


Тема випускної роботи: Аналіз статичної стійкості електричної системи, у якій генератори оснащені АРЗ сильної дії
Науковий керівник: Ларін Аркадій Михайлович
Обєктом розробок і досліджень є найпростіша електрична система. Потрібно дослідити вплив автоматичного регулятора збудження сильної дії на сталість системи.
Мета роботи – розробка програмного забезпечення по результатам досліджень впливу коефіцієнта підсилення, постійної часу та кута на сталість системи.
Розробки виконувалися з використанням знань отриманих з курсу «Перехідні електромеханічні процеси в електричних системах». Згідно з вихідними даними було складено порядок розрахунку, описана його реалізація, враховуючи особливості завдання. За допомогою програмного пакету MathCAD розрахунки були реалізовані. А також були створені методичні вказівки до програмного продукту.
За допомогою цієї дипломної роботи можна продемонструвати ефективність використання АРЗ сильної дії, а також переконатися, що використання ПЕОМ та програмного пакету MathCAD, дозволяє зменшити витрати часу на розрахунки та підвищити їхню точність.
Автоматичне регулювання збудження в теперішній час, як правило, застосовується на всіх електростанціях (генераторах), приєднаних до електричних систем. Перерахуємо основні задачі (що відносяться до статичних властивостей системи і що розглядаються за допомогою методу малих коливань), вирішувані за допомогою регулювання збудження:
– підвищення межі передавальної потужності за рахунок управління величиною ЕРС генератора і усунення чинників, здатних викликати саморозгойдування системи поблизу межі стійкості;
– поліпшення якості режиму системи за рахунок підтримки напруги на початку передачі і забезпечення можливо більш швидкого загасання малих коливань, які виникають в нормальному режимі і несприятливо відображаються на якості роботи системи;
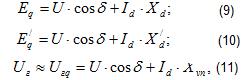
– поліпшення параметрів системи, зокрема, зміна власної частоти коливань і усунення можливості резонансу коливань.
Щоб регулятори збудження могли задовільно вирішувати перераховані вище задачі, необхідно певним чином підібрати параметри всієї системи збудження, включаючи і параметри самих регуляторів. Рішення кожної задачі накладає на вибір параметрів системи регулювання свої вимоги, що змінюються при зміні схеми і параметрів регульованої системи, а також і при зміні її режиму.
Задача аналіза – перевірка стійкості системи і визначення якості перехідного процесу при заданих параметрах регулятора і системи;
Задача сінтеза – коли, виходячи з певних вимог до стійкості і якості перехідного процесу регульованої системи визначається вид регулятора (структурна схема системи регулювання) і його параметри.
В роботі розглядається система, що складається із станції, яка працює через передачу (можливо, з проміжними навантаженнями) на шини незмінної напруги і частоти.
При аналізі регульованої системи, рівно як і при синтезі, треба математично описати процеси що в ній відбуваються, з тим щоб з розвязання відповідних диференційних рівнянь знайти всі необхідні коефіцієнти, що характеризують стійку роботу системи при заданому  або щоб при заданих параметрах перевірити, чи буде система стійка.
або щоб при заданих параметрах перевірити, чи буде система стійка.
Складання такого рівняння і аналіз його властивостей для системи регулювання збудження сильної дії буде основною метою і задачею дипломної роботи.
Для досягнення мети роботи були поставлені і вирішені наступні задачі:
– розробка програмного забезпечення для вивчення теоретичних положень аналізу статичної стійкості електричних систем з АРЗ сильної дії;
– розробка програмного забезпечення для виконання розрахунків щодо визначення умов статичної стійкості методом малих коливань;
– дослідження електричної системи з АРЗ сильної дії;
– розробка методичних рекомендацій для створення лабораторної роботи по вивченню умов статичної стійкості простішої електричної системи з АРЗ сильної дії.
Оснащення електричних систем швидкодіючими регуляторами збудження, змушує застосовувати цей метод і для дослідження стійкості електричних систем.
При цьому елементи електричної системи - генератори з їхніми системами збудження, лінії електропередачі й навантаження - розглядаються як єдиний об'єкт, стійкість якого в цілому повинна бути забезпечена. У результаті дослідження виявляються вимоги й до автоматичного регулятора й до самої системи збудження, а в окремих випадках може бути поставлено питання й про зміну параметрів основного устаткування: генераторів і синхронних компенсаторів.
Метод малих коливань заснований на дослідженні рівнянь перехідного процесу в розглянутій системі, причому використаються не самі рівняння, а їхнє лінійне наближення.
Можливість дослідження статичної стійкості по лінеаризованим рівнянням показана А. М. Ляпуновим, який довів, що система стійка в малому , якщо стійко її лінійне наближення.
Щоб лінеаризувати нелінійні диференційні рівняння перехідного процесу, потрібно:
– допустити, що відхилення координат (незалежних змінних) малі;
– всі нелінійні функції, що входять у рівняння, розкласти в ряди Тейлора у околицях заданих значень координат (вихідного режиму):

