Реферат по теме магистеркой работе: "Оптимизация движения подъемного сосуда на этапах разгона и замедления"
ВВЕДЕНИЕ
• Актуальность
• Цели и задачи
• Научная новизна и практическая ценность
• Практическая и методологическая значимость результатов работы
• Апробация работы.
ОБЗОР ИССЛЕДОВАНИЙ ПО ТЕМЕ
• Обзор исследований по теме в ДонНТУ
• Обзор исследований по теме в Украине
• Обзор исследований по теме в мире
ОСНОВНАЯ ЧАСТЬ
Вступление
- Кинематические схемы шахтных подъемных установок. Расчетные схемы
- Анализ диаграмм ускорений, рывка и усилий в ШПУ
ЗАКЛЮЧИТЕЛЬНАЯ ЧАСТЬ
СПИСОК ЛИТЕРАТУРЫ
ВВЕДЕНИЕ:
На шахтах и рудниках подъём является одним из основных звеньев технологического комплекса, от которого в значительной степени зависит работоспособность и производительность всего предприятия. Эта роль подъёма и определяет те высокие требования, которые предъявляются как к установке в целом, так и к её отдельным элементам, в том числе и к системам управления.
Введение надёжной и современной системы управления электроприводом шахтной подъёмной установки позволяет улучшить эксплуатационные характеристики и качество работы подъемной установки в целом. В соответствии с этим разработка и внедрение данных систем является основополагающей задачей.
Целью создания современной системы автоматизированного управления является модернизация управления процессами пуска и торможения клетевой подъёмной машины, а также контроля параметров и диагностики состояния оборудования подъёмной установки с помощью современных микропроцессорных средств и средств вычислительной техники. [8]
Актуальность работы:
В связи с отработкой наиболее доступных месторождений полезных ископаемых шахты и рудники вынуждены переходить на все более глубокие горизонты. При этом для сохранения производительности подъемные установки должны иметь все большую скорость движения подъемных сосудов и большую их грузоподъемность.
Данная работа выполняется во взаимодействии с научной тематикой кафедры, с учётом опыта работы научно-производительной фирмы «Мидиэл» и научными тенденциями в плане применения современных систем ЕП зарубежными фирмами. Особенно широкий спектр продукции предлагается такими фирмами, как Elvovert (Австрия), SIEMENS (Германия), Schneider électrique (Франция), ABB (Швеция, Финляндия), Danfoss (Дания).
Объектом изучения есть шахтная угольная подъемная установка.
Предмет разработки – системы: тиристорный преобразователь - двигатель, преобразователь частоты – асинхронный двигатель (ПЧ-АД) и ПЧ-СД, также оптимальные тахограммы движения установки.
Основные цели этого проекта:
• ознакомление с технологическим процессом работы подъёмной установки;
• исследование возможных вариантов совершенствования систем электроприводов ШПУ;
• моделирование типовых режимов работы ШПУ.
Задачи исследований.
Указанные цели реализуется решением следующих задач:
1. Рассмотрение технологического процесса подъёмных установок в целом;
2. Сравнительный анализ возможных систем управления шахтными подъёмными установками:
• постоянного тока по системе тиристорный преобразователь – двигатель;
• переменного тока по системе преобразователь частоты – асинхронный двигатель;
• переменного тока по системе преобразователь частоты – синхронный двигатель.
3. Выбор наиболее рациональной системы ЭП ШПУ;
4. Разработка математической модели шахтной подъемной установки (ШПУ), для формирования оптимальных тахограмм движения сосуда;
5. Оценка систем по динамическим показателям в переходных режимах.
Научная новизна результатов исследований состоит в:
1. разработке такого закон управления, который позволил бы поддерживать постоянство перегрузочной способности в рассматриваемом диапазоне изменения частоты вращения, с формированием законов управления;
2. разработке рациональной математической модели шахтной подъемной установки (ШПУ) для изучения динамических нагрузок.
Апробация работы.
Основные положения и результаты работы представлялись, докладывались и обсуждались на таких конференциях:
− Х Международной научно-технической конференции. «Автоматизация технологических объектов и процессов. Поиск молодых» (Донецк 2010);
− Всеукраинской студенческой научно-технической конференции. «Электротехнические и электромеханические системы» (Севастополь 2010, 20-22 апреля).
ОБЗОР ИССЛЕДОВАНИЙ ПО ТЕМЕ:
Исследованием и оптимизацией систем ШПУ занимались такие преподаватели ДонНТУ:
• д.т.н., проф. Борисенко В.Ф. [1]
Факультет: Электротехнический (ЭТФ)
Кафедра: Электромеханические системы автоматизации и электропривод
• д.т.н., проф. Чепак А.А.
Факультет: Электротехнический (ЭТФ)
Кафедра: Электромеханические системы автоматизации и электропривод
Украинскими учёными в области электропривода ШПУ решаются следующие вопросы:
- Моделирование электропривода с учетом типа электрических машин, с помощью пакетов Matlab (Simulink) и ДИСПАС, а также типа силового преобразователя. Описаны особенности моделирования асинхронных машин и расчет регуляторов в системе подчиненного векторного регулирования…. [2]
- Изложены основные сведения по электрификации и рациональному использованию электроэнергии на предприятиях, разрабатывающих россыпные месторождения. Показаны особенности электропривода горных машин и механизмов используемого электрооборудования. [3]
- Рассмотрение сложных електромеханических систем крановых механизмов подъема и горизонтального передвижения, также дается их математическое описание, результаты моделирования, приводятся структурные схемы електромеханической и механической частей ЭМС. [4]
- Рассмотрение особенностей построения асинхронных электроприводов горных машин на основе применения маловентильных тиристорных коммутаторов. Приведены результаты исследований процессов.[5]
- Приведение справочных материалов, необходимых для проектирования шахтных подъемных установок вертикального подъема. Рассмотрение примеров по выбору и расчету одноканатных и многоканатных подъемных установок. Большое внимание уделено многоканатному подъему, как наиболее эффективному виду вертикального транспорта. Дана теория расчета канатов для многоканатного подъема и определена его оптимальная скорость.[6]
- Рассмотрение типов подъемно-транспортных установок, используемых на предприятиях АПК. Приведение необходимых расчетов механизмов подъемно-транспортных машин и установок.[7]
За пределами Украины решаются следующие вопросы:
- Рассмотрение устройств и эксплуатация современных подъемных машин, электропривода и оборудования подъемных установок, изготовляемых отечественными заводами. Рассмотрение конструкции оборудования подъемных установок: шахтных клетей, скипов, посадочных устройств, загрузочных и разгрузочных устройств, подъемных канатов и копров, а также устройство и конструкции механической и электрической частей подъемных машин, контрольно-измерительной и защитной аппаратуры подъемных установок. [8]
- Рассмотрение конструкции современных подъёмно-транспортных машин, принципы их действия, области применения. Приведение основ выбора, расчёта и конструирования механизмов. Уделено внимание вопросам комплексной механизации и автоматизации производственных процессов, повышению надёжности и производительности машин, а также вопросам экономики. [9]
Обзор разработок:
Появление цифровых систем управления повысило надёжность электромеханической системы в целом, а также позволило реализовывать сложные алгоритмы управления электроприводом, при его настройке и устойчивой работе.
Классической структурой ЭП ШПУ переменного тока в последнее время стала структура на базе преобразователя частоты (ПЧ-СД, ПЧ-АД), рассмотрению которой и отдаётся предпочтение в данной работе.
На мировом рынке преобразовательной техники выделились следующие фирмы-лидеры: SIMENS, Shneider Electrique, Control Technique, ABB, Lenze которые выпускают КЭП переменного тока. Каждое новое поколение преобразователей частоты содержит всё большее число функций, как управляющих двигателем, так и улучшающих технологический процесс. В основном это функции:
— обеспечения необходимых тахограмм разгона и торможения;
— регулирование скорости в установившемся режиме;
— прецизионные задания скорости и ускорения;
— обеспечение реверса;
— автонастройки преобразователя;
— обработка сигналов обратных связей, заводимых в систему управления;
— организация контуров управления;
— защиты преобразователя от токовой перегрузки;
— реализация алгоритмов энергосбережения;
— реализация различных принципов управления (частотно-токовое, векторное, прямое управление моментом);
— визуализации сигналов;
— интеграции преобразователя в систему управления более высокого уровня (промышленную сеть);
— специальные технологические функции;
За счёт применения указанных функций, встроенных в современные системы ЭП, преобразователи фирмы Shneider Electrique нашли применение в следующих электроприводах:
— насосные агрегаты современных систем отопления (Altivar 21);
— системы вентиляции зданий и сооружений (Altivar 21);
— подъёмно-транспортное оборудование (Altivar 71);
— лифты (Altivar 71);
— фасовочно-упаковочное оборудование (Altivar 71);
— текстильные машины (Altivar 71);
Преобразователи фирмы Control Technique:
— металлургическая промышленность (Unidrive SP);
— крановые механизмы (Unidrive SP);
— лифты (Unidrive SP);
— насосы и вентиляторы (Commander SK);
— конвейеры (Commander SK);
— мешалки (Commander SK);
Таким образом, современная преобразовательная приводная техника, делает огромные шаги в своём развитии, постоянно совершенствуясь и тем самым повышая качество технологических процессов. Особенно важным при этом становится выработка новых подходов к её разработке и проектированию, с привлечением мощнейших вычислительных средств. Для постоянного совершенствования, необходимы научные исследования и обоснованные принятия решений, устраняющих возникающие проблемы.
ОСНОВНАЯ ЧАСТЬ:
Введение:
Автоматизированный электропривод шахтных подъемных машин (ШПМ) - одно из бурно развивающихся направлений привода современных производственных машин, ме¬ханизмов и установок.
Специфика работы, условия, в которых осуществляются транспортные операции по перемещению грузов, людей, механизмов, запасного и ремонтного оборудования, наличие большого числа ШПМ, работающих в разных климатических зонах и осуществляющих подъем (опускание) как с глубины нескольких сот метров, так и с глубин около двух ки¬лометров способствовали выделению электропривода ШПМ в отдельное направление, ко¬торое до настоящего времени прошло несколько этапов развития.
К первому этапу можно, условно, отнести широкое применение асинхронного двигателя с фазным ротором и систем с электромашинными преобразователями.
Переход к системам управляемый преобразователь (статический) - двигатель (на постоянном или переменном токе) знаменует второй этап. Можно констатировать, что этот этап продолжается и в настоящее время, но на новой элементной базе и с использо¬ванием современной теории управления.
1. Кинематические схемы шахтных подъемных установок. Расчетные схемы [1]
В настоящее время на шахтах и рудниках эксплуатируется большое число подъем¬ных установок, кинематические схемы которых могут быть представлены в следующем виде (рис.1)
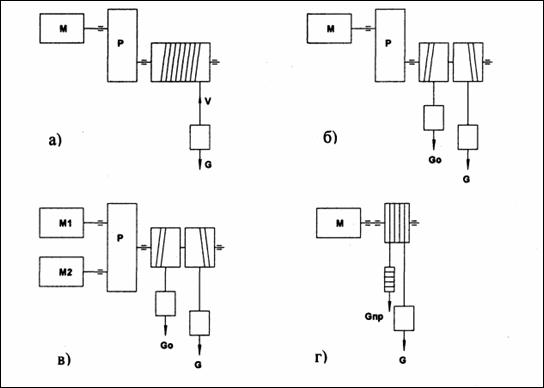
Рисунок 1 - Кинематические схемы подъемных установок
(на схемах не показана возможная система с уравновешивающим канатом):а) однодвигательный одноклетевой; б) однодвигательный двухскиповой; в) двухдвигательный двухскиповой; г) однодвигательный со шкивом трения и противовесом.
Для перехода к расчетной схеме необходимо сделать ряд допущений:
- моменты инерции отдельных частей машины считаются сосредоточенными в определенных условных точках;
- упругие звенья невесомы и характеризуются постоянной жесткостью;
- деформация упругих звеньев подчиняется закону Гука;
- волновыми процессами в упругих элементах пренебрегаем.
При исследовании поведения электромеханической системы (ЭМС) моменты инер¬ции отдельных звеньев приводятся, обычно, к частоте вращения приводного двигателя (или другого заданного звена).
Для случая вращательного движения формулы приведения:
 ,
,
в случае поступательного движения:
 ,
,
при двух видах движения:
 .
.
Момент сопротивления к частоте вращения приводится с помощью выражения:
 .
.
Жесткость при кручении:
 (Нм/рад),
(Нм/рад),
жесткость при растяжении (сжатии):
 (H/м ),
(H/м ),
приведенная жесткость:
 ,
,
 .
.
Эквивалентная жесткость при последовательном соединении элементов
 ,
,
при параллельном соединении
 .
.
После приведения моментов инерции и жесткостей элементов кинематические схемы рис.2 будут иметь вид:
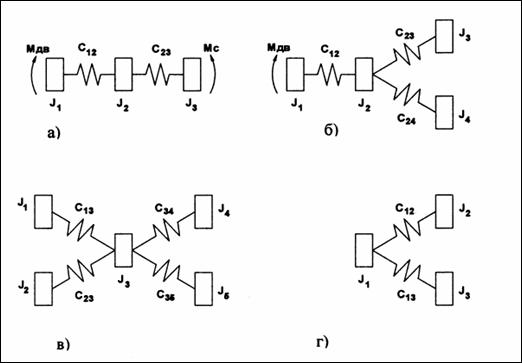
Рисунок 2 - Расчетные схемы типовых ШПМ
На рис. 3 приведена типовая неразветвленная трехмассовая расчетная схема. С уче¬том всех действующих сил в системе рис. 2 трансформируется:
Рисунок 3 - Расчетная трехмассовая схема,[1].
2. Анализ диаграмм ускорений, рывка и усилий в ШПУ
Работа подъемной установки характеризуется цикличностью, т. е. рядом сменяющихся циклов, следующих друг за другом. В свою очередь каждый цикл можно разбить на четыре основ¬ных периода: разгон, равномерное движение, замедление до пол¬ной остановки и пауза.
Таким образом, чтобы обеспечить требуемую производитель¬ность любого подъема, каждый цикл должен укладываться в определенное, наперед заданное время. Для этого необходимо выдерживать расчетные значения ускорения и замедления, мак¬симальной скорости и продолжительности паузы, т. е. выдержи¬вать принятую диаграмму скорости. Диаграмма скорости подъ¬ема - это зависимость скорости движения подъемных сосудов от времени.
Подъемные установки в зависимости от назначение и высоты подъема, вида и грузоподъемности сосудов, числа обслуживаемых горизонтов, расстояния между ними могут работать по одной из следующих диаграмм движения (рис.4): а) трехпериодная, б) пятипериодная, в) шестипериодная, г) семипериодная.
Рисунок 4 – Типовые тахограммы ШПМ
Диаграмма типа рис. 4 (а) является наиболее простой и находит применение для клетевых подъемных установок с одноэтажными не опрокидными клетями при качающихся приемных площадках. В частном случае t1 может быть равным t3 (времена разгона и торможения), обычно время t3 замедления (торможения) несколько меньше t1 .
Наиболее сложные шести- и семипериодные диаграммы скорости необходимы при грузовом подъёме с опрокидными скипами или клетями. Это объясняется необходимостью ограничения скорости движения подъёмных сосудов разгрузочных кривых. Поэтому период разбивается на два участка с различными ускорениями. То же относится и к периоду замедления.
Рисунок 5 – Диаграммы усилий уравновешенной двухконцевой (а), неуравновешенной с опрокидными скипами (б) и одноклетевой (в) подъемной установки.
На рис. 5 а, б приведены диаграммы движущих усилий на ободе барабана (шкива трения) уравновешенной двухконцевой подъёмной установкой с неопрокидными скипами при нормальной работе по выдаче груза и для статически неуравновешенной подъёмной установки, оборудованной опрокидными клетями или скипами. Из диаграмм усилий следует, что установки с неопрокидными клетями или скипами имеют в период пуска меньше усилия на валу двигателя по сравнению с опрокидными. Это объясняется тем, что при опрокидывании подъёмного сосуда часть его веса приходится на разгрузочные кривые и этим создаётся ещё большая неуравновешенность системы, нарастающая в конце дотягивания при разгрузке сосуда. Поэтому в момент опрокидывания необходимо создание значительного тормозного момента на валу подъёмной машины. Там же представлены диаграммы скорости движения подъёмных сосудов U = f (t).
Диаграмма усилий клетевой подъёмной установки (рис. 5, в) существенно отличается от диаграмм усилий скипового подъёма. Объясняется это сложностью маневров при посадке клетей на посадочные кулаки или качающиеся площадки.
Максимальная скорость движения сосудов чисто грузовых подъёмных установок вертикальных шахт и рудников не должна превышать значение:

Где Vмакс - максимальная скорость движения подъёмный сосудов, м/с, Н- высота подъёма, м.
Причём эта скорость не должна превышать 20м/с. Максимальная частота вращения двигателя должна оставаться неизменной при изменении нагрузки на валу барабана подъёмной машины, т.е. механическая характеристика двигателя должна быть жёсткой.
Повышение предельных скоростей требует и увеличение ускорений. Однако повышение ускорения создаёт дополнительные динамические усилия на механическую часть подъёмной машины и канаты, отрицательное воздействие на людей, опасность проскальзывания каната по шкиву у подъёмных установок со шкивами трения.
Наиболее эффективный способ снижения динамический усилий в упругих элементах подъёмной машины и канатах, снижение физиологического воздействия на людей – плавное изменение движущегося момента, т.е. ограничение производной ускорения – рывка. [9]
На примере, рассмотрим промоделированную систему в относительных единицах, тиристорный преобразователь – двигатель (ТП-Д) с ограничением рывка (рис.9). При моделировании системы были исследованы пуск, реверс, торможение, наброс и сброс нагрузки.
Для ограничения ускорения и рывка, при управлении скорости подъемной машины можно вместо обычного задатчика интенсивности, который часто называют интегральным (И-ЗИ) применить усовершенствованный задатчик интенсивности с ограничением рывка (И2-ЗИ), структурная схема которого приведена на рисунке 6, а исходная характеристика имеет вид, показанный на рисунке 7.
Этот ЗИ состоит из пропорционального усилителя ПУ, звена ограничения ЗО, звена с идеальной релейной характеристикой РХ и двух интеграторов І1, І2. С помощью отрицательных обратных связей образовываются два контура, внутренний из которых есть обычный ЗИ. Для более точного обрабатывания системой управляющего действия И2-ЗИ может дополняться параллельными управляющими связями за первой и второй производными от исходного сигнала, которые показаны на рис. 7 пунктирами. Коэффициенты передачи этих связей избираются из условий "модульного оптимума".
Рисунок 6 – ЗИ с ограничением рывка
Рисунок 7 – Выходная характеристика И2-ЗИ
Приведенный И2-ЗИ формирует сигналы задачи на скорость Uзи=kш*W (W - скорость обращения двигателя, kw - коэффициент обратной связи за скоростью), ускорение Uзп и рывок Uзр.
На рис. 7 обозначено tзр - время роста ускорения; tсп - время спадания ускорения; tу - время изменения скорости с упроченным ускорением.
Определим постоянную времени задатчика тока:
Определим постоянную времени задатчика тока:
Tзс=tс, де tс – время ограничения рывка.
Постоянная времени ЗИ:
 , где Е0 – ускорение;
, где Е0 – ускорение; 
Задатчик интенсивности размещается в ячейке ЗИ-2АИ.
Структурная схема системы регулирования скорости шахтной подъёмной установки в относительных единицах приведена на рисунке 8, а схема И2-ЗИ на рисунке 9.
Рисунок 8 – Структурная схема для исследования динамических режимов ШПУ

Рисунок 9 – Схема подсистема И2-ЗИ (Анимация размером 24 Кб, 5 кадров, 5 циклов).
Сравним поведение системы при пуске от разных задатчиков интенсивности.
Графики переходных процессов при пуске без нагрузки приведены на рис. 10-12, а с нагрузкой на рис. 13-16. На этих графиках цифрами обозначено работа системы виз обычного ЗИ (1) и ЗИ с ограничением рывка (2).
Как видно из графиков при использовании И2-ЗИ перерегулирование за током уменьшилось до 1,13 %, максимальное значение ускорения до 0,0059, а рывка до 0,001.
Графики переходных процессов в системе управления электроприводом ШПУ при работе от И2-ЗИ с нагрузкой приведенные на рис. 13. Полученные графики свидетельствуют, что избранная система управления электроприводом ШПУ удовлетворяет всем требованиям технологического процесса и может быть рекомендована к внедрению.
Рисунок 10 – Графики переходных процессов при пуске без нагрузки
Рисунок 11 – Графики ускорения "а" при пуске без нагрузки
Рисунок 12 – Графики рывка при пуске без нагрузки
Рисунок 13 – Графики переходных процессов при пуске с нагрузкой
Рисунок 14 – Графики ускорение "а" при пуске с нагрузкой
Рисунок 15 – Графики рывка при пуске с нагрузкой
Рисунок 16 – Графики переходных процессов при работе по тахограмме.
ЗАКЛЮЧИТЕЛЬНАЯ ЧАСТЬ:
На данном этапе работы, были проведены исследования динамики ЭМС ШПУ с приводом, по системе ТП-Д были выполнены в среде MatLab (приложении Simulink) и показали возможность реализации желаемой тахограммы движения системы на этапах разгона, замедления и торможения системы.
При написании данного автореферата магистерская работа ещё не завершена. Запланированная дата окончания работы: вторая декада декабря 2010 года. Полный текст работы может быть получен у автора (Лазаревой М.В.) или руководителя (Борисенко В.Ф.) после указанной даты.
СПИСОК ЛИТЕРАТУРЫ:
1. Борисенко В.Ф. Электромеханические системы автоматизации стационарных установок. Сборник трудов ХII международной научно-технической конференции, - Донецк 2005., 283с.;
2. Алексеев В.В., Козярук А.Е., Загривный Э.А. Электрические машины. Моделирование электрических машин приводов горного оборудования;
3. Багаутинов Г.А. и др. Основы электропривода. Электрооборудование горных машин и механизмов карьеров и приисков;
4. Герасимяк Р.П. Анализ и синтез крановых электромеханических систем, - Одесса, СМИСЛ, 2008. - 192 с.;
5. Бежок В.Р. Руководство по ревизии , наладке и испытанию ШПУ Н. Донецк: ДонНТУ, 2009 – 671с.
6. Лотков Н. А., Ф. Г. Зуев Подъемно-транспортные установки;
7. Завозин Л. Ф. Шахтные подъемные установки. Государственное научно-техническое издательство литературы по горному делу. Москва, 1960;
8. Александров М. П. Подъемно-транспортные машины: Учеб. для машиностроит. спец. вузов. — 6-е изд., перераб. — М.: Высш. шк., 1985.—520 с.,
9. Малиновский А.К. Автоматизированный електропривод машин и установок шахт и рудников / А.К. Малиновский. – М.: Недра, 1987. – 277с.
10. Сайт о подъемно-транспортных машинах



 ДонНТУ
Портал магистров ДонНТУ
ДонНТУ
Портал магистров ДонНТУ
