УДК 622.232
Д.т.н., проф. Горбатов П.А.
Донецкий национальный технический университет, Донецк, Украина
НАУЧНЫЕ ОСНОВЫ РАЗРАБОТКИ МЕХАТРОНИЧЕСКИХ ПОДСИСТЕМ ПРИВОДОВ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ ПРОХОДЧЕСКИХ КОМБАЙНОВ
Объектами исследований в настоящей работе явились проходческие комбайны стреловидного типа, оснащенные аксиальными фрезерными исполнительными органами, при реализации современных технологических схем обработки забоя на основе доминирующих поворотных перемещений стрелы в горизонтальной плоскости.
Основными управляемыми при изменении свойств разрушаемых массивов режимными параметрами для проходческих комбайнов стреловидного типа могут быть:
- скорость перемещения Vn исполнительного органа в составе подсистемы его подвески и перемещения (подсистемы ППО) при последовательной обработке забоя;
- скорость резания Vp для резцов фрезы в составе подсистемы привода исполнительного органа (подсистемы ПИО);
- одновременно скорости Vn и Vp (двухпараметрическое регулирование).
Для бесступенчатого или многоступенчатого изменения скорости Vn используется дроссельное или объемное регулирование гидропередачи «насос -исполнительные гидроцилиндры». При этом более совершенным, безусловно, является объемное регулирование на основе насосов с регулируемой подачей, т.к. дроссельный вариант характеризуется низким КПД и существенным нагревом рабочей жидкости.
При обработке забоя с крепкими породами и использовании известного алгоритма автоматизированного управления скоростью Vn, обеспечивающего стабилизацию на заданном уровне среднего значения мощности Рр асинхронного с короткозамкнутым ротором электродвигателя подсистемы ПИО при Vp = const, может проявляться недостаток этого варианта, когда из-за необходимости регулирования толщин стружки на резцах (h = var) имеют место потери теоретической производительности (Q = var).
Альтернативный вариант однопараметрического бесступенчатого или многоступенчатого автоматизированного управления скоростью Vp может быть реализован при построении подсистем ПИО на базе современных частотно-регулируемых асинхронных электродвигателей с короткозамкнутым ротором, что представляется особенно актуальным для выемки крепких пород. В этом случае целесообразно использовать алгоритм управления, соответствующий стабилизации среднего уровня момента на валу исполнительного органа (ИО) Мр = const при h = var, Pp = var, Vn = const, Q = const (известные изменения Vn и Q (порядка до 10 - 20 %) при поворотных перемещениях стрелы, обусловленные кинематикой подсистемы ППО, в настоящей работе, носящей концептуальный характер, в первом приближении не рассматриваются). При таком построении подсистемы ПИО появляется возможность значительно повысить технико-экономический уровень тяжело нагруженного редуктора привода ИО на основе упрощения его конструкции и улучшения параметров надежности.
Вариант двухпараметрического регулирования (Vn = var, Vp = var), соответствующий стабилизации толщин стружки на резцах (h = const) при Мр = var, Рр = const и Q = var, по нашему мнению, представляется весьма технически сложным и требует целенаправленных исследований и обоснования его технико-экономической целесообразности.
Рассмотрим предлагаемую концепцию проектирования подсистем ПИО проходческих комбайнов на базе частотно-регулируемого асинхронного электропривода с короткозамкнутым ротором с бесступенчатым или многоступенчатым управлением режимным параметром Vp в соответствии с приведенным выше алгоритмом.
Известно [1], что работоспособными такие подсистемы могут быть только на базе автоматизированного управления. Поэтому при их проектировании должен обеспечиваться мехатронический подход, т.е. рассматриваемые подсистемы должны создаваться как органически целостные электро-механо-электронные системы, включающие в качестве изначально одинаково важных, технически равноправных не только электрические и механические структурные единицы, но и аппаратуру автоматизации.
Рассмотрим отличительные особенности нетрадиционных этапов итерационного характера при проектировании мехатронических подсистем ПИО исполнений проходческих комбайнов, предназначенных для обработки забоев с крепкими породами.