– у розкладаннях залишити лише члени, що містять відхилення в перших ступенях (лінійні члени);
– з отриманих рівнянь виключити рівняння рівноваги.
Судити про стійкість системи можна за знаком дійсної частини коренів характеристичного рівняння, яким є головний визначник отриманої системи рівнянь. Система стійка, якщо всі дійсні корені і дійсні частини комплексних коренів відємні, тобто всі корені розташовані ліворуч від мнимої вісі комплексної площини. Однак визначити корні характеристичного рівняння досить важко, тому що порядок характеристичного рівняння звичайно високий, - п'ятий і вище. Для цього використовують методи, що дозволяють, не визначаючи коренів характеристичного рівняння, судити про їхнє розташування на комплексній площині. Це критерії Гурвиця, Рауса, Михайлова, метод виділення областей стійкості в площині одного або двох параметрів (D-розбиття) і т.д.
Схема найпростішої електричної системи, стосовно до якої буде вивчатися статична стійкість, показанна на рис.1. Система має автоматичне регулювання збудження, що складається із трьох елементів.
Регулятор виконаний за допомогою електричних елементів (окремі елементи обведені пунктиром).
 – на виході регулятора пропорційно відхиленню напруги
– на виході регулятора пропорційно відхиленню напруги , що вимірюється на вимірювальному елементі. Вимірювальний елемент має місткову схему з нелінійним елементом у лівому верхньому плечі.
, що вимірюється на вимірювальному елементі. Вимірювальний елемент має місткову схему з нелінійним елементом у лівому верхньому плечі.
Нелінійність підібрана так, що при
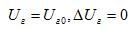
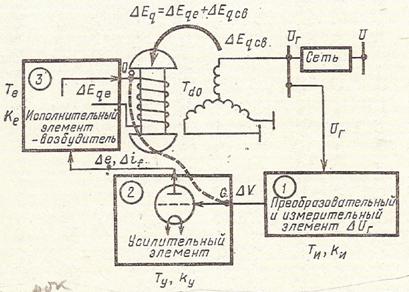
Рисунок 1 - Схема найпростішої електричної системи, що має регулятор збудженя сильної дії, представлений трьома елементами (1, 2, 3 ):
- - - зворотний зв'язок, у результаті дії якої  .
.
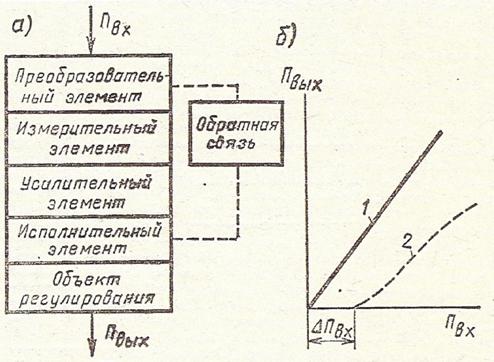
Рисунок 2 – Функціональна схема регулятора і його дія: а – структура регулятора; б – зміна вихідного параметра при сильному регулюванні без зони нечутливості (1) і із зоною нечутливості
при сильному регулюванні без зони нечутливості (1) і із зоною нечутливості (2).
(2).
Рисунок 3. Структурна схема регульованої системи, показаної на рис.1
Рисунок 4 – Кутова характеристика генератора з АРЗ сильної дії (у даній анімації використано 10 кадрів, кількість циклів - 10, розмір - 17 КБ)
Вихідні диференційні рівняння
