|
|
| Русский | Українська | English |
 |
Магистр ДонНТУ
Факультет: «Компьютерных информационных технологий и автоматики» (КИТА) Кафедра: «Горная электротехника и автоматика имени Р. М. Лейбова» (ГЭА) Специальность: «Автоматизированное управление технологическими процессами» (АУП) Тема квалификационной работы магистра: «Исследование и разработка тягового электропривода переменного тока аккумуляторного электровоза с системой автоматического управления» Научный руководитель: к.т.н., доцент кафедры ГЭА |
|
АВТОРЕФЕРАТ | ||||||||||||||
|
СОДЕРЖАНИЕ
ВВЕДЕНИЕ |
||||||||||||||
|
Последние достижения в области создания силовых полупроводниковых элементов, а также развитие микропроцессорной техники на базе микроконтроллеров открывают широкие возможности для задач повышения эффективности систем электропривода. При этом необходимы теоретические исследования конкретной электромеханической системы, для того чтобы наиболее рационально обосновать параметры электропривода. Относительная простота регулирования скорости и поддержание тягового усилия на заданном уровне определило применение на рудничных электровозах электродвигателей постоянного тока последовательного возбуждения (ДПТПВ). Однако данные двигатели, при эксплуатации имеют ряд недостатков: низкий ресурс и надежность коллекторного узла, якорных и полюсных обмоток двигателей, повышенная трудоемкость их обслуживания. В свою очередь, простои оборудования, вызванные ремонтными работами, снижают эффективность технологического процесса транспортирования горной массы. Вышеизложенные недостатки обуславливают необходимость поиска альтернативных решений при создании регулируемого электропривода аккумуляторных электровозов, применяемых в горном производстве. В ходе выполнения магистерской работы ставится следующая цель – обосновать возможность применения безколлекторного двигателя переменного тока в составе тягового электропривода аккумуляторного электровоза с системой автоматического управления. Анализируя достоинства и недостатки ДПТ в качестве тягового органа рудничного электровоза (РЭ), сформулирована задача исследований в области совершенствования электропривода, система управления которого должна обеспечивать:
Одной из альтернатив построения электропривода является применение вентильного двигателя (ВД). Поэтому выделяем следующие задачи: исследование процессов и научное обоснование параметров ВД с автономным инвертором для условий шахтного электровоза; обоснование структуры электропривода с системой автоматического управления; конструктивная разработка силового электропривода с автоматической системой управления на современной базе силовых полупроводниковых элементов и микропроцессорной техники. Объектом исследований является шахтный аккумуляторный электровоз с системой автоматического управления. Предметом исследований является тяговый электропривод аккумуляторного электровоза на базе двигателей переменного тока. Методы исследований заключаются в реализации математической модели обобщенной машины переменного тока с помощью программных инструментов моделирования в Matlab и математических расчетов. Недостаточная надежность двигателя постоянного тока в составе тягового электропривода, его высокая стоимость, обусловливает необходимость разработки альтернативных систем электроприводов на базе двигателей переменного тока. Одна из альтернатив – это построение электропривода на базе вентильного двигателя, имеющего некоторую схожесть механических характеристик и лишенного недостатков двигателя постоянного тока из-за отсутствия коллекторного узла. Применение вместе с ними регулируемого автономного инвертора напряжения позволило бы решить задачу совершенствования электропривода шахтного аккумуляторного электровоза. В связи с этим актуальна задача исследования процессов и научного обоснования параметров ВД с автономным инвертором для условий работы шахтного электровоза. Для этого необходимо более глубокое изучение процессов в системе «автономный инвертор – ВД» с целью научного обоснования параметров схем преобразователей, вентильного двигателя и системы автоматического управления. Научная новизна работы предполагается в следующих двух пунктах:
4. ПЛАНИРУЕМЫЕ ПРАКТИЧЕСКИЕ РЕЗУЛЬТАТЫ В ходе исследований, связанных с разработкой тягового электропривода переменного тока аккумуляторного электровоза и системы автоматического управления, планируются такие практические результаты, как:
