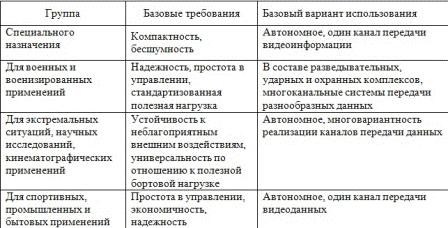
Бурное развитие современной микропроцессорной техники обеспечило благоприятные условия для развития малогабаритных мобильных дистанционно управляемых роботов. В табл.1 приведена укрупненная классификация мобильных роботов по их функциональному назначению.
Таблица 1 — Классификация мобильных роботов по функциональному назначению
В настоящее время в ряде университетов США по заказу министерства обороны исследуются вопросы создания роботизированных комплексов из негомогенных групп роботов и взаимодействия системы «человек — группа роботов». Создаются исследовательские и опытно-промышленные образцы роботизированных комплексов самого разного применения. Дистанционно пилотируемые летательные аппараты (ДПЛА) являются наиболее сложным типом автономных роботов и уровень их развития во многом определяет уровень направления в целом [1].
Настоящая работа представляет собой краткий обзор ситуации с мобильными роботами.
Мобильные роботы специального назначения
В силу специфики назначения таких роботов информации о них в открытой печати не много [2]. Летающие аппараты этого класса получили называние микролетательных (МЛА). В качестве примера можно указать МЛА «Black Widow», разработанный фирмой «АeroVironment Inc» совместно с UCLA и Caltech (Калифорнийским институтом технологии). Это один из первых аппаратов подобного класса, совершивший успешный полет в 1999 г. Другой совместный проект группы МЛА с машущими крыльями — MicroBat. Его крылья приводятся в движение электрическим мотором. Вес аппарата около 15 г, включая видеокамеру и систему управления.
Разрабатывают аппараты такого класса и старейшие американские авиастроительные компании — Lockheed Martin готовится к производству радиоуправляемого самолета «MicroStar», предназначенного для сбора информации, поиска целей и поддержки мобильной связи. На этот проект Пентагон выделил 42 млн. долларов.
Широко известен комплекс для сбора видеоинформации с труднодоступных объектов, таких как подземные коммуникации, на основе мобильного робота URBOT [3]. Робот снабжен двумя видеокамерами, передача информации производится посредством беспроводной сети RadioEthernet. Прием информации осуществляется оператором на телевизионный приемник с жидкокристаллическим экраном. Внешние виды указанных МЛА и мобильного комплекса URBOT приведены на рис.1.

Рисунок 1 — Внешние виды микролетательных аппаратов мобильного наземного робота («Black Widow», «MicroBat», «MicroStar», мобильный комплекс на базе робота URBOT)
Мобильные роботы для военных и военизированных применений
Разработка комплексов разведки и целеуказания на основе ДПЛА
проводиться в настоящее время всеми индустриально развитыми странами
мира. Можно констатировать тот факт, что интенсивно развивается новая
система вооружений, которая в кругах специалистов получила название
разведывательно-ударного комплекса (РУК) [1].
Современный РУК — это система, объединяющая в себе средства разведки, наведения, управления, средства огневого поражения и предназначенная для обнаружения и уничтожения наиболее важных одиночных и групповых подвижных объектов противника в глубине расположения его войск, независимо от метеорологических условий и времени суток [1].
Современный РУК — это система, объединяющая в себе средства
разведки, наведения, управления, средства огневого поражения и
предназначенная для обнаружения и уничтожения наиболее важных одиночных
и групповых подвижных объектов противника в глубине расположения его
войск, независимо от метеорологических условий и времени суток [1].
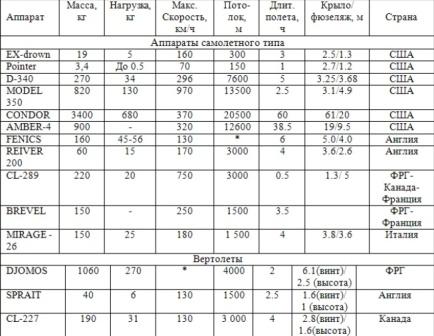
Известно, что военное ведомство США затратило около 10 млрд долларов на развитие данного направления. При выработке концепции военных применений ДПЛА были куплены все коммерчески поставляемые образцы и проведены их испытания c целью выработки требований и концепции развития направления ДПЛА военного применения. Выработанная по результатам исследований классификация приведена, например, в работе [1]. Некоторое представление о разнообразии существующих типов ДПЛА дает табл.2.
Таблица 2 — Тактико-технические характеристики БПЛА
Иллюстрацией одного из векторов развития направления военизированных комплексов является экспериментальный роботизированный охранный комплекс MDARS (США). Базой комплекса являются мобильные роботы, обеспечивающие патрулирование внутренних помещений, территорий за счет, как мобильных роботов, так и стационарных систем разграничения доступа, включенных в систему. Экспериментальная система предназначена для охраны воинских складов и разработана по контракту с министерством обороны США исследовательским центром SPAWAR System Center (Cан-Диего) [3]. В связи с возрастающей угрозой терроризма развитие этого направления становится в последнее время чрезвычайно актуальным.
Аппаратная составляющая комплекса иллюстрируется рис.2. Комплекс ориентирован на использование серийно выпускаемых решений и в настоящее время для организации информационного обмена между элементами комплекса используется беспроводная локальная IP-сеть на основе стандарта IEEE 802.11. Для передачи данных в последних экспериментах использовался канал 2,4 ГГц с суммарной пропускной способностью 11 Мбит/с. Для передачи видео и аудиоинформации широко используются в аппаратные и программные способы сжатия. Целью экспериментов в проекте MDARS являлось изучение широкого круга системных проблем: поведение аппаратного и программного обеспечения, тренировки операторов, изучения поведения каналов информационного обмена при «инсцинированных попытках прорыва в охраняемую зону» и т.п.
На основании тестов и опытной эксплуатации в течение трех месяцев были выработаны требования по усовершенствованию системы MDARS. В качестве примера можно указать следующие:
необходимо обеспечить отображение на экране монитора пункта централизованного наблюдения видеоинформации с четырех камер (вместо одной в тестировавшемся варианте системы);
необходимо обеспечить отображение всех типов тревожных сообщений, получаемых со стационарных датчиков, а не только наибольших значений тревожных сигналов;
для увеличения вероятности обнаружения проникновения отслеживать перемещения внутри охраняемого периметра при движении самого мобильного робота (в настоящее время детектирование наличия перемещений обеспечивается лишь при условии, что сам робот неподвижен).