При дослідженні стійкості електричних систем звичайно розглядаються електромеханічні й електромагнітні перехідні процеси в електричній системі. До них у першу чергу відносяться перехідні процеси, пов'язані з відносним переміщенням роторів синхронних машин – електромеханічні процеси й перехідні процеси в обмотці збудження генератора й самому збуднику – електромагнітні процеси. Ці перехідні процеси в першому наближенні описуються наступними диференційними рівняннями:
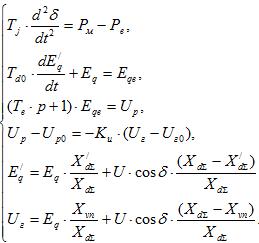
Рівняння відносного руху ротора генератора
 (1)
(1)
де- постійна інерції генератора (рад.);
- кут між поздовжньою віссю ротора генератора й вектором, який обертається з синхроною швидкістю прийнятим за вісь відліку (рад.);
- механічна потужність турбіни (у відносних одиницях); t - час (рад.);
- електрична потужність генератра (у відносних одиницях);
Зазначимо, що при рішенні практичних завдань зручні інші форми запису цього рівняння, а саме:
 (2)
(2)
де – постійна інерції час виражені в сек, а кут – в градусах, і
 (3)
(3)
де – постійна інерції й час виражені в сек, а кут – у рад. Ці рівняння можуть бути отримані з рівняння (1) шляхом відповідних підстановок.
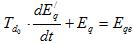
Рівняння перехідного процесу в обмотці збудження генератора
 (4)
(4)
де  – постійна часу обмотки збудження генератора при розімкненій обмотці статора (рад.або сек);
– постійна часу обмотки збудження генератора при розімкненій обмотці статора (рад.або сек);
 – поздовжні ЕРС відповідно за перехідними й синхронним реактивними опорами;
– поздовжні ЕРС відповідно за перехідними й синхронним реактивними опорами;
 – ЕРС сталого режиму, яке дорівнює у відносних одиницях напрузі збудника;
– ЕРС сталого режиму, яке дорівнює у відносних одиницях напрузі збудника;
t – час (рад. або сек);
Рівняння перехідного процесу в збуднику
 (5)
(5)
де  – постійна часу обмотки збудження збудника (рад. або сек);
– постійна часу обмотки збудження збудника (рад. або сек);
 – стале значення напруги збудника, яке дорівнює у відносних одиницях напрузі на виході регулятора.
– стале значення напруги збудника, яке дорівнює у відносних одиницях напрузі на виході регулятора.
Це рівняння може бути отримано нижче наведеним шляхом.
Для збудника (див. рис. 1) зв'язок між  у його обмотці збудження (без урахування насичення) може бути представлена в наступному вигляді:
у його обмотці збудження (без урахування насичення) може бути представлена в наступному вигляді:
 (6)
(6)
Для обмотки збудження збудника можна записати
або в операторній формі
 (7)
(7)
Відкидаючи із (1.6) і (1.7) струм збудження й позначаючи
 ,
,
Отримаємо