5. ОБЗОР ИССЛЕДОВАНИЙ И РАЗРАБОТОК ПО ТЕМЕ В настоящее время шахтные электровозы оснащаются электродвигателями постоянного тока с последовательным возбуждением, что обусловлено сравнительной легкостью регулирования частоты вращения, а также мягкостью механической характеристики двигателя, способствующей выравниванию нагрузок при параллельной работе двух двигателей. На практике изменение частоты вращения двигателя осуществляется посредством амплитудного (реостатные системы) или импульсного (тиристорные системы) управления напряжением якорной обмотки [1,2]. Наиболее эффективным является последний способ. При данном методе тяговый электропривод периодически включается и отключается от сети. В этом случае среднее напряжение на двигателе составляет:
где E – э. д. с. источника питания; tB и tO соответственно длительность ускоренного и замедленного движений; T = tB + tO – период повторения, соответствующий заданной частоте следования импульсов. Изменение среднего значения напряжения влечет за собой изменение угловой скорости тягового двигателя согласно выражению:
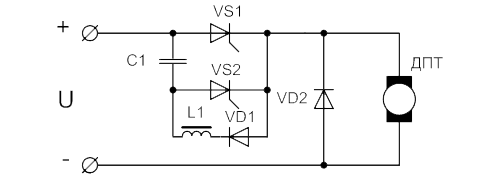
Первый вариант импульсного привода для промышленного контактно-аккумуляторного электровоза был разработан в 1968 в Днепропетровском институте инженеров железнодорожного транспорта. А система регулирования скорости ДПТПВ представляла собой два преобразователя, включенных по схеме (рис. 5.1) и работающих со сдвигом по фазе на пол периода [3].
Рисунок 5.1 – Импульсный регулятор постоянного напряжения Сейчас для автоматизации электропривода рудничного аккумуляторного электровоза при тиристорном управлении применяется аппаратура ТЕРА (локомотивы АРП-8, АРП-14). Силовая схема данной аппаратуры управления представлена Импульсным Тиристорным Прерывателем (ИТП). Схема ИТП имеет большие потери в контуре коммутации из-за необходимости производить циклы заряда и перезаряда коммутирующих конденсаторов и большие габариты коммутирующего контура, но и большую надежность, особенно при работе от маломощного источника питания [2]. Другое направление развития является осуществление бесконтактного способа передачи электрической энергии из сети. Созданный в Днепропетровском горном институте под руководством д.т.н. Пивняка Г. Г. высокочастотный электровоз В14-900 питался от сети переменного тока частотой 5 кГц посредством электромагнитной индукции между изолированным контактным проводом и токоприемником, решая, таким образом, проблему искробезопастности контактной тяговой линии и имел при этом привод постоянного тока [4]. Недостатки электропривода постоянного тока требуют применения в качестве тягового привода электровоза более надежных и дешевых бесколлекторных двигателей переменного тока, а также, как вариант, вентильных и вентильных реактивных двигателей. Одним из вариантов является использование асинхронного двигателя с короткозамкнутым ротором в качестве тягового органа, являющимся альтернативой двигателю постоянного тока и лишенного его недостатков. В 1985 году Я. Дзидовским, М. Хефчицем и Ф. Щуцким (Польша) [5] был разработан асинхронный электропривод для рудничных электровозов. В качестве преобразователя был применен автономный инвертор, выполненный по трехфазной мостовой схеме с индивидуальной коммутацией тиристоров, и работающий в режиме широтно-импульсной модуляции (ШИМ). Данная система управления позволила получить тяговые характеристики, соответствующие характеристикам двигателя постоянного тока. Однако недостатком данной схемы стало большое число элементов принудительной коммутации, снижающее надежность силовой схемы, а также малая величина выходного напряжения инвертора, обусловленная низким уровнем напряжения на АБ рудничного электровоза [6]. Дальнейшее совершенствование силовых схем шло на основе разработок, связанных с применением силовых ключей с полной управляемостью – IGBT-транзисторов. Изготовленный в 1990 г. в ЮАР опытный образец рудничного аккумуляторного электровоза на АД имел преобразователь, состоящий из силовых транзисторов, что позволило упростить силовую часть, исключив звенья принудительной коммутации и повысить при этом надежность преобразователя [7]. Его силовая часть, представленная трехфазным мостовым автономным инвертером напряжения (АИН), в режиме ШИМ обеспечивает синусоидальную форму выходного напряжения с диапазоном регулирования 0,3..35 Гц и выходным напряжением 5..55 В. Но данный преобразователь имеет существенный недостаток – пониженное выходное напряжение преобразователя. Работа по исследованию вентильного реактивного двигателя (ВРД), проведенная в ДонНТУ Г. В. Демченко под руководством д.