I. Установление исходных данных для проектирования. Для этой цели на основе требований заказчика и учета ограничивающих факторов с использованием метода экспертных оценок задаются:
- требуемым максимальным значением предела прочности разрушаемых пород при одноосном сжатии асжв;
- оценками значений минимально допускаемой теоретической производительности QH и максимально допускаемых удельных энергозатрат при резании WаBB, которые можно считать приемлемыми при разрушении пород;
- исходным (первым) пакетом значений параметров, обеспечивающих достижение QH: величины заглубления ИО в массив Bз1, толщины разрушаемого слоя Нс1 (эти параметры также относятся к управляемым режимным) и рабочей скорости подачи Vnp1;
- максимальным при автоматизированном регулировании значением скорости резания Vpв; при этом необходимо иметь ввиду, что в соответствии с результатами исследований Донгипроуглемаша [2] целесообразно отдавать предпочтение диапазону Vp примерно до 2 м/с, т.к. при выемке крепких и абразивных пород при более высоких значениях Vp резко интенсифицируется износ резцов.
II. Определение значения скорости подачи Vn1, соответствующего обеспечению заданных в качестве исходных данных удельных энергозатрат WBB при реализации асжв и Vpв.
Для этого:
- при выбранных значениях асжв, Bз1 и Hc1 на базе ОСТ 12.44.197- 81 (или других методик при их наличии) выполняется построение оценочных зависимостей момента на валу ИО Mв1 = Mв1 (h) и удельных энергозатрат Wв1 = Wв1 (h) от толщин стружки h, см. рисунок;
- определяется наименьшее при автоматизированном управлении значение толщины стружки hн1, соответствующее заданному значению WBB;
- находится оценочное значение скорости подачи Vn1, соответствующее реализации параметров hн1 и Vpв (m - число резцов в линиях резания):
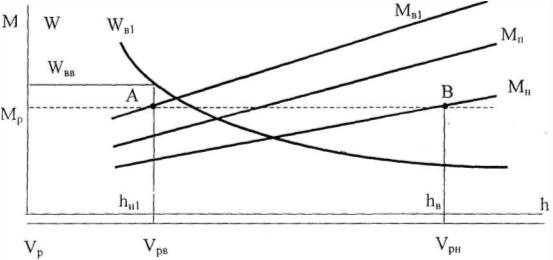
Рисунок - Установление основных параметров подсистем ПИО
III. Установление параметров, обеспечивающих достижение заданных значений QH, WBB при реализации aсжв:
- если выполняется соотношение Vn1 >= Vnp1, то требование второго подэтапа I этапа выполнены и можно переходить к выполнению этапа IV;
- если Vnl < Vnp1, тo:
- формируется второй пакет значений параметров Вз2, Нс2, Vnp2, обеспечивающих достижение заданного значения QH;
- по схеме, изложенной в содержании этапа II, для указанного выше пакета выполняется построение зависимостей Мв2 = Мв2 (h) и WB2 = WB2 (h), находятся значения hH2 и Vn2;
- работа, содержание которой изложено в подэтапе 2 III этапа, повторяется до тех пор, пока в результате i-й итерационной процедуры не будет достигнуто соотношение Vni >= Vnpi; после этого можно переходить к выполнению этапа IV;
- или все же не удается обеспечить выполнение условия Vni > Vnpi, то необходимо вернуться к этапу I и на базе соответствующих компромиссов смягчить требования к QH, WBB или даже к асжв.
Следует иметь ввиду, что реализация значений рабочей Vnp (методика определения приведена выше) и маневровой Vnм (для быстрых перегонов ИО) скоростей подачи может быть обеспечена путем подключения к исполнительным гидроцилиндрам разного числа нерегулируемых насосов или секций нерегулируемого насоса, что соответствует самому простому исполнению подсистем ППО.
IV. Выполнение эскизного проекта редуктора и выбор электродвигателя подсистемы ПИО:V. Установление нижнего значения предела прочности разрушаемых пород при одноосном сжатии aсжн, обеспечиваемого рассматриваемым исполнением подсистемы ПИО:
- определяют требуемый средний уровень момента на валу исполнительного органа Мр как ординату точки А, см. рисунок;
- эскизное проектирование редуктора должно осуществляться на базе следующих подходов: - ось электродвигателя должна быть параллельна оси ИО, что позволяет избавиться от конических зубчатых колес, обладающих рядом весьма существенных недостатков, такими как: пониженная несущая способность, необходимость регулировки при сборке положения колес конической пары с целью получения требуемого пятна контакта зубьев, повышенная чувствительность к перекосам валов, наличие осевых усилий и необходимость установки осевых подшипников, воспринимающих эти усилия, усложненная конструкция валов в сборе, которые в своей совокупности значительно ухудшают показатели надежности редуктора; - стремятся к проектированию наиболее короткой кинематической цепи в пределах компоновочных и габаритных возможностей на основе цилиндрических зубчатых передач с минимальным количеством силовых элементов и минимально возможным передаточным числом Ир; - при формировании на ИО момента Мр соответствующими конструкторскими и технологическими решениями должны быть обеспечены требуемые прочностные запасы наименее жизнестойких структурных элементов (зубчатых колес, валов, подшипников и др.);
- реализация момента Мр должна соответствовать области устойчивой работы выбранного асинхронного электродвигателя с короткозамкнутым ротором, т.е. должно выполняться условие:

где Муст - устойчивый момент электродвигателя,
nр- КПД редуктора;- в случае, если габаритные ограничения являются столь жесткими, что не позволяют добиться необходимых прочностных запасов деталей редуктора или установить электродвигатель с требуемыми силовыми параметрами, то следует вернуться к этапу I для смягчения требований к соответствующим исходным данным на основе компромиссного подхода.
- исходя из ограничения по вылету резцов, определяется наибольшая при автоматизированном управлении толщина стружки hB и соответствующая ей скорость резания Vpн (значение Vпp установлено ранее);
- путем построения промежуточных зависимостей Mп1 = Мп1(h), Мп2 = Мп2(h) и т.д. при понижающихся значениях aсж1 < aсжв, aсж2 < aсж1 и т.д. находят aсжн, соответствующее оценочной прямой Мн = Мн(h), проходящий через точку В, см. рисунок.
То, окончательно устанавливается область применения исполнения проходческого комбайна с мехатронической подсистемой ПИО по пределу прочности разрушаемых пород aсж е [aсжн; aсжв]. Одновременно находится требуемый диапазон автоматизированного регулирования частоты вращения ИО nоб e [nобн; nобв], соответствующий диапазону изменения скорости резания Vp e [Vpн;Vpв].
Рассмотрим предлагаемые принципы формирования искусственных статических механических характеристик асинхронных электродвигателей мехатронических подсистем ПИО на основе регулируемого по частоте f и величине действующего значения U напряжения питания электропривода.
Преобразовательная станция должна обеспечивать реализацию управляющего алгоритма в соответствии с правилом М.П.Костенко:
При этом регулирование f и U должно осуществляться вниз от номинальных значений этих параметров, т.е f < fc и U < Uн, где fc = 50 Гц и Uн - номинальные значения рассматриваемых параметров.
Указанный алгоритм управления скоростью Vp обеспечивает практическую стабилизацию:
а) среднего уровня момента на валу электродвигателя Мр (Ир, ?р)-1 в диапазоне частот вращения ротора электродвигателя w e [wн; wв], соответствующем диапазону частот вращения ИО nоб e [nобн; nобв] ;
б) перегрузочной способности электродвигателя по отношению к реализуемому на ИО моменту Мр, т.к. оценочно:
где Мк - критический момент электродвигателя в условиях питания от реальной сети;
р - число пар полюсов;
L1, L2' - индуктивности статора и приведенная ротора;
а - коэффициент пропорциональности.
В заключение следует подчеркнуть, что в соответствии с вышеизложенным сценарием можно проектировать мехатронические подсистемы ПИО проходческих машин для конкретных условий эксплуатации, т.к. разработанная концепция обеспечивает высокий уровень адаптации комбайнов к индивидуальным заказам потребителей.
СПИСОК ЛИТЕРАТУРЫ
1. Горбатов П.А., Петрушкин Г.В., Лысенко Н.М. Горные машины и оборудование - В 2-х т. ТЛ - Донецк: РИА ДонНТУ, 2003. - 295 с.
2. Мизин В.А., Мизин СВ. Обоснование кинематической схемы привода исполнительного органа проходческого комбайна для оптимизации режимов разрушения пород различной крепости // Инженер. - Донецк: ДонНТУ, 2003. № 3. - С. 144 - 146.
Автор: Горбатов П.А. Горный информационно-аналитический бюллетень. – М.: МГГУ, 2004.
ДонНТУ> Портал магистров ДонНТУ> |Главная | Реферат | Библиотека | Ссылки | Отчет о поиске | Индивидуальное задание