Приймаючирівним напрузі ва виході регулятора збудження й переходячи до системи відносних одиниць, отримаємо

що у звичайній формі і відповідає рівнянню (5).
Рівняння ідеального автоматичного регулятора напруги сильної дії, що миттєво змінює напругу на ОВВ, пропорційно відхиленню напруги на затискачах генератора:
 (8)
(8)
де  – коефіцієнт підсилення (регулювання) регулятора.
– коефіцієнт підсилення (регулювання) регулятора.
Система наведених рівнянь містить шість змінних: 
Додаткові рівняння, що зв'язують їх між собою, можуть бути отримані з векторної діаграми генератора рис.4:
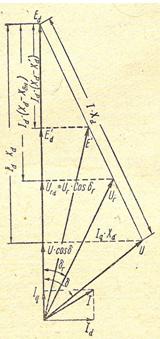
Рисунок 4 – Векторна діаграма синхронної машини з неявно вираженими полюсами.
де

Визначивши з (9) струм  і підставивши його в рівняння (10) і (11), запишемо відсутні рівняння
і підставивши його в рівняння (10) і (11), запишемо відсутні рівняння
 (12)
(12)
 (13)
(13)
Таким чином, для дослідження системи, що містить генератор з АРЗ сильної дії потрібно мати систему з шести рівнянь. З урахуванням виконаного аналізу ця система вихідних диференційних рівнянь може бути записанна в наступному виді якщо не враховувати вплив демпфування:
Запишемо шість рівнянь:
 (14)
(14)
Для генератора з автоматичним регулятором збудження, що реагує на відхилення напруги, при роботі через лінію електропередачі на шини постійної напруги, можуть бути записані наступні рівняння перехідного процесу:
рівняння відносного руху ротора генератора:
 (15)
(15)
рівняння перехідного процесу в роторі генератора:
 (16)
(16)
рівняння перехідного процесу в збуднику:
 (17)
(17)
рівняння регулятора:
 (18)
(18)
де  – коефіцієнт підсилення регулятора.
– коефіцієнт підсилення регулятора.
Знак мінус перед поставлений тому, що зростання  повинне супроводжуватися зменшенням , а зниження
повинне супроводжуватися зменшенням , а зниження – збільшенням.
– збільшенням.
Для дослідження отриманої системи рівнянь її необохідно доповнити ще двома, тому що рівнянь усього 4, а змінних 6: .
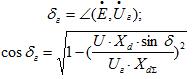
Відсутні рівняння можуть бути отримані з векторної діаграми генератора (див. рис. 4):
Останнє рівняння можна спростити, прийнявши
При цьому

Серед наведених вище диференційних рівнянь перехідного процесу, розглянутих при аналізі стійкості електричної системи, рівняння руху ротора генератора нелінійно, тому що вираз електричної потужності є синусоїдальною функцією кута. Це обставина, за винятком окремих випадків не дозволяє знайти рішення, що описує перехідний процес у системі, у загальному виді.
Тому для визначення умов статичної стійкості, тобто стійкості при малих зміненнях параметрів режиму, дослідження проводяться на підставі лінеаризованих рівнянь, одержаних шляхом лінеаризації вихідних нелінійних диференційних рівнянь.
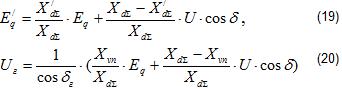
Лінеаризовані рівняння
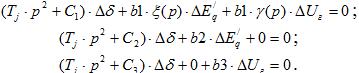
Відповідно рівнянням (15) - (21) лінеаризовані рівняння, записані для малих збурень у диференційній формі, мають такий вигляд:
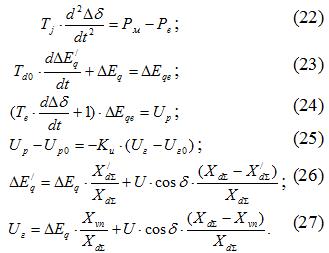
Після здійснення заміни  , одержимо відповідну систему лінійних рівнянь записаних в операторном виді.
, одержимо відповідну систему лінійних рівнянь записаних в операторном виді.
де
Розглянемо процеси, що відбуваються при регулюванні найпростішим автоматичним регулятором збудження сильної дії. Виходячи з структурної (рис.3) схеми регулятора, запишемо основні співвідношення, що характеризують його роботу.
 (34)
(34)
Перша складова  , обумовлена процесами, що відбуваються безпосередньо в генераторі, відображає вплив реакції якоря.
, обумовлена процесами, що відбуваються безпосередньо в генераторі, відображає вплив реакції якоря.
Друга складова

або
 (35)
(35)
відображає зміни струму збудження. Ця зміна обумовлена зміною ЕРС, прикладеної до обмотки збудження збудника і у свою чергу залежної від дії регулятора збудження (рис. 1). Вочевидь, що
обумовлена зміною ЕРС, прикладеної до обмотки збудження збудника і у свою чергу залежної від дії регулятора збудження (рис. 1). Вочевидь, що