т.н. Дудника М. З. [8], свидетельствует о возможности его применения в качестве тягового привода РЭ. Однако, имеется ряд трудностей, связанных с необходимостью разработки как вентильного преобразователя с системой управления, так и специального ВРД. Но наиболее перспективным вариантом построения силового электропривода является применение вентильного двигателя на базе синхронной машины с возбуждением от расположенных на роторе постоянных магнитов, теоретическая база для этого рассматривается в работах [9, 10, 11]. Применение постоянных магнитов на роторе дает возможность избавиться от щеточного контакта, уменьшается момент инерции ротора, нет необходимости в сложной системе охлаждения, в виду отсутствия нагреваемых током роторных обмоток. Кроме того, данная электрическая машина обладает высокой статической точностью и широким диапазоном регулирования скорости. Однако, она обладает более высокой стоимостью, чем асинхронная в виду применения постоянных магнитов, изготовленных из редкоземельных элементов. 6. КРАТКОЕ ИЗЛОЖЕНИЕ СОБСТВЕННЫХ РЕЗУЛЬТАТОВ Двигатели постоянного тока с последовательным возбуждением, применяемые в рудничных локомотивах, имеют ряд недостатков: низкий ресурс и надежность коллекторного узла, якорных и полюсных обмоток двигателей, повышенная трудоемкость их обслуживания. В свою очередь, простои оборудования, вызванные ремонтными работами, снижают эффективность технологического процесса транспортирования горной массы. Вышеизложенные недостатки обуславливают необходимость поиска альтернативных решений при создании регулируемого электропривода аккумуляторных электровозов, применяемых в горном производстве. Одной из альтернатив является применение вентильных двигателей (ВД) на базе синхронных машин. Классической формой тяговой характеристики, является характеристика с тремя участками: жестким, мягким и участком постоянной мощности (сама характеристика 2) (рис. 6.1) [12, 13]. Характеристика представляет собой так называемую «тяговою область», ограничивающую возможные рабочие режимы привода. На максимальное значение развиваемой скорости (соответствующее линии 1) накладывается ограничение по требованиям безопасности и, в ряде случаев, состоянием пути, линии 3 соответствует ограничение тягового усилия по сцеплению.
Рисунок 6.1 – Классическая тяговая характеристика электропривода электровоза Электроприводу шахтного электровоза свойственны частые перегрузки, имеющие место в режимах пуска и торможения. Необходимость работы электропривода, как в двигательном, так и в тормозном режимах, а также переменные нагрузки обусловливают значительные колебания мощности, потребляемой приводом. Исходя из вышесказанного, основным требованием к электроприводу является его устойчивая работа во всем диапазоне варьирования тяговых (тормозных) усилий при условии ограниченности энергоемкости АБ. Перспективным вариантом построения тягового электропривода является применение беcколлекторного двигателя постоянного тока (БДПТ) – магнитоэлектрической синхронной машины с трапецеидальным распределением магнитного поля с использованием датчика положения ротора (ДПР) и полупроводникового коммутатора (КП) (рис. 6.2). В данном случае на выходе КП и соответственно на обмотках синхронной машины формируется прямоугольное напряжение. Возможные варианты поcтроения электропривода и системы управления приведены в [11, 14, 15].
Рисунок 6.2 – Функциональная модель БДПТ Регулирование частоты вращения и вращающегося момента двигателя осуществляется посредством управления средним током на автономном инверторе с использованием широтно-импульсной модуляция (ШИМ). Исследуемый ВД рассматриваем во вращающейся системе координат d – q, сориентированной по вектору потока ротора Фf (рис. 6.3). ВД будет развивать максимальный движущий момент, если между вектором iq и Фf будет неизменным угол Θ = 90. Для обеспечения этого условия система управления, с помощью датчика положения ротора, должна соответствующим образом формировать тока и напряжения в обмотках статора.