Рисунок 2 — Пункт централизованного наблюдения

Рисунок 3 — Мобильный робот для патрулирования помещений, мобильный робот для патрулирования территорий

Рисунок 4 — Настенные сетевые сенсорно-исполнительные устройства
Мобильные роботы для научных, промышленных и сельскохозяйственных применений
Исследование поверхности Земли представляет собой обширную область научных исследований. Как правило, цели такого исследования индивидуальны в каждом конкретном случае, что определяет состав аппаратуры полезной нагрузки робота.
Аналогичные задачи возникают в районах стихийных бедствий с той лишь разницей, что в этом случае, как правило, фактор времени на подготовку и проведение такого «исследования» является определяющим. Как правило, аппаратура полезной нагрузки мобильного робота является штатной и хорошо освоенной эксплуатирующим персоналом.
Для промышленных и сельскохозяйственных применений уместнее использовать термин «мониторинг». Для задач такого класса характерным является относительная неизменность района и использование штатного состава полезной нагрузки. Одновременно с этим требуется обеспечить хранение и обработку больших объемов получаемой разнообразной информации. Это в свою очередь подразумевает наличие стационарных пультов управления, которые выполняют указанные функции.
Считается, что для широкого круга задач по исследования поверхности Земли наиболее подходящим является вертолет за счет своей маневренности и возможности зависать над выделенными участками. Дистанционно пилотируемые и автономные вертолеты или в других терминах мобильные роботы вертолетного типа, обладают рядом преимуществ по сравнению с пилотируемыми аппаратами. На рис. 3 показан автономный робот-вертолет Yamaha R-MAX, используемый в научных исследованиях в университете Карнеги Мелон (США). К настоящему времени на рынок сельскохозяйственных применений поставляется автономный вертолет Yamaha R-50 [5], предназначенный для сельскохозяйственных применений. Вертолет пилотируется с расстояния до 150 м подготовленным оператором посредством высокоуровневых команд.
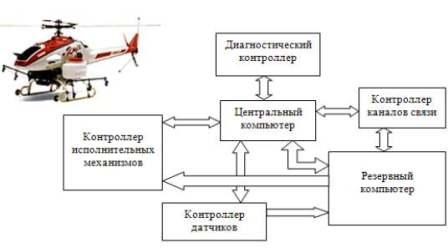
Рисунок 5 — Автономный вертолет Yamaha R-MAX и структура его системы управления
Система управления вертолетом R-50 обеспечивает возможность полета как по командам оператора, так и автономно по программе, обеспечивая автоматический возврат в точку запуска и посадку при возникновении любых неполадок (полного расхода горючего, потере связи с землей и др.). На борту вертолеты Yamaha несут три цветных видеокамеры, включая одну поворотную, и при собственной массе в 40 и 83 кг (R-50 и R-MAX, соответственно) имеют полезную нагрузку в 15 и 30 кг. R-MAX благодаря системе GPS может автоматически позиционировать себя в пространстве с точностью до 1 м по всем трем координатам. Обслуживание аппаратов очень простое, запуск двигателя осуществляется встроенным электростартером, а взлетать и садиться они могут на любой горизонтальной площадке размером 3х3 м. Топливо-автомобильный бензин А-95, максимальное полетное время — полтора часа.
Структура системы управления автономного вертолета робота показана на рис.5. С 1994 г. ведутся работы по созданию системы управления для этих вертолетов на основе нечеткой логики.
C 1988 года фирма Yamaha продала более 1200 таких аппаратов, причем их цена настолько низка, а эксплуатация проста, что в Японии их широко используют для опыления рисовых полей ядохимикатами вместо стандартной сельхозавиации. Эти аппараты приобретает NASA, ряд правительственных агентств США.
По целому ряду причин, на сегодня, можно констатировать наличие серьезного отставания уровня развития подобного класса мобильных роботов в России от США, Японии и даже Китая. Разработки такого класса ведутся в настоящее время группами энтузиастов, при явно недостаточном уровне ресурсного обеспечения.
Список литературы
-
Астапкович А.М., Анисимов А.Л., Елисеенко А.Г., Суханов И.О. Современные тенденции построения систем управления дистанционно-пилотируемыми летательными аппаратами. // В кн.: Информационно-управляющие системы для подвижных объектов.— СПб: Политехника, 2002. — С. 7 —32
- Ресурс Интернет http://microavia.narod.ru/mav.htm
- Ресурс Интернет http://www.spawar.navy.mil/robots/
Вверх