звідки
 (36)
(36)
Підставляючи (36) в (35), отримаємо
 (37)
(37)
де – еквівалентна постійна часу збудника, визначена з урахуванням зворотнього зв'язку;
 – коефіцієнт посилення;
– коефіцієнт посилення;
Далі, враховуючи, що підсилювач є інерційним елементом з постійною часу і коефіцієнтом посилення запишемо
і коефіцієнтом посилення запишемо
 (38)
(38)
Розглядаючи преобразовальний і вимірювальний елементи приблизно як одину ланку з постійною часу  і коефіцієнтом посилення
і коефіцієнтом посилення  знайдемо
знайдемо
 (39)
(39)
Підставляючи (39) в (38) і потім в (37), отримаємо
 (40)
(40)
де  – коефіцієнт посилення системи.
– коефіцієнт посилення системи.
У сталому режимі  , де
, де .Звідсіля, з урахуванням (35), можна визначити коефіцієнт посилення
.Звідсіля, з урахуванням (35), можна визначити коефіцієнт посилення
тут
отже,

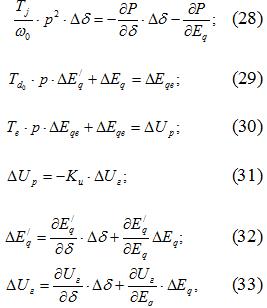
Характеристичне рівняння
Запишемо рівняння руху системи в більш компактній формі:

У цих рівняннях маємо п'ять невідомих  .Виразимо приріст потужності
.Виразимо приріст потужності  через прирости е.р. с.
через прирости е.р. с.  ,і приріст напруги
,і приріст напруги  отримаємо таким чином, ще три рівняння.
отримаємо таким чином, ще три рівняння.
Прирости потужності мають вигляд
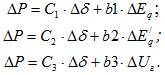
Значення  будуть наступні:
будуть наступні:
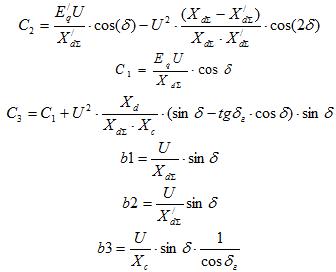
де
Після нескладних перетворень матимемо три рівняння:
Визначник системи цих трьох рівнянь – це і є характеристичний детермінант.

Для того щоб одержати характеристичне рівняння, можна зробити наступне: значення  з (31) підставити в (30); значення
з (31) підставити в (30); значення  з отриманого рівняння, а також з (32) і з (33) підставити в (29); скласти з (28) і рівняння, що вийшло, визначник і розкрити його.
з отриманого рівняння, а також з (32) і з (33) підставити в (29); скласти з (28) і рівняння, що вийшло, визначник і розкрити його.
Отримане харатеристичне рівняння четвертого порядку
 (42)
(42)
запишемо в наступному виді:

