"Моделирование управляемой магнитной цепи аппаратов защиты от утечек"
Отримано математичну модель керованого нелінійного дроселя для компенсації ємнісних струмів витоку. Встановлено, що струм дроселя практично синусоїдний і вищі гармоніки не впливають на його ком-пенсуючі та регулювальні властивості.
При эксплуатации шахтных участковых сетей с изолированной нейтралью широко используются устройства контроля изоляции и защитного отключения (УАКИ, АЗАК, и др.), содержащие дроссель для компенса-ции емкостной составляющей тока утечки на землю. В ряде устройств индуктивность дросселя регулируется в зависимости от длины кабельной сети (и, следовательно, от ее емкости по отношению к земле) путем под-магничивания постоянным током [1]. Известны мнения специалистов о том, что наличие индуктивности в одной цепи с емкостями кабелей представляет потенциальную опасность аварийных ситуаций вследствие резонансных перенапряжений [2].
На рис.1 приведена схема управляемого компенсирующего дросселя [1].
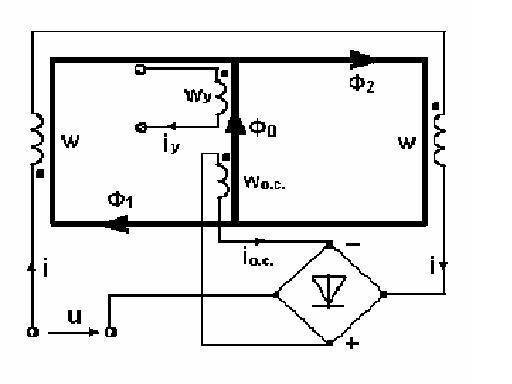
Рисунок 1 - Схема управляемого компенсирующего дросселя
Она содержит Ш-образный ферромагнитный сердечник, на крайних стержнях которого расположены рабочие обмотки w, включенные последовательно и согласно. По ним же замыкаются основные магнитные потоки Ф1 и Ф2 . На среднем стержне расположены обмотка управления wy, обмотка обратной связи woc, и замыкается поток подмагничивания Ф0. Рабочие обмотки w крайних стержней питаются от источника синусоидального напряжения u = Uм • sin(ωt+ψ). Что касается среднего стержня, то его обмотка обратной связи wос питается выпрямленным током рабочих обмоток, а обмотка управления wy имеет независимый источник питания.
Магнитная цепь рис. 1 описывается системой нелинейных уравнений, связывающих сумму потоков в одном из узлов цепи (первый закон Кирхгофа), и суммарные магнитные напряжения и суммарные намагничивающие силы двух независимых контуров (второй закон Кирхгофа):
Ф1 + Ф0 = Ф2 ;
H(B1)• l1 + H(B2)• l2 + (B1• δ1+ B2• δ2) / μ0 = 2•i•w ;
H(B0)• l0 + H(B2)• l2 + (B0• δ0+ B2• δ2) / μ0=•|i|•woc + F0 + i•w ;
где H – напряженность магнитного поля;
Bk = Фk / Sk – индукция в стержнях магнитопровода (к =0, 1, 2);
lk, Sk – длина средней линии и сечение стержней магнитопровода;
δk –длина воздушных зазоров стержней;
i – мгновенное значение тока рабочих обмоток;
F0 = iy • wy – намагничивающая сила обмотки управления;
H(B) – аппроксимированная кривая намагничивания.
В свою очередь напряжения рабочих обмоток дросселя связаны с источником питания уравнением:
w •d(Ф1 + Ф2) / dt – i•(2•r + roc) = Uм • sin(ωt+ψ), (1)
где r, roc – активные сопротивления рабочих обмоток и обмотки обратной связи;
Um , ψ – амплитуда и начальная фаза питающего напряжения.
Обратим внимание на то, что дифференциальное уравнение (1) не разделяет суммарное приращение магнитных потоков и, следовательно, не может быть представлено в форме Коши. Это значит, что к решению нашей задачи нельзя применить хорошо отработанные методы интегрирования типа, например, Рунге-Кутта. Исходя из изложенного, перепишем его непосредственно в приращениях для к-того шага.
Δ(Ф1 + Ф2)k = [Um • sin(ωt+ψ) – ik•(2•r + roc)•Δt] / w. (2)
Выражение (2) позволяет на к-том шаге определить суммарное приращение магнитных потоков.
Далее возможно определение суммы рабочих потоков, являющейся исходной информацией для к+1-го шага:
(Ф1 + Ф2)k+1 =(Ф1 + Ф2)к + Δ(Ф1 + Ф2)k . (3)
Выражения (2, 3) не разделяют ни рабочих магнитных потоков дросселя, ни их приращений. Для получения значений потоков стержней на к+1-ом шаге необходимо совместное решение уравнений (2, 3) и нелинейной системы (1). Подобная задача, как правило, решается или при помощи специально разработанного решающего блока или нелинейного блока, подобранного из библиотеки программных средств и «подогнанного» к условиям нашей задачи.
Таким образом, полученные соотношения являются математической моделью рассматриваемой цепи. Они связывают в одну систему три ее магнитных потока ток рабочих обмоток. Упрощенный алгоритм решения задачи приведен на рис. 2. Основная идея алгоритма состоит в том, что на заключительной стадии к-того шага интегрирования при помощи зависимости (2) определяется суммарное приращение двух рабочих потоков (Ф1 + Ф2)k. Затем при помощи зависимости (3) определяется сумма потоков (Ф1 + Ф2)k+1 , но уже для к+1-го шага. Эти данные становятся исходными для последующего определения всех переменных состояния системы для к+1-го шага путем решения системы (1).
