
Оригинал статьи http://www.polach.ch/polach/pdf/VSD_Paper_ICTAM_2000.pdf
Библиотека
Стандартные методы динамики транспортного средства исследуют только часть комплекса механотроник системы железнодорожных транспортных средств тяги. Исследовать например влияние тягового усилия локомотива на силы между колесом и рельсом в кривой, влияние параметров управления тяги на силы рельса колеса, на динамическое поведение локомотива или поезда и т.д., механики, электрики и электроники должно моделироваться одновременно. Модель сил рельса колеса, используемых в таких компьютерных моделированиях должна содержать свойства, необходимые для динамики транспортного средства так же как для диска оси и динамики управления тяги. Это не возможное использование стандартных методов и нуждается в адаптации моделей, используемых для вычисления тангенциальных сил между колесом и рельсом в динамике транспортного средства. Быстрый метод для вычисления сил рельса колеса, развитых автором был расширен, чтобы упомянуть выше свойства и проверен по сравнениям с размерами. Прикладные примеры иллюстрируют влияние локомотива тяговое усилие на силах между колесом и рельсом. Другой прикладной пример представляет исследование{расследование} комплекса mechatronic система управления тяги и динамики транспортного средства
• точная теория Колкера (программируют КОНТАКТ),
• упрощенная теория Колкера (программируют FASTSIM),
• таблицы просмотра
• упрощенные формулы и функции насыщенности.
Точная теория Колкера (компьютерный КОНТАКТ программы [5]) не использовалась в моделированиях из-за его очень долгого времени вычисления. Упрощенная теория, используемая в программе Колкера, FASTSIM [3] намного быстрее чем точная теория, но время вычисления, - все еще относительно жаждут сетевого вычисления в сложных системах мультитела. FASTSIM используется например в железнодорожных инструментах моделирования транспортного средства ADAMS/Rail, MEDYNA, SIMPACK, GENSYS, VOCO. Другая возможность для компьютерных моделирований состоит в использовании таблиц просмотра с сохраненными предрасчетными значениями (ADAMS/Rail, VAMPIRE). Из-за ограниченных данных в таблице просмотра, есть различия для точной теории также. Большие таблицы более точны, но поиск в таких больших таблицах потребляет время вычисления. Ища более быстрые методы некоторые авторы нашли приближения основанными на функциях насыщенности (например. Vermeulen-Johnson [12], Shen-Hedrick-Elkins [11]). Время вычисления, используя эти приближения коротко, но есть существенные различия для точной теории особенно в присутствии вращения. Простые приближения часто используются как быстрая и менее точная альтернатива стандартным методам (например, MEDYNA, VAMPIRE, SIMPACK). Очень хороший компромисс между временем вычисления и необходимой точностью позволяет быстрый метод для вычисления сил между рельсом и колесом, развитых автором [7], [8]. Несмотря на используемые упрощения, учтено вращение. Из-за короткого времени вычисления, метод может использоваться вместо программы Колкера FASTSIM, чтобы экономить время вычисления или вместо функций приближения, чтобы улучшить точность. Предложенный метод использовался в моделированиях в различных программах с 1990. Алгоритм осуществлен в ADAMS/Rail как альтернативная параллель к FASTSIM и к Книге таблицы. Время вычисления быстрее чем FASTSIM's и обычно быстрее чем Книга таблицы также. Предложенный алгоритм обеспечивает сглаживание сил контакта по сравнению с Книгой таблицы и в течение интеграции нет никаких проблем конвергенции. Программа была проверена как пользовательская рутина в программах: SIMPACK, MEDYNA, SIMFA и собственные программы различного пользователя с очень хорошим опытом. Предложенный метод предполагает эллипсоидальную область контакта с половиной оси контактного эллипса a, b и нормальным распределением напряжения согласно Герц. Максимальное значение тангенциального напряжения r в любом произвольном пункте

Коэффициент трения принят постоянным в целой области контакта. Решение, описанное в [7], [8] получает проистекающую тангенциальную силу (без вращения) как
где Q - загрузка колеса
e - градиент тангенциального напряжения в области прилипания

где C - коэффициент пропорциональности, характеризующий эластичность контакта a, b- половина оси контактного эллипса
s - проскальзывание


где sx, sy – проскальзывание в продольном (x) и боковом (y) направлении
V - скорость транспортного средства.
wx, wy - скорость проскальзывания (скольжения) в продольном (x) и боковой (y) направления
Используя линейную теорию Колкера выражать коэффициент C, имеет уравнение (3)
тогда форма (в случае только продольный ползают),

