"Моделирование управляемой магнитной цепи"
В данной работе ставится задача аналитического исследования свойств управляемого дросселя, а также влияние на эти свойства цепей управления и обратной связи.
На рис.1 приведена схема управляемого компенсирующего дросселя [1].
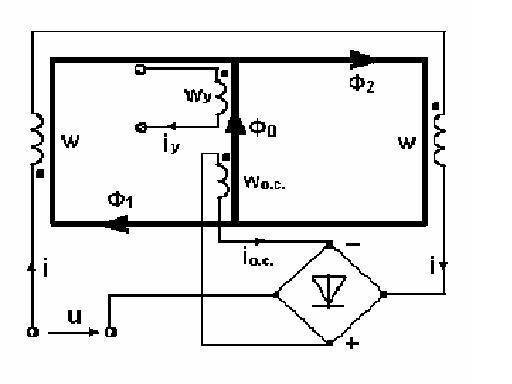
Рисунок 1 - Схема управляемого компенсирующего дросселя
Она содержит Ш-образный ферромагнитный сердечник, на крайних стержнях которого расположены рабочие обмотки w, включенные последовательно и согласно. По ним же замыкаются основные магнитные потоки Ф1 и Ф2 . На среднем стержне расположены обмотка управления wy, обмотка обратной связи wос, и замыкается поток подмагничивания Ф0. Рабочие обмотки w крайних стержней питаются от источника синусоидального напряжения u = Uм • sin(ωt+ψ).
Что касается среднего стержня, то его обмотка обратной связи wос питается выпрямленным током рабочих обмоток, а обмотка управления wу имеет независимый источник питания.
Система уравнений
Магнитная цепь рис. 1 описывается системой нелинейных уравнений, связывающих сумму потоков в одном из узлов цепи (первый закон Кирхгофа), и суммарные магнитные напряжения и суммарные намагничивающие силы двух независимых контуров (второй закон Кирхгофа):
Ф1 + Ф0 = Ф2 ;
H(B1)• l1 + H(B2)• l2 + (B1• δ1+ B2• δ2) / μ0 = 2•i•w ;
H(B0)• l0 + H(B2)• l2 + (B0• δ0+ B2• δ2) / μ0=•|i|•woc + F0 + i•w ;
где H – напряженность магнитного поля;
Bk = Фk / Sk – индукция в стержнях магнитопровода (к =0, 1, 2);
lk, Sk – длина средней линии и сечение стержней магнитопровода;
δk –длина воздушных зазоров стержней;
i – мгновенное значение тока рабочих обмоток;
F0 = iy • wy – намагничивающая сила обмотки управления;
H(B) – аппроксимированная кривая намагничивания.
В свою очередь напряжения рабочих обмоток дросселя связаны с источником питания уравнением:
w •d(Ф1 + Ф2) / dt – i•(2•r + roc) = Uм • sin(ωt+ψ), (1)
где r, roc – активные сопротивления рабочих обмоток и обмотки обратной связи;
Um , ψ – амплитуда и начальная фаза питающего напряжения.
Обратим внимание на то, что дифференциальное уравнение (1) не разделяет суммарное приращение магнитных потоков и, следовательно, не может быть представлено в форме Коши. Это значит, что к решению нашей задачи нельзя применить хорошо отработанные методы интегрирования типа, например, Рунге-Кутта. Исходя из изложенного, перепишем его непосредственно в приращениях для к-того шага.
Δ(Ф1 + Ф2)k = [Um • sin(ωt+ψ) – ik•(2•r + roc)•Δt] / w. (2)
Выражение (2) позволяет на к-том шаге определить суммарное приращение магнитных потоков.
Далее возможно определение суммы рабочих потоков, являющейся исходной информацией для к+1-го шага:
(Ф1 + Ф2)k+1 =(Ф1 + Ф2)к + Δ(Ф1 + Ф2)k . (3)
Выражения (2, 3) не разделяют ни рабочих магнитных потоков дросселя, ни их приращений. Для получения значений потоков стержней на к+1-ом шаге необходимо совместное решение уравнений (2, 3) и нелинейной системы (1). Подобная задача, как правило, решается или при помощи специально разработанного решающего блока или нелинейного блока, подобранного из библиотеки программных средств и «подогнанного» к условиям нашей задачи.
Таким образом, полученные соотношения являются математической моделью рассматриваемой цепи. Они связывают в одну систему три ее магнитных потока ток рабочих обмоток. Упрощенный алгоритм решения задачи приведен на рис. 2. Основная идея алгоритма состоит в том, что на заключительной стадии к-того шага интегрирования при помощи зависимости (2) определяется суммарное приращение двух рабочих потоков (Ф1 + Ф2)k. Затем при помощи зависимости (3) определяется сумма потоков (Ф1 + Ф2)k+1 , но уже для к+1-го шага. Эти данные становятся исходными для последующего определения всех переменных состояния системы для к+1-го шага путем решения системы (1).
Таким образом, управляемая нелинейная индуктивность позволяет компенсировать емкостную составляющую токов утечки при двукратном изменении длины кабельной сети. Наличие незначительных по величине высших гармоник в составе тока (наибольшая из них – третья гармоника не превышает 13 %) не может сказаться на компенсирующих возможностях дросселя или его безопасности с точки зрения резонансных перенапряжений ни в статических ни в динамических режимах. Можно считать, что «целесообразность применения нелинейной индуктивности для компенсации емкостной составляющей токов утечки» аналитически доказана. Однако влияние положительной обратной связи в цепи подмагничивания среднего стержня, а также цепи измерения емкости кабельной сети нуждаются в дальнейшем анализе.
Библиографический список
1. Справочник энергетика угольной шахты: В 2т. / В.С. Дзюбан и др. – Донецк: ООО «Юго-Восток, Лтд» 2001. Т 1.: – 447 с.