де
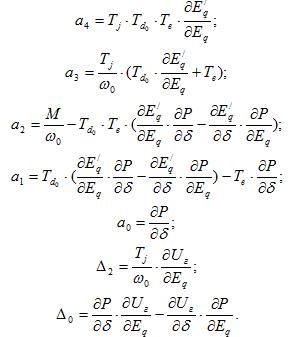
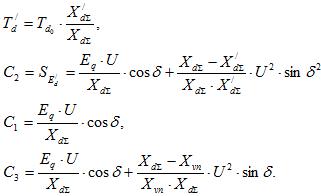
Підставляючи в  значення часток похідних і вводячи нові позначення, oдержимо
значення часток похідних і вводячи нові позначення, oдержимо
 (44)
(44)
де
Права частина характеристичного рівняння (43) визначає стійкість нерегульованої системи ( – коефіцієнти характеристичного рівняння, що не залежать від регулювання порушення), а друга його частина є математичним відображенням впливу автоматичного регулювання порушення (
– коефіцієнти характеристичного рівняння, що не залежать від регулювання порушення), а друга його частина є математичним відображенням впливу автоматичного регулювання порушення ( одиничні добавки до відповідних коефіцієнтів характеристичного рівняння, пропорційні коефіцієнту підсилення регулятора).
одиничні добавки до відповідних коефіцієнтів характеристичного рівняння, пропорційні коефіцієнту підсилення регулятора).
1. Регулювання сильної дії (без зони нечутливості) розширює область стійкої роботи і дозволяє працювати при кутах, більших 90°. Граничний кут виявляється тим більше, чим менше постійна часу збудника. При  граничний кут стійкої роботи визначається умовою
граничний кут стійкої роботи визначається умовою  .
.
2. Чим менше постійна часу збудника, тим менше виявляється максимальний можливий коефіцієнт посилення (рис. 4). Це означає, що вибираючи такі великі коефіцієнти посилення, при яких напруга генератора підтримується незмінною, не можна забезпечити його роботу з великими граничними кутами. Якщо відмовитися від жорсткої підтримки напруги, допускаючи її зниження із зростанням навантаження, то стійка робота може бути забезпечена при кутах порядку 90° і навіть дещо більш (рис. 5,б).
В найпростішому регуляторі сильної дії може забезпечуватися робота при добрій підтримці напруги, але тоді стійкість порушується при кутах, менших 90°. Забезпечити роботу при кутах 90° або декількох більших можна при гіршій підтримці напруги. Гранична передавана потужність виявляється при цьому близька до , тобто до максимуму потужності, визначеного при постійності
, тобто до максимуму потужності, визначеного при постійності  . В спрощених розрахунках генератори, забезпечені регуляторами збудження сильної дії, вводяться в схему заміщення реактивним опором
. В спрощених розрахунках генератори, забезпечені регуляторами збудження сильної дії, вводяться в схему заміщення реактивним опором і прикладеної за ним е. р. с.
і прикладеної за ним е. р. с.  .Генератори з регуляторами сильної дії, в першому наближенні вводяться в схему заміщення реактивним опором і е. р. с.
.Генератори з регуляторами сильної дії, в першому наближенні вводяться в схему заміщення реактивним опором і е. р. с.
1. Переходные процессы в системах электроснабжения: Учебник / В. Н. Винославский, Г.Г. Пивняк, Л.И. Несен и др.; Под ред. В. Н. Винославского. – К.: Выща шк. Головное изд-во, 1989. – 422 с.: ил.
2. Методические указания к лабораторным работам по электромеханическим переходным процессам в электрических системах (для студентов специальностей 1001, 1002, 1004.01) / Сост.: Г. Г. Рогозин, А. М. Ларин, Н. Г. Пятлина. – Донецк: ДПИ, 1990. – 48 с.
3. Переходные электромеханические процессы в электрических системах: Учеб. для электроэнергет. спец. вузов. – 2-е изд., перераб. и доп. В. А. Венников / М.: Высш. шк., 1970. – 472 с., ил.
4. Статическая устойчивость электрических систем с синхронными машинами, снабженными автоматическими регуляторами возбуждения.:Лекции / М. Н. Розанов – М. 1959.
5. Переходные электромеханические процессы в электрических системах: Учеб. для электроэнергет. спец. вузов. – 4-е изд., перераб. и доп. / В. А. Венников / М.: Высш. шк., 1985. – 536 с., ил.
6. Жданов П. С. Статическая устойчивость сложных электрических систем. – М.: 1940,
7. Ульянов С. А. Электромагнитные переходные процессы. – М.: Энергия, 1970, 518с.
8. Кафедра ЭСИС- разработка автоматизированной системы управления электрическими системами http://etf.donntu.ru
9. Методы расчетов предельных по статической устойчивости режимов энергосистем http://referats.allbest.ru/programming/103021.html
10. РД 34.20.577 Методические указания по определению устойчивости энергосистем. Литкенс И.В., Васин В.П. Работа электрических систем с АРВ сильного действия вблизи границы области устойчивости. "Электричество", 1968, № 7. 57. Автоматические регуляторы возбуждения. Под ред. Г.Р.Герценберга. http://docyment.ru/doc/5933.htm