Рисунок 6.3 – Пространственное размещение вращающейся системы координат ориентированной по вектору Фf В операторном виде динамическая модель ВД описывается системой уравнений [16]:
где n – количество пар полюсов; Из этих выражений следует, что при Фf = const электромагнитный момент двигателя однозначно определяется составляющей тока i1q. Следовательно, наиболее экономичным режимом работы вентильного двигателя является такой, при котором обеспечивается равенство нулю тока i1d, что соответствует наименьшему значению тока, потребляемого при данной нагрузке. Наиболее приемлемым для наших условий является такой режим ВД, когда угол между напряжением статора и ЭДС ротора составляет ψ = 0. При этом проявляется только поперечная реакция якоря (ротора), и машина потребляет реактивную энергию, развивая максимальный момент, пропорциональный току статора. При условии ограничения потребления электрической энергии со стороны АБ этот режим можно осуществить при питании ВД от автономного инвертора напряжения (АИН) по закону коммутации 120°. Система управления базируется на применении инвертора (UZ), построенного на IGBT-транзисторах, не только для переключения фаз, а и для широтно-импульсной модуляции напряжения, поданного на статор. При этом инвертор работает в режиме автономного инвертора напряжения и имеет обратные диоды (рис. 6.4).
Рисунок 6.4 – Принципиальная схема АИН тягового электропривода Как видно из системы уравнений (6.1) составляющие напряжений u1d и u1q одновременно зависят от составляющих токов по осям d – q. Для устранения этой связи в модели ВД введем дополнительные искусственные ЭДС:
При разделении каналов управления уравнения напряжений будут иметь вид:
Для обеспечения необходимых динамических и статических характеристик электропривод построен по принципу системы подчиненного регулирования. Синтез регуляторов в системе подчиненного регулирования ВД осуществляется аналогично, как и для двигателя постоянного тока. Структурная схема приведена на рис. 6.5.
Рисунок 6.5 – Расчетная структурная схема системы управления ВД На схеме обозначено: Wп(p) – передаточная функция силового преобразователя; W1(p), W2(p) – передаточная функция вентильного двигателя, соответственно его электрическая и механическая части; Кп, Тп – коэффициент усиления и наименьшая постоянная времени силового преобразователя; Тм – электромеханическая постоянная времени двигателя; Wрс, Wрт – передаточная функция регулятора скорости и тока; Кт, Кс – коэффициенты обратных связей по току и скорости; ωз, Iз – задающий сигнал по скорости и току. Настраивая систему управления ВД на модульный оптимум, передаточные функции регуляторов имеют вид:
В нашем случае зададимся электродвигателем мощностью 20 кВт, эквивалентный к двигателю постоянного тока, применяемого на рудничных локомотивах. В соответствии с тяговой диаграммой (рис. 6.1) мощность, потребляемая двигателем, должна оставаться независимой при разной нагрузке на электродвигатель. Исходя из ограниченности энергоемкости аккумуляторной батареи, необходима оптимизация потребляемой мощности, что решается применением блока ограничителя тока (БОТ), ток ограничения определяется из выражения:
Алгоритм работы БОТ приведен на рисунке 6.6.
Рисунок 6.6 – Алгоритм работы блока ограничения тока
Рисунок 6.7 – Структурная схема исследуемой модели ВД Семейство естественных и искусственных механических характеристик ВД с разными Ропт представлены на рис. 6.7 а).
Рисунок 6.8 – Результаты моделирования: а) тяговые характеристики ВД; б) зависимость потребляемой мощности ВД от момента сопротивления на валу Естественные механические характеристики ВД при использовании системы управления с подчиненным регулированием (рис. 6.5) достаточно жесткие (рис. 6.8 а)), применяя оптимизацию по току задания на регуляторе тока РТ с помощью блока ограничения тока БОТ, получаем искусственные механические характеристики, аналогичные механическим характеристикам двигателя постоянного тока с последовательным возбуждением. Также в результате моделирования была получена графическая зависимость между потребляемой мощностью привода и моментом сопротивления на валу (рис. 6.8 б)), из которой видно, что при изменении нагрузки, потребляемая мощность ВД остается постоянной. Таким образом, полученные характеристики вентильного привода, отвечают необходимым условиям управления тяговым приводом (рис. 6.1), при изменении нагрузки на двигатель потребление энергии остается практически постоянной, что подтверждает возможность использования ВД в системе привода шахтного электровоза в условиях ограниченности электроемкости аккумуляторной батареи. Учитывая требования к системе управления, рассмотренные выше и в [13], целесообразно реализовать ее на базе микропроцессорной техники. Примерная структурная схема системы управления тяговым вентильным приводом приведена на рис. 6.9. В ней используется микроконтроллер с ШИМ-функциями (AT90PWM3) [17]. На рисунке сигналы управления с пульта управления электровозом машиниста (B) поступают на порты микроконтроллера (MC). На МC с датчика тока (I) и датчика положения ротора (D) поступает информация, которая программно обрабатывается и в соответствии с сигналами управления вырабатываются управляющие сигналы на драйверы силовых ключей инвертора (G) и драйвер устройства торможения (J). На схеме A, E – блоки питания; C – аккумуляторная батарея, F – синхронная машина, H – автономный инвертор напряжения, L – силовой ключ и сопротивление динамического тормоза.
Рисунок 6.9 – Структурная схема системы управления тяговым вентильным приводом: Таким образом, вентильный двигатель становится реальной альтернативой ДПТ. Кроме того его система управления с небольшими изменениями сходна с системой управления ДПТ. Рассмотренная структура вентильного привода с системой автоматического управления является перспективной, лишена недостатков исходного электропривода, кроме того уменьшается момент инерции ротора, нет необходимости в сложной системе охлаждения, в виду отсутствия нагреваемых током роторных обмоток. Но необходимо отметить, что применение АИН вносит вопрос о способах охлаждения силовых ключей. Дальнейшие исследования в данной области должны касаться конструктивной разработки силового электропривода с автоматической системой управления на современной базе силовых полупроводниковых элементов и микропроцессорной техники. Применение в тяговом электроприводе РЭ ДПТПВ имеет ряд недостатков, связанных с конструктивными особенностями электродвигателя, что влечет за собой его низкую надежность и малый ресурс работы. Данные электродвигатели имеют высокую стоимость и из-за частых поломок требуют ремонта, что отрицательно сказывается на всем технологическом процессе транспорта. В связи с этим актуальной становится задача применения в качестве тягового органа электропривода переменного тока, обладающего более высокими показателя надежности и меньшей стоимостью. Также становится актуальным вопрос по построению системы автоматического управления для данного электропривода. Рассмотренные технические решения в области создания тягового электропривода шахтного электровоза, показали возможность применения других схем электроприводов. Одним из вариантов является использование асинхронного двигателя с короткозамкнутым ротором в качестве тягового органа, являющимся альтернативой двигателю постоянного тока и лишенного его недостатков. Но наиболее перспективным вариантом построения силового электропривода является применение ВД на базе синхронной машины с возбуждением от расположенных на роторе постоянных магнитов. В области моментов, близких к номинальным, его характеристики довольно близки к характеристикам двигателя постоянного тока и, учитывая, что для его управления необходимо изменять напряжение питания (выходное напряжение инвертора), система управления данным двигателем, в некоторой степени, должна напоминать систему управления ДПТ – система подчиненного регулирования по скорости и току. Однако, мощность, потребляемая двигателем, должна оставаться независимой при разной нагрузке на электродвигатель. Исходя из ограниченности энергоемкости аккумуляторной батареи, необходима оптимизация потребляемой мощности, что решается применением блока ограничителя тока (БОТ). Кроме того структура построения ВД имеет ряд особенностей, связанных с наличием перекрестных связей и реактивного момента, что необходимо учитывать при построении системы автоматического управления электроприводом. В результате проделанной работы была разработана исходная структура электропривода с системой автоматического управления, создана математическая модель системы АИН-ВД с регуляторами тока и скорости и блоком ограничения тока БОТ. По результатам математического моделирования были получены искусственные механические характеристики, которые аналогичны механическим характеристикам двигателя постоянного тока с последовательным возбуждением. А из графической зависимости между потребляемой мощностью привода и моментом сопротивления на валу видно, что при изменении нагрузки, потребляемая мощность ВД остается постоянной. Но необходимо отметить, что применение АИН вносит вопрос о способах охлаждения силовых ключей. Дальнейшие исследования в данной области должны касаться конструктивной разработки силового электропривода с автоматической системой управления на современной базе силовых полупроводниковых элементов и микропроцессорной техники. СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
|
|
При написании данного автореферата магистерская работа еще не завершена. Дата окончательного завершения работы: 1 декабря 2010 г. Полный текст работы и материалы по теме могут быть получены у автора или его научного руководителя после указанной даты. |
© ДонНТУ Максимчук Н. И., 2010 |