1. Система нелинейных уравнений (1) «по умолчанию» не учитывает потоки рассеяния стержней (такое допущение оправдывается тем, что потоки рассеяния, по меньшей мере, не ухудшают гармонический состав тока рабочих обмоток дросселя).
2. Не учитывается «обратное» влияние рабочих обмоток на ток обмотки управления (иначе – обмотка управления питается от источника тока).
3. Ввиду большого объема вычислительных действий, связанных с решением нелинейной системы, и накоплением ошибок интегрирования, один цикл исследования ограничивается периодом установившегося режима.
4. Для обеспечения режима, близкого к установившемуся, выбор условий для начального (нулевого) шага осуществляется таким образом, чтобы обеспечивалась периодическая повторяемость значений для всех переменных. Наиболее рационально решить эту часть задачи, добившись для момента коммутации перехода тока через нуль. Тогда основной варьируемой величиной становится начальная фаза питающего напряжения, близкая к 900 .
5. Для оценки достоверности результатов через полупериод сопоставляются экстремумы тока и рабочих потоков дросселя, а также контролируется повторяемость этих величин через период.
Первый этап исследования выполнялся для следующих исходных данных:
- Сечение магнитопровода – 20 см2 .
- Длина участков магнитопровода – 15см, 5см, 15 см.
- Расчетные (эквивалентные) воздушные зазоры стержней – 0.05 мм.
- Число витков рабочих обмоток – 250.
- Амплитуда питающего напряжения – 250 В.
При исследовании фиксировались мгновенные значения потоков стержней и тока рабочих обмоток дросселя в пределах одного периода установившегося режима. Кроме того, на основании массива данных для одного периода определялись действующее значение тока, его гармонический состав и эквивалентная индуктивность дросселя.
На рис. 2 показан вывод мгновенных значений исследуемых величин в пределах одного периода для условия F0 = 30 А. За счет постоянного подмагничивания рабочие потоки первого и второго стерж-ней несинусоидальны, однако сохраняют симметрию друг относительно друга таким образом, что ток рабочих обмоток весьма близок к синусоидальному даже при значительной величине постоянного подмагничивания.
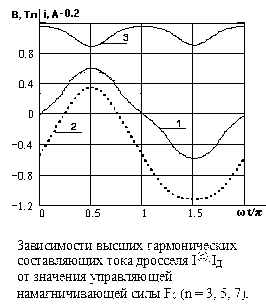
Результаты моделирования на первом этапе представлены в виде волновых диаграмм магнитных индукций трех стержней и тока рабочих обмоток (Рис.3) в пределах одного периода (масштаб тока увеличен в 2 раза) для максимального значения МДС подмагничивающего стержня.
Основные результаты исследования заключаются в следующем:
- Во всех восьми экспериментах достигнута периодическая повторяемость исследуемых величин (это значит, что начальные условия подобраны верно и в пределах периода достигнут установившийся режим).
- отклонение экстремумов тока в пределах периода не превышает 2.9 % (этот критерий показывает не только достижение установившегося режима, но и характеризует точность моделирования).
- Вне зависимости от степени насыщения одного из стержней ток управляемой индуктивности является практически синусоидальным (при наибольшем искажении тока его первая гармоника по отношению к действующему значению составляет 99 % , третья – 13 %, а пятая менее 2 %).
- Для указанных параметров индуктивность дросселя изменяется в пределах 3.8…2.0 Гн, т.е. почти в два раза.
При моделировании достигнута повторяемость значений всех исследуемых величин (токов, магнитных потоков) через период, что вне сомнений повышает достоверность результатов и дает возможность выполнить гармонический анализ тока.
Количественной характеристикой степени несинусоидальности тока на практике считают коэффициент искажения, являющийся отношением действующего значения первой гармонической составляющей к действующему значению тока.
Анализ показал, что при изменении намагничивающей силы среднего стержня в пределах F0 = 0…35 А:
- относительное значение первой гармоники тока (а следовательно и коэффициента искажения) меняется в пределах 1…0.99;
- относительное значение третьей гармоники тока меняется в пределах 0.03…0.13 ;
- более высокие гармонические составляющие практически не про-являются;
- достигнутый диапазон изменения эквивалентной индуктивности дросселя в процессе регулирования составил 2 : 1 .
В качестве критерия достоверности результатов сопоставлялись модули экстремальных значений тока через половину периода. Теоретически расхождение между ними в установившемся режиме равно нулю, а в данном исследовании обусловлено накапливающейся ошибкой интегрирования и некорректностью принятых на первом шаге начальных условий. Максимальное расхождение экстремумов тока не превысило 2.9 %, что можно считать приемлемым.
Выводы
1. Вне зависимости от степени насыщения рабочих стержней ток управляемой индуктивности является практически синусои-дальным. Расчетное значение действующего значения первой гармоники по отношению к действующему значению тока (коэффициент искажения) составляет 99 %.
2. Диапазон изменения индуктивности управляемого дросселя определяется отношением 2:1, что позволяет компенсировать емкостную составляющую токов утечки при двукратном изменении длины кабельной сети.
Литература
1. Справочник энергетика угольной шахты: В 2т. / В.С. Дзюбан и др. – Донецк: ООО «Юго-Восток, Лтд» 2001. Т 1.: – 447 с.
2. Цапенко Е. Ф. Резонансные перенапряжения в шахтных сетях при компенсации токов утечки на землю. Промышленная энергетика. 1998, № 10.