где c11 - коэффициент Колкера для продольного направления [2].
Вычисление тангенциальных сил для общего случая с комбинацией продольного и бокового проскальзывания, и вращение допускает компьютерный код, изданный в [8].
Предложенный метод был проверен, делая сравнение между изгибающимся использованием вычислений поведения для вычисления сил между колесом и рельсом программой FASTSIM и предложенный метод, в сравнении с размерами. Модель четырех осей SBB 460 локомотивов швейцарских Федеральных Железных дорог была построена посредством инструмента моделирования ADAMS/Rail. Дизайн локомотива объединяет очень хорошее выполнение изгиба с высокой максимальной скоростью из-за сцепления комплекты колеса, осознанного механизмом с относящейся к скручиванию шахтой, собранной к раме тележки. Модель, используемая в моделированиях состоит из 51 твердого тела и содержит 266 степеней свободы.
Однако, во время вычисления есть существенное различие. Результаты, вычисленные, используя предложенный метод показывают хорошему совпадению с размерами измерениями. Особенно в случае продвижения wheelsets, они ближе к фактически взвешенным значениям чем результаты, полученные в моделированиях, используя FASTSIM.
3. РАЗЛИЧИЯ МЕЖДУ ДИНАМИКОЙ ТРАНСПОРТНОГО СРЕДСТВА И ДИНАМИКОЙ ДИСКА ОСИ.
В зависимости от цели испытаний, различные другие взвешенные функции полза-силы могут быть найдены в литературе [6], из-за разнообразия размеров, различные модели используются для того же самого физического явления - вызывает между колесом и рельсом - в динамике транспортного средства и динамике диска оси (рис. 1). Как это возможно? Причины для этого – различные области параметров и различных областей исследований.
В маленькой динамике транспортного средства скольжение, имеет главное значение. Тангенциальные силы в продольном так же как в боковых направлениях влияют на поведение транспортного средства, поэтому продольное и боковое скольжения, так же как вращение должно быть принято во внимание. Основанное на теории прокручивающегося контакта, скользящие силы зависят от скольжения как безразмерное значение. Коэффициент трения, как предполагают, является постоянным. Различие между сухими и влажными условиями обычно выражается только со значением коэффициента трения а не с изменением градиента функции
силы скольжения.
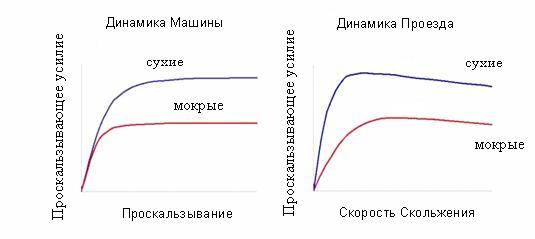
Рис. 2. Различия между типичными функциями силы скольжения, используемыми в динамике транспортного средства и в оси управляют динамикой.
В динамике диска большие значения продольных скольжений влияет ее поведение. В моделируемых системах обычно только продольное направление принято во внимание, основанное на экспериментах, силы скольжения силы обычно принимаются как зависящий от скорости промаха между колесом и рельсом. Есть максимум функции силы скольжения, так называемого оптимума прилипания, и уменьшающегося раздела позади этого максимума. Градиент и форма функций силы скольжения для влажных, сухих или других условий отличны.
4. МОДЕЛЬ СИЛ МЕЖДУ РЕЛЬСОМ И КОЛЕСОМ, ПОЛЕЗНЫХ ДЛЯ МОДЕЛИРОВАНИЯ ДИНАМИКИ ТРАНСПОРТНОГО СРЕДСТВА И ВЗАИМОДЕЙСТВИЯ ДИНАМИКИ ДИСКА ОСИ.
Для сложного моделирования динамического поведения локомотива или транспортного средства тяги на подключении с динамикой диска и управлением тяги, высоко продольным скольжением, и уменьшающийся раздел функции силы скольжения позади предела прилипания должен быть принят во внимание. Различные модели рельса колеса, описанные выше должны быть превращены в одну модель, которая является подходящей и для динамики транспортного средства и для моделирований динамики диска. Закон силы скольжения с отмеченным оптимумом прилипания может быть оформлен, используя коэффициент трения, уменьшающийся с увеличивающимся промахом, скорость между колесом и рельсом. Зависимость трения на скорости промаха была соблюдена различными авторами и описана например в [6], [9]. Переменный коэффициент трения может быть выражен следующим уравнением

где fo-максимальный коэффициент трения
w - величина промаха (скольжения) скоростной вектор [м/с]
B - коэффициент показательного уменьшения трения [c/м]
A - отношение коэффициента f трения предела в бесконечности скользит скорость к максимуму коэффициент трения fo , A = f / fo.
С точки зрения тягового усилия и динамики тяги ползающийся закон для плохих условий{состояний} прилипания имеет главное значение: влажный рельс и поверхностное загрязнение например масло, грязь, влажность. Даже для сухих условий градиент функций силы скольжения обычно ниже чем теоретическое значение. Причина этого - уровень влажности, которая может быть учтена в "коэффициенте неподвижности" поверхностной почвы [4]. В динамике транспортного средства, эти условия реально приняты во внимание просто с сокращением Колкера, коэффициенты скольжения [2]. Этот метод используется для линейного, скользящий закон силы, но может использоваться вообще также.
library