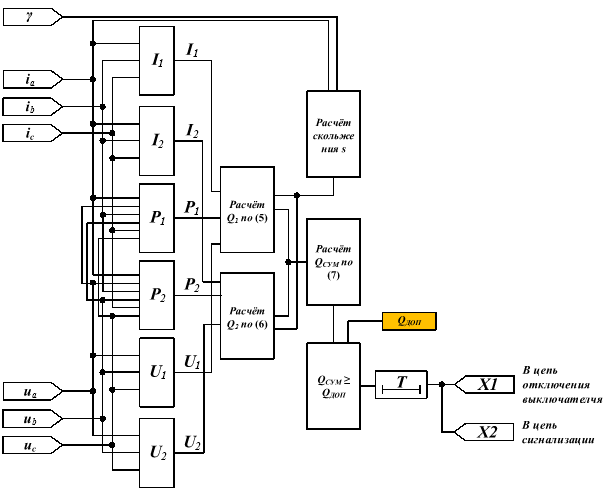
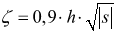
Рисунок 4.2 – Структурно-логическая схема модернизированной защитыот перегрузки АД с КЗР
Время допустимой перегрузки асинхронного двигателя равно такому значению времени, за которое интегрируемая микроконтроллером величина энергии потерь QСУМ достигнет уставки или допустимого значения энергии QДОП. Блок-схема защиты от перегрузки АД с КЗР, включающая последовательность операций за один такт работы микроконтроллера, приведена на рис.4.3.
Работоспособность предложенной усовершенствованной защиты от перегрузки АД с КЗР проверена на ПЭВМ с помощью методов математического моделирования для глубокопазного асинхронного двигателя типа VEM DKKAJ 4020-4 производства компании VEM Group® номинальной мощностью 1000 кВт и напряжением статора 6 кВ.
Рисунок 4.3 – Блок-схема защиты от перегрузки АД с КЗР, включающая последовательность операций за один такт работы микроконтроллера
В качестве примера, иллюстрирующего корректную работу предложенной в работе ЗП, на рис.4.4 и рис.4.5 приведены зависимости от времени t величин мощности ПП и ОП, токов ПП и ОП и суммарной энергии потерь, определённых по математической модели.
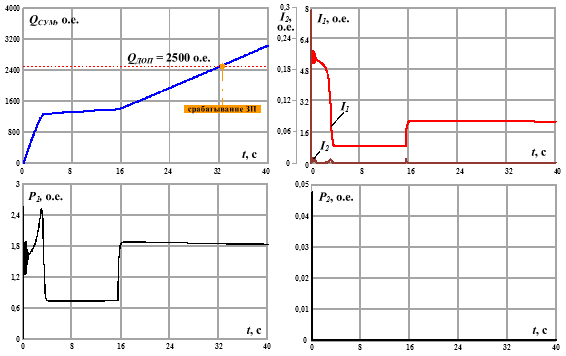
Рисунок 4.4 – Зависимости от времени (t) величин мощности ПП и ОП, токов ПП и ОП и суммарной энергии потерь для АД с КЗР типа VEM DKKAJ 4020-4 без наличия несимметрии напряжения
Из рис.4.4 и рис.4.5 видно, что ЗП на основе контроля энергии потерь работает правильно, как без наличия несимметрии, так и при наличии несимметрии. Значение уставки защиты в виде допустимой энергии потерь Qдоп = 2•1250 о.е., выделяемой за время прямого пуска, было рассчитано по математической модели при использовании коэффициента загрузки машины, равного 0,75. Превышение заданной уставки приводит к формированию дискретного сигнала о срабатывании ЗП. Как видно из рис.4.4 и рис.4.5, несмотря на одинаковый перегрузочный коэффициент, перегрузка асинхронной машины наступает на 7 с быстрее в режиме работы при наличии несимметрии равной 10% по сравнению с режимом без несимметрии, что подчеркивает правильный вектор совершенствования защиты с учётом суммарной энергии потерь, как от составляющей прямой, так и обратной последовательностей.
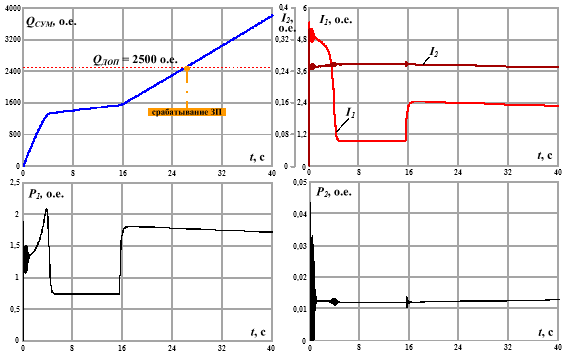
Рисунок 4.5 – Зависимости от времени (t) величин мощности ПП и ОП, токов ПП и ОП и суммарной энергии потерь для АД с КЗР типа VEM DKKAJ 4020-4 с наличием несимметрии напряжения
Следует отметить, что с целью повышения качества РЗиА асинхронных двигателей системы собственных нужд электростанций представленная в работе защита от перегрузки может быть дополнена комбинированной тепловой защитой, позволяющей косвенно контролировать температуру нагрева обмотки короткозамкнутого ротора на основе измерения режимных параметров [3] .
