| Rus Ukr Eng | РЕФЕРАТ |
Кафедра: Геоинформатики и геодезии
Специальность: Землеустройство и кадастр

Абдаллах Ранг А
Тема выпускной работы:
Обновления цифровой карты с использованием космических снимков и DGPS технологий.
Научный руководитель:Професcор, Доктор Технических Наук, С.Г.Могильный
Введение
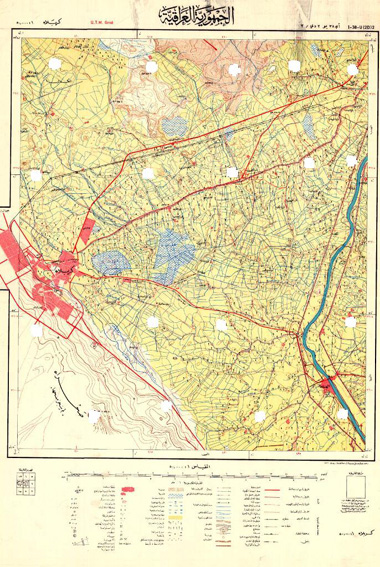
В данной научной работе приведены подробные объяснения относительно обновления старых карт с использованием интеграции системы Дистанционного Зондирования Земли (ДЗЗ), Дифференциальной Глобальной Системы Позиционирования (DGPS) и Геологической Информационной Системы (GIS). Особенно в странах с большой площадью, таких как Ирак, существуют тысячи карт, которые не обновлялись десятки лет, однако они содержат очень важную и нужную информацию, которую необходимо учитывать и использовать. В то же время мы не можем полностью полагаться на данные, которые содержатся в этих картах, поскольку они не отражают реальную картину поверхности исследуемой территории в связи с изменениями, которые произошли на ней. Таким образом, главная идея данной работы состоит в том, чтобы найти точный, практический, быстрый и экономичный способ обновления карт с помощью информации, полученной с помощью дистанционного зондирования. Кроме того, были соблюдены все условия и произведены все необходимые исследования для обновления карты исследуемого района в городе Кербела с масштабом 1:50000, которая обновлялась в последний раз в 1984 году.
Обновления осуществлялись в три этапа:
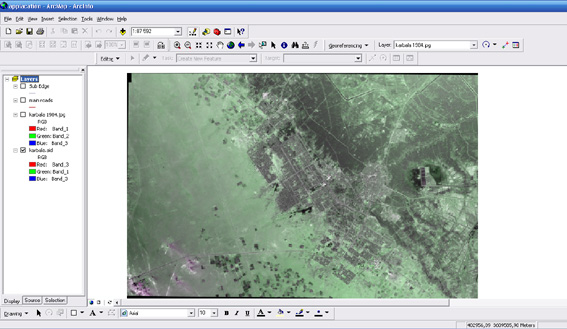
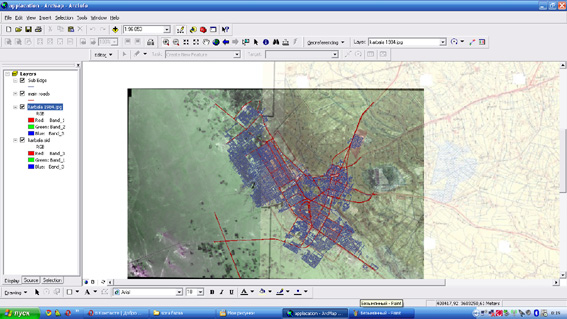
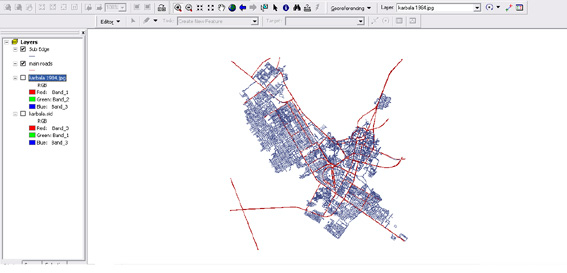
1 – - этап: этап цифровой обработки космических снимков и карт. Данный этап предусматривает цифровую обработку космических снимков с помощью ArcGIS9. После объединения системы координат космического снимка и карты, процесс получения информации от них начался с помощью контролируемой классификации Системы анализа данных о ресурсах Земли, где эта информация подразделяется на слои. Для выявления изменений, которые произошли на карте, процесс обновления карт осуществляется с помощью ArcGIS 9 путем сравнения каждого слоя, извлеченного из космического снимка, с его аналогом в карте; и изучения расширения в городе Кербала и изменение, которые произошли в сети дорог и каналов.
2 - этап полевых исследований: этап полевых исследований начинается с обнаружения всех частей исследуемой территории и выбора четких точек на спутниковом снимке, в качестве опорных точек (GCP), используемые далее для геометрической коррекции изображения. Наблюдения производятся с помощью высокоточной (DGPS) модели (Trimble), которая начала наблюдение за базовой точкой. Затем наблюдения производятся в опорных точках во всех частях исследуемой территории. Для того, чтобы преобразовать данные, полученные со спутниковых изображений с системой координат, мы производим наблюдение за некоторыми горизонтальными опорными точками с помощью Всемирной геодезической системы координат (WGS84). Поскольку эти горизонтальные опорные точки имеют значения координат в старой системе Ирака (Clarck), семь параметров преобразования данных рассчитываются с помощью уравнений преобразования данных. Последнее наблюдение на данном этапе будет проводиться за 30 точками, расположенными по всей территории исследуемого региона. Каждая из этих точек представляет собой четкие функции, такие как, точка пересечения двух и более линий или транспортная развязка, которые будут использоваться при оценке точности полученных карт.
3 -изготовление карт: эта стадия состоит из двух частей: первая часть заключается в производстве цифровых карт, которые совместимы с ГИС. Вторая часть включается в оценке точности изготовленных карт.
Актуальность
Технический прогресс не стоит на месте, появились новые технологии, совершенствуются программы, используемые для обработки данных и составления более точных и подробных карт для больших и удаленных территорий. Актуальность непосредственно связывается с самим материалом исследования, его спецификой.
Научная значимость
Научная значимость состоит в том, чтобы обновить данные и создать точную современную карту для исследуемого региона. Недостаточная изученность данного вопроса требует получения новых данных, структурирования информации. Полученные результаты помогают найти точный, практический, быстрый и экономичный способ обновления карт с помощью дистанционного зондирования.
Практическая ценность
Практическая ценность данной научной работы заключается в возможности использовать полученный опыт для составления цифровых карт для любых территорий.
Реферат по теме выпускной работы
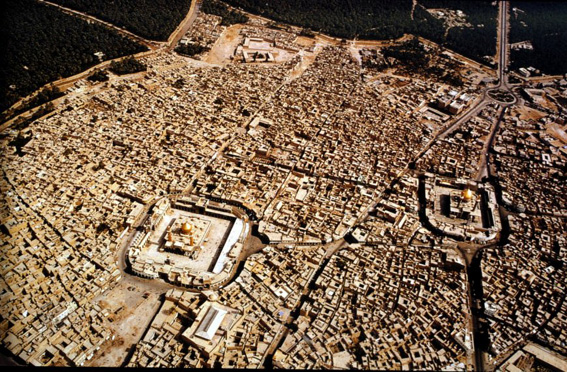
Почему мы выбрали город Кербела в качестве исследуемой территории?
Причин несколько: во-первых, разнообразие растительного покрова и землепользования, водоснабжения, сельского хозяйства, зданий и дорог.
Во-вторых, город Кербела представляет историческую и социальную ценность, тем самым город является свидетелем масштабных изменений, происходящих во всех сферах жизни. В-третьих, наличие исходных данных, например, спутниковых снимков и топографических карт. И последний аргумент: изготовленные в данной научной работе цифровые карты, особенно обновленные карты, могут быть полезными для текущих проектов.
Топографические карты очень важны и необходимы в современной жизни. Многие исследовательские центры проявляют повышенный интерес к топографическим картам, обновление которых необходимо для специалистов, проектировщиков и дизайнеров в сфере гражданского строительства для планирования и создания сети транспортных магистралей и других дорог, развития и защиты природных ресурсов и окружающей среды, а также для туристического сектора.
Проблема, с которой столкнулись специалисты, состоит в том, как обновлять топографические карты, которые охватывают огромные территории, которые весьма быстро видоизменяются, так как данный процесс требует много времени, усилий и денежных затрат. Ирак является одной из тех стран, где около 95% топографических карт с масштабом 1:25000, 1:50.000 и 1:100,000 не обновляются, а если и обновляются, то только карты с малым охватом территорий.
Целью модернизации карт является возможность внесения изменений в карту региона с тем, чтобы помочь проектировщикам в их работе. Несомненно, что постоянное обновление топографических карт с помощью традиционных методов является невыполнимой задачей в наши дни, так как требует огромных информационных ресурсов. Поэтому развивающиеся страны понимают важность создания современных топографических карт своих территорий, для чего и они используют передовые научные методы развитых стран.
На смену традиционным методам обновления топографических карт, требующих значительных временных и материальных затрат, возникла идея применения дистанционного зондирования и DGPS (Дифференциальная Глобальная Система Позиционирования). С момента появления космических снимков многие агентства и учреждения пытались применять данный метод обновления топографических карт, и только в последние годы стали использовать мультиспектральные и мультиразрешающие изображения, полученные со спутников. Интеграция дистанционного зондирования, DGPS (Дифференциальная Глобальная Система Позиционирования) и GIS (Геологическая Информационная Система) помогут в обновлении топографических карт с наивысшей точностью при минимальных затратах.После успешного запуска спутника IKONOS в 1999 году, стал доступен новый источник для получения изображения пространственных координат гражданских объектов. Во многих уголках мира космические снимки высокого разрешения от IKONOS оказались полезными источниками для создания ортотрансформированных изображений и продуктов ассоциированного отображения. Одним из главных преимуществ изображения спутниковых данных заключается в простоте исследования тех районов, которые ранее были тяжело доступными и опасными при использовании традиционной аэрофотосъемке. Однако для легкодоступных участков земной поверхности, при исследовании которых применяется традиционная высокоразрешающая аэрофотосъемка, данный метод не является актуальным.
Обновление старых топографических карт составляла сложность для картографов при использовании аналоговых процессов. В настоящее время, одновременное использование гибкости цифровой обработки и многократности спутникового наблюдения приводит к быстрому и эффективному обновлению топографических карт
Главная цель данной научной работы заключается в определении процедуры обновления старых топографических карт с детальными рекомендациями для их оцифровывания. Вторая цель данной работы состоит в том, чтобы создать обновленную карту с использованием DGPS, дистанционного зондирования и GIS для получения высокоточных цифровых многофункциональных карт для исследуемого региона.
Процесс обновления карт является сложным процессом и требует много времени и усилий по сравнению с использованием традиционных методов. Однако с использованием методов дистанционного зондирования, DGPS и ГИС, усилия становятся менее затратными в денежном и временном выражении, а карты более точными.
Заинтересованность в использовании GPS возникла более десяти лет назад. В последние годы эта заинтересованность значительно возросла, в первую очередь благодаря общему совершенствованию технологии спутниковой связи, модернизации методики обработки данных с помощью GPS и развертывания полного созвездия (спутниковое созвездие - конфигурация группы спутников GPS в космическом пространстве) из 24 спутников. Совершенствование технологии спутниковой связи позволят более точно определить трехмерную позицию, в то время как полное созвездие обеспечивает достаточное количество спутников для полной геометрии 24 часа в сутки по всему миру. Это развеяло первоначальные сомнения относительно зависимости от Глобальной системы позиционирования как универсального практического инструмента, и таким образом сделало GPS весьма перспективным для использования в картографических приложениях.
Использование GPS в качестве высокоточного метода позиционирования является бесспорным. Высокая точность стала достижима с применением GPS как в статическом, так и в кинематическом режимах. При нынешних мощных алгоритмах обработки данных, позволяющих в значительной мере сократить время сбора и обработки данных, практически не существует различия между двумя методами. Наблюдения с помощью GPS дают относительное геометрическое определение точек для того, чтобы приемники могли одновременного наблюдать за одними и теми же спутниками. Процедура определения местоположения точек упрощается благодаря наличию многих (более четырех) спутников в окне просмотра. GPS необходимы данные наблюдений, по крайней мере, с четырех спутников и нескольких приемников для точного местоопределения в статическом режиме, и, по меньшей мере, пяти спутников, которые необходимