Résumé des travaux de maîtrise sur: "L'optimisation du mouvement du appareil de levage aux étapes de la accroissement et le ralentissement"
INTRODUCTION
• Actualité
• Buts et les tâches
• Nouveauté scientifique et la valeur pratique
• Iimportance Pratique et méthodologique des résultats d’ouvrage
• Approbation d’ouvrage
REVUE DES ÉTUDES SELON LE SUJET
• Revue des études selon le sujet à DonNTU
• Revue des études selon le sujet en Ukraine
• Revue des études selon le sujet dans le monde
LA PARTIE PRINCIPALE
Introduction
- Les schémas cinématiques des installations de mine de levage. Les schémas de calculs
- L'analyse des diagrammes de l'accélération, la saccade et les efforts dans les installations de mine élévatrices
CONCLUSION
REFERENCES BIBLIOGRAPHIQUES
INTRODUCTION:
Mécanisme de levage des mines de charbon et de mineral est une des installations principales du complex technologique, duquel dépend à un fort degré la capacité de travail et la productivité de toute l'entreprise. Ce rôle du levage détermine des telles hautes démandes dont lequelles sont emiseés des exigences comme à l'installation en tout, ainsi que vers ses éléments séparés, y compris vers les système de la commande.
L'introduction du système de la commande sûr et moderne par le commande électrique de l'installation de levage de mine permet d'améliorer les caractéristiques d'exploitation et la qualité du fonctionnement de l'installation de levage de mine en tout. Conformément à cela l'élaboration et l'introduction des systèmes donnés est la tâche fondamentale.
Le but de la création du système moderne de la commande automatisée c’est la modernisation de la commande par les procès des démarrage et tréinage de la machine de levage, ainsi que le contrôle des paramètres et le diagnose de l'état de l'équipement de l'installation de levage à l'aide des moyens modernes de microprocesseurs et informatiques.[8]
Actualité d’ouvrage:
En rapport avec l'acquittement des gisements les plus accessibles des minéraux d’atil les mines et les mines minerales sont obligées de passer sur les horizons de plus en plus profonds. De plus pour la préservation de la productivité les installations de levage doivent avoir la plus grande vitesse du mouvement des skips et leur ça plus grande capacité de chargement.
Cet ouvrage est accompli dans la coopération avec les sujets scientifiques de la chaire, en tenant compte de l'expérience du travail de la société scientifique et de productive "MIDIEL" et les tendances scientifiques au plan de l'utilisé des systèmes modernes de la commande électrique par les sociétés étrangères. Particulièrement le spectre large de la production est proposé par telles sociétés, comme Elvovert (l'Autriche), SIEMENS (l'Allemagne), Schneider électrique (la France), ABB (la Suède, la Finlande), Danfoss (Danemark).
L'objet de l'étude il y a une installation de levage de mine de charbon.
L'objet d'élaboration – les systèmes : le convertisseur thyristor – commande , générateur – le moteur (G-M), le convertisseur de fréquence – moteur asynchrone (CF- MA) et CF-MS, aussi les tachygramme optimale du mouvements de l'installation.
Les principaux objectifs de ce projet:
• familiarisation avec le processus technologique de l'installation de levage;
• l'étude des variantes possibles du perfectionnement des systèmes des commandes électriques des installations de levage de mine;
• le simulation des régimes typiques l’installations de levage de mine
Problèmes des recherches.
Le but indiqué se réalise par la décision des tâches suivantes :
1. La considération du processus technologique des installations de levage en gros;
2. L'analyse comparative des systèmes possible de la commande par les installations de levage de mine:
• en courant continu sur le système le convertisseur commandé thyristeur– moteur;
• en courant alternatif sur le système convertisseur de fréquence – moteur asynchrone;
• en courant alternatif sur le système convertisseur de fréquence – moteur synchrone.
3. Le choix du système le plus rationnel de la commande électrique des installations de levage de mine;
4. L'élaboration du modèle mathématique de l'installation de levage de mine, pour la formation des tachygrammes optimales du mouvement d’un skip;
5. L'estimation des systèmes sur les indicateurs dynamiques aux régimes transituires.
La nouveauté scientifique des résultats des études comprend à :
1. L'élaboration de tel le loi de la commande, que permettrait de soutenir la constance du coef de surcharge dans la gamme examinée du changement de la fréquence de rotation, avec la formation des lois de la commande;
2. L'élaboration du modèle mathématique rationnel de l'installation de levage de mine pour l'étude des charges dynamiques.
L'importance pratique et méthodologique des résultats d’ouvrage comprend dans l'élaboration :
- Une nouvelle construction de l'organ de traction, permettant de réduire son poids et les charges dynamiques lors du mouvement du skip dans le puits;
- Les méthodes du choix du système le plus rationnel de la commande électrique de l'installation de levage de mine;
- Le modèle mathématique de l'installation de levage de mine pour l'étude des charges dynamiques;
L'approbation d’ouvragel.
Les positions principales et les résultats d’ouvrage ont été présenté, étaient rapportés et étaient examinés en telles conférences :
− Х de la conférence Internationale secience et technique. «L'automatisation des objets technologiques et procès. La recherche des jeunes» (Donetsk 2010);
− la conférence ukranienne des d'étudiantes technologique. «Les systèmes électrotechniques et électromécaniques» (Sébastopol 2010, les 20-22 avril).
REVUE DES ÉTUDES SELON LE SUJET
L'étude et l'optimisation des systèmes de l'installation de levage de mine s'occupaient par les professeurs de DonNTU :
• c.s.t.,le professeur Borissenko V. Ph. [1]
La faculté : Électrotechnique
La chaire : Commande électrique et l'automatisation des installations industrielles.
Les savants ukrainiens dans le domaine de la commande électrique des installation de levage de mine résolvent les problèmes suivants :
- Simulation de le commande électrique en tenant compte du type des moteurs électriques, avec l'aide des paquets Matlab (Simulink), ainsi que du convertisseur de commandé . On décrit les particularités de simulation des moteurs asynchrones et le calcule des régulateurs dans le système du réglage soumis vectoriel …. [2]
- On expose les informations principales sur l'électrification et l'utilisation rationnelle de l'énergie électrique aux entreprises élaborant les placers. On montre les particularités de la commande électrique des moteurs de montagnes et les mécanismes d'équipement électrique utilisé. [3]
- La considération complexe des systèmes électromécanique des mécanismes de levage de la montée et le déplacement horizontal, est donnée aussi leur description mathématique, les résultats de simulation, on amène les schémas structuraux les parties mécaniques et électromécanique des systèmes électromécanique. [4]
- La considération des particularités de la construction des commandes électriques asynchrones des moteurs de montagnes à la base de l'application en peu porte des commutateurs. On amène les résultats des études des procès. [5]
- La réduction des documents référentiels nécessaires à la conception des installations des levages de mines de la montée verticale. La considération des exemples au choix et le compte un des câbles et plus des câbles des installations des levages. Une grande attention est donnée plus des câbles à la montée, comme à l'aspect le plus effectif du transport vertical. On donne la théorie du compte des câbles pour plus des câbles de la montée et on définit sa vitesse optimale. [6]
- La considération des types des installations des levages de transport utilisées aux entreprises du complexe agro-industriel. La réduction des comptes nécessaires des mécanismes des moteurs des levages de transport et les installations. [7]
En dehors de l'Ukraine on résout les problèmes suivants :
- La considération des installations et l'exploitation des monte-charge modernes, le commande électrique et l'équipement des installations des levages fabriquées par les usines nationales. La considération de la structure de l'équipement des installations des levages: des cages de mine, skipes, les installations d'atterrissage, les installations de chargement et de déchargement, les câbles de levage et les sonnettes , ainsi que l'installation et les structures des parties mécaniques et électriques des monte-charge, l'équipement de commande et de mesure et protecteur des installations des levages. [8]
- Les considérations de la structure des modernes de moteurs des levages de transport, les principes de leur action, le domaine d'utilisation. La réduction des bases du choix, le compte et l'étude des mécanismes. On accorde l'attention aux questions de la mécanisation complexe et l'automatisation des productions, l'augmentation de la sécurité et la productivité des moteurs, ainsi que les questions de l'économie. [9]
Revu des élaborations:
L'apparition des systèmes de gestion en chiffre a augmenté la sécurité du système électromécanique en tout, ainsi qu'a permis de réaliser les algorithmes complexes de la gestion de le commande électrique, à son réglage et l’ouvrage stable.
La structure classique de la commande électrique l'installation de levage de mine du courant alternatif, ces derniers temps est la structure sur la base du convertisseur de la fréquence (CF-MS, le CF-MA), la considération de qui est préféré dans le travail donné.
Sur le marché mondial dans la technique convertisseur se sont détachées leaders, les sociétés suivantes: SIMENS, Shneider Electrique, Control Technique, ABB. Chaque nouvelle génération de la fréquence des convertisseurs contient de plus en plus des fonctions, des directeurs du moteur, ainsi qu'améliorant le processus de technologique. C'est pour l'essentiel les fonctions :
— Les garanties nécessaire des tachygrammes de la accroissement et le freinage;
— Le réglage de la vitesse en régime établi;
— les devoirs de la vitesse et l'accélération;
— La garantie du réverseur;
— Les autoréglages du convertisseur;
— Le traitement des signaux des liaisons en retour établies au système de gestion;
— L'organisation des contours de la gestion;
— Les protections du convertisseur du surcharge courant;
— La réalisation des algorithmes de l'économie énérgetique;
— La réalisation des divers principes de la gestion (est de fréquence-courant, vectoriel, l'administration directe pour le moment);
— Les visualisations des signaux;
— L'intégration du convertisseur au système de gestion le plus haut niveau (le réseau industriel);
—Les fonctions spéciales technologiques;
Pour le compte de l'application des fonctions indiquées insérées dans les systèmes modernes le commande électrique, les convertisseurs de la société Shneider Electrique ont trouvé l'application dans les commandes électriques suivants :
— Les groupes de pompages des systèmes modernes du chauffage (Altivar 21);
— Les systèmes de la ventilation des bâtiments et les constructions (Altivar 21);
— L'équipement élévatrice de transport (Altivar 71);
— Les ascenseurs (Altivar 71);
— L'équipemen d'emballage (Altivar 71);
—Les moteurs textiles (Altivar 71);
Les convertisseurs de la société Control Technique :
— La métallurgie (Unidrive SP);
— les mécanismes de grue (Unidrive SP);
— Les ascenseurs (Unidrive SP);
— Les pompes et les ventilateurs (Commander SK);
— Les convoyeurs (Commander SK);
—Les brassoirs (Commander SK);
Ainsi, la technique convertisseurs de transmission et moderne, fait les pas immenses dans le développement, en se perfectionnant constamment et par cela en augmentant la qualité des processus de technologique. Particulièrement important il y a de plus une production approches des nouvelles de son élaboration et la conception, avec la poursuite des moyens les plus puissants calculatoires. Pour le perfectionnement constant, les études scientifiques et les prises de décisions argumentées, éliminant les problèmes apparaissant sont nécessaires.
LA PARTIE PRINCIPALE:
Le commande électrique automatisé des monte-charge de mine (MCM) - une des directions impétueusement en voie de développement du commande des moteurs modernes industrielles, les mécanismes et les installations.
La spécificité du travail, la condition, à qui se réalisent les opérations de transport du déplacement des charges, les gens, les mécanismes, l'équipement de secours et de réparation, la présence d'un grand nombre MLM, travaillant dans de différentes zones climatiques et réalisant la montée (abaissement) de la profondeur de quelques des mètres, ainsi que des profondeurs près de deux kilomètres contribuaient à la mise en relief du commande électrique MLM à la direction séparée, qui a passé jusqu'à présent quelques étapes du développement.
Vers la première étape on peut, conventionnellement, porter une large application du moteur à induction avec le rotor à phases et les systèmes avec les convertisseur à la machine de électrique.
Le passage vers les systèmes, le convertisseur dirigé (statique) - le moteur (sur constant ou le courant alternatif) marque la deuxième étape. On peut constater que cette étape se prolonge et à présent, mais sur une nouvelle base d'élément et avec l'utilisation de la théorie de gestion moderne.
1. Schémas cinématiques des installations de levage de mine. Les schémas de calculs [1]
À présent sur les mines on exploite un grand nombre des installations de levage, les schémas cinématiques de qui peuvent être présentés dans l'aspect suivant (fig. 1):
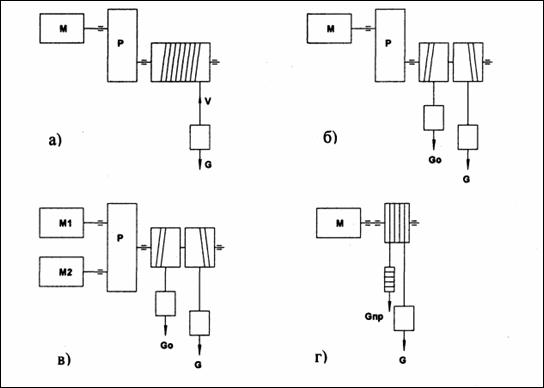
Figure 1 - Schémas cinématiques des installations de levage
(Sur les schémas on ne montre pas le système possible avec le câble équilibrant) : a) monomoteur un cage; b) monomoteur de deux skipes; c )de deux moteur de deux skipes; d)monomoteur avec la poulie de la friction et le contre-poids.
Pour le saut (passage) vers le schéma de comptes il est nécessaire de faire une série d'admissions :
- Les moments d'inertie des pièces de la machine séparées sont considérés concentrés aux points définis conventionnels;
- Les chaînons élastiques sont impondérables et se caractérisent par la rigidité constante;
- La déformation des chaînons élastiques se soumet à la loi de Guka;
- Les procès des ondulations dans les éléments élastiques est négligé.
Par l'étude de la conduite du système électromécanique (SEM) les moments d'inertie des chaînons séparés sont amenés, d'habitude, vers la fréquence de la rotation de l'appareil moteur (ou un autre chaînon donné).
Pour le cas du mouvement de rotation de la formule de la réduction :
 ,
,
En cas du mouvement de de translation :
 ,
,
À deux aspects du mouvement :
 .
.
Le moment de la résistance est amené à la fréquence de la rotation avec l'aide de l'expression:
 .
.
La rigidité au torsion:
 (Нм/рад),
(Нм/рад),
La rigidité à la distension (compression):
 (H/м ),
(H/м ),
La rigidité amenée:
 ,
,
 .
.
La rigidité équivalente au couplage en série des éléments:
 ,
,
À dérivation:
 .
.
Après la réduction des moments d'inertie et des rigidités des éléments les schémas cinématiques fig. 2:
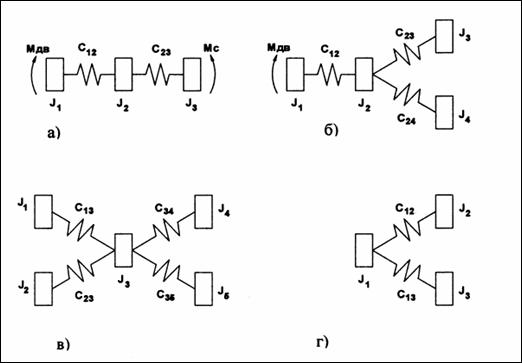
Figure 2 - Schémas de comptes des types l'installations de levage de mine
Sur la fig. 3, on amène de type non ramifié schéma trois massif de comptes. En tenant compte de tous les agents dans le système fig. 2 est transformé :
Figure 3 - Schéma de comptes trois massif, [1].
2. Analyse des tachygrammes de mouvement typiques , l’arroché et les efforts dans les installations de levage de mine
L’ouvrage de l'installation de levage se caractérise par le caractère cyclique, c'est-à-dire les cycles changeant côte à côte suivant l'un après l'autre. À son tour on peut casser chaque cycle à quatre périodes principales : la accroissement de vitesse, le mouvement régulièrement, le ralentissement jusqu'à l'arrêt complet et la pause.
Pour qu'assurer la productivité demandée de n'importe quelle montée, chaque cycle doit entrer à défini, d'avance le temps donné. Il est nécessaire de subir pour cela les significations de comptes de l'accélération et le ralentissement, le maximum de vitesse et la durée de la pause, c'est-à-dire subir le diagramme accepté de la vitesse. Le diagramme de la vitesse ascensionnelle est une dépendance de la vitesse du mouvement des récipients élévateurs du temps.
Les installations des levages en fonction de la destination et les hauteurs de la montée, l'aspect et la capacité de charge des récipients, les nombres des horizons servis, les distances entre eux peuvent travailler selon un des diagrammes suivants du mouvement (fig. 4) : de trois périodique, de cinq périodique, de six périodique, de sept périodique.
Figure 4 – Tachygramme de mouvement typiques l'installations de levage de mine
Le diagramme sur fig. 4 (a) est le plus simple et est appliqué pour des installations de cage des levages avec les cages sans étages non renversés aux terrains se balançant de réception. Dans le cas particulier t1 peut être égal t3 (les temps de la accroissement et le blocage), d'habitude le temps t3 ralentissement (blocage) est un peu plus petit que le t1.
Les plus complexe les diagrammes de la vitesse sont nécessaires à six- et sept - les périodes à la montée par camion avec les skipes renversés ou les cages. Cela s'exprime par la nécessité de la restriction de la vitesse du mouvement des récipients élévateurs des courbes de déchargement. C'est pourquoi la période se brise à deux terrains avec divers des l'accélérations. Même se rapporte et à la période du ralentissement.
Figure 5 – Diagrammes des efforts équilibré de deux final (a), déséquilibré avec renversé de skipe (b) et un cage (в) l'installation de levage.
Sur fig. 5 (a,b) diagrammes montrent b de l'effort de conduite sur la jante du tambour (la poulie de la friction) par l'installation équilibrée deuxfinale de levage avec non renversé les skipes au travail normal de la distribution de la charge et pour l'installation statiquement déséquilibrée de levage équipée des cages renversés ou skip. Des diagrammes des efforts il faut que les installations avec les cages non renversés ou skipes ont pendant la mise en marche moins d'effort sur l'arbre du moteur en comparaison des renversés. Cela s'exprime par ce qu'au renversement du récipient élévateur la partie de son poids vient sur les courbes de déchargement et ceux-ci il y a un encore grand déséquilibre du système s'accroissant en fin дотягивания au déchargement du récipient. C'est pourquoi au moment du renversement la création du moment considérable de frein sur l'arbre du monte-charge est nécessaire. On présente au même endroit les diagrammes de la vitesse du mouvement des récipients des levages U = f (t).
Le diagramme des efforts cages de l'installation de levage et cage (fig. 5,) se distingue beaucoup des diagrammes des efforts de la montée skip. Cela s'exprime par la complexité des manoeuvres à l'escale des cages sur les poings d'atterrissage ou les terrains se balançant.
Le maximum de vitesse du mouvement des récipients des installations purement par camion de levage des mines verticales et les mines ne doit pas excéder la signification :

Vmax - vitesse maximale du mouvement de levage, m / s, H-hauteur, m
Et en outre cette vitesse ne doit pas excéder 20m/s. La fréquence maximal de la rotation du moteur doit rester de la charge invariable au changement sur l'arbre du tambour du monte-charge, c'est à dire caractéristiques mécaniques du moteur doit être rigide.
L'augmentation des vitesses limites demande l'augmentation de l'accélération. Cependant l'augmentation de l'accélération crée les efforts supplémentaires dynamiques sur la partie mécanique du monte-charge et les câbles, l'influence négative sur les gens, le danger de la glissade du câble selon la poulie près des installations des levages avec les poulies de la friction.
Le moyen le plus efficace de réduire les forces dynamiques dans les éléments élastiques de la machine de levage et des câbles, de réduire les effets physiologiques sur l'homme - un changement en douceur d'un moment émouvant, c'est à dire restriction de l'accélération dérivés - l’arroché.[9]
Par exemple, considérons un système simulé dans une unité relative, le moteur de convertisseur à thyristors - (TC-M) avec la restriction arroché (fig. 9). Dans le système de simulation ont été étudiés sur démarrer, inverse, de freinage, de lancer et de dumping de la charge.
Pour la restriction de l'accélération et l’arroché, à la gestion de la vitesse de la machine de levage, vous pouvez remplacer l'intensité de consigne conventionnelles, ce qui est souvent appelé une intégrale (I-ZI) avec une intensité unité avancée de réglage avec limitation arroché (I2-ZI), le schéma structural est illustré à la figure 6, et les caractéristiques de base a la forme présentée dans la figure 7.
Cette ZI se compose d'un amplificateur de proportionnelle, le chaînon de la restriction , le chaînon vers la caractéristique de relais idéal et deux intégrateurs I1, I2.Avec l'aide des liaisons négatifs sont formés de deux contours, l'intérieur de ce qui est l'habituel ZI. Pour une manipulation plus précise à un administrateur système de I2-ZI peut être complétée par des liens de contrôle parallèle pour les dérivées première et seconde du signal d'origine, qui sont présentés sur la Fig. 7 lignes en pointillés. Les coefficients de la transmission de ces obligations sont élus parmi les conditions de «optimale modulaire.
Figure 6 - ZI avec la restriction de l’arroché.
Figure 7 - Caractéristique de sortie I2-ZI
Amené I2-ZI forme les signaux de la tâche sur la vitesse Uзи=kш*W ( W - la vitesse de l'appel du moteur, kw - le coefficient de la liaison en retour après la vitesse), l'accélération Uзп et l’arroché Uзр.
Sur la fig. 7 est désigné tзр - le temps de l'augmentation de l'accélération; tch - le temps de la chute (la diminution) de l'accélération; tу - le temps du changement (variation) de la vitesse avec l'accélération consolidée.
Nous définirons la constante du temps l'unité de réglage du courant:
Tзс=tс, où tс – le temps de la découpage de l’arroché.
La constante du temps ZI :
 , où Е0 – l'accélération;
, où Е0 – l'accélération; 
Unité de réglage de l'intensité s'installe dans la cellule ZI-2AI.
Le schéma structural du système du réglage de la vitesse de l'installation de levage de mine dans les unités relatives est amené sur le figure 8, mais le schéma I2-ZI sur le figure 9.
Figure 8 - Schéma de principe pour l'étude des régimes dynamique du installation de levage de mine

Figure 9 - Schéma du sous-système le I2-ZI
Comparer le comportement du système au démarrage de réglage d'intensité différentes.
Graphique transitoires au démarrage sans charge sont présentés sur la fig. 10-12, et avec la charge de la fig. 13-16. Graphique transitoires au démarrage sans charge sont présentés sur la fig. 10-12, et avec la charge de la fig. 13-16. Dans ces graphiques, les chiffres indiqués par le travail de l'habitude ZI (1) et ZI avec la restriction de l’arroché (2).
Comme on le voit sur les graphiques en utilisant le dépassement I2-ZI de courant a diminué à 1,13%, la valeur de l'accélération maximale de 0,0059, l’arroché de 0,001.
Les graphiques des transitions dans un système de contrôle du commande électrique IL au travail de I2-ZI à la charge de la figure. 13. Ces graphiques montrent que le système de contrôle du commande électrique IL satisfait à toutes les exigences du processus de fabrication et peut être recommandé vers l'introduction.
Figure 10 - Graphiques des transitoires au démarrage sans charge
Figure 11 – Graphiques de l'accélération au démarrage sans charge
Figure 12 – Graphiques de l'arroché au démarrage sans charge
Figure 13 – Graphiques des transitoires au démarrage avec une charge
Figure 14 – Graphiques de l'accélération au démarrage avec une charge
Figure 15 – Graphiques de l'arroché au démarrage avec une charge
Figure 16 - Graphiques des transitoires d’ouvrage selon tachygramme
CONCLUSION:
À l'étape donnée du travail, on passait les études du dynamique d'EMS IL avec le commande, par le système CT-M étaient accomplis dans le milieu de MatLab (l'application Simulink) et ont montré la possibilité de la réalisation le tachygramme souhaité les mouvements du système aux étapes de la accroissement , le ralentissement et le blocage du système.
À l'orthographe (rédaction) de l'exposé donné le travail magistère n'est pas encore terminé. La date d'achèvement planifiée du travail : la deuxième décade de décembre de 2010. Le texte intégral du travail peut être reçu chez l'auteur (Lazareva M. V) ou le maître (Borisenko V. F) après la date indiquée.
REFERENCES BIBLIOGRAPHIQUES:
1. Борисенко В.Ф. Электромеханические системы автоматизации стационарных установок. Сборник трудов ХII международной научно-технической конференции, - Донецк 2005., 283с.;
2. Алексеев В.В., Козярук А.Е., Загривный Э.А. Электрические машины. Моделирование электрических машин приводов горного оборудования;
3. Багаутинов Г.А. и др. Основы электропривода. Электрооборудование горных машин и механизмов карьеров и приисков ;
4. Герасимяк Р.П. Анализ и синтез крановых электромеханических систем, - Одесса, СМИСЛ, 2008. - 192 с. ;
5. Бежок В.Р. Руководство по ревизии , наладке и испытанию ШПУ Н. Донецк: ДонНТУ, 2009 – 671с.
6. Лотков Н. А., Ф. Г. Зуев Подъемно-транспортные установки;
7. Завозин Л. Ф. Шахтные подъемные установки. Государственное научно-техническое издательство литературы по горному делу. Москва, 1960;
8. Александров М. П. Подъемно-транспортные машины: Учеб. для машиностроит. спец. вузов. — 6-е изд., перераб. — М.: Высш. шк., 1985.—520 с.,



 Le portail magistère DonNTU
Le portail magistère DonNTU