Выводы
1. В работе представлен подход к совершенствованию цифровой релейной защиты асинхронных двигателей системы собственных нужд электростанций путём модернизации защиты от перегрузки;
2. Основная идея предложенного алгоритма защиты заключается в расчёте и контроле выделяемой суммарной энергии потерь в режимах перегрузки, обусловленной составляющими прямой и обратной последовательностей по данным измерения мгновенных значений фазных токов, фазных напряжений и скольжения;
3. С целью повышения качества релейной защиты асинхронных двигателей системы собственных нужд электростанций представленная в работе защита от перегрузки может быть дополнена модернизированной тепловой защитой, позволяющей косвенно контролировать температуру нагрева обмотки короткозамкнутого ротора на основе измерения режимных параметров;
4. Работоспособность предложенной усовершенствованной защиты от перегрузки асинхронного двигателя проверена на ПЭВМ с помощью методов математического моделирования на примере асинхронной машины номинальной мощностью 1000 кВт и напряжением статора 6 кВ типа VEM DKKAJ 4020-4.
Список источников
- Корогодский В.И. Релейная защита электродвигателей напряжением выше 1 кВ / С.Л. Кужеков, Л.Б. Паперно – М.: Энергоатомиздат, 1987. – 248 с.
- Аббасова Э.М. Собственные нужды тепловых электростанций / Ю.М. Голоднов, В.А. Зильберман, А.Г. Мурзаков: под ред. Ю.М. Голоднова – М.: Энергоатомиздат, 1991. – 272 с.
- Сивокобыленко, В. Ф. Математическое моделирование комбинированной тепловой защиты глубокопазного асинхронного двигателя / В. Ф. Сивокобыленко, С. Н. Ткаченко // Электрические станции. – 2020. № 2 (1063). – С. 46-53.
- Правила устройства электроустановок. Все действующие разделы шестого и седьмого изданий с изменениями и дополнениями по состоянию на 01 февраля 2016 г. М.: КНОРУС, 2016. – 488 с.
- IEEE Recommended Practice for Motor Protection in Industrial and Commercial Power Systems (IEEE Std 3004.8™-2016) / Status: Active – Approved 7 December 2016. Date of Publication: 15 May 2017. – The Institute of Electrical and Electronics Engineers, Inc. 2016. – 163 p.
- Ziuzev, A. M. On Heating Induction Motor Rotor at Start-Up of High-Inertia Mechanisms [Text] / A. M. Ziuzev, V. P. Metelkov // Proceedings of 2018 17th International Ural Conference on AC Electric Drives (ACED). – 2018. – P.1-5.
- Галеева Р.У. Исследование влияния несимметрии напряжения по обратной последовательности на нагрев, срок службы и коэффициенты снижения номинальной мощности асинхронных электродвигателей / Р.У. Галеева, Д.С. Альмиева // Мировая наука, №. 4 (4), 2017, С. 112-117.
- Сушко В.А. Защита низковольтных электродвигателей. Совершенных устройств не существует [Электронный ресурс] / В.А. Сушко – М.: «Новости электротехники» – 2005. – №5(35). – Режим доступа к журн.: http://news.elteh.ru/arh/2005/35/11.php.
- ГОСТ 7217-87. Межгосударственный стандарт. Машины электрические вращающиеся. Двигатели асинхронные. Методы испытаний. Издательство стандартов, 2003. – 38 с.
- Павлюков, В. А. Совершенствование методов идентификации параметров эквивалентных схем замещения глубокопазных асинхронных двигателей / В. А. Павлюков, С. Н. Ткаченко // Электричество. – 2018. – № 10. – С. 54-60.
- Охрана труда: правила технической эксплуатации электроустановок потребителей: Утв. М-вом энергетики Рос. Федерации от 13.01.2003 № 6. – Москва : ИНФРА-М, 2003.
- Сивокобыленко В.Ф. Математическое моделирование в электротехнике и энергетике [Уч. Пособие] / В.Ф. Сивокобыленко – Донецк, РВА ДонНТУ, 2005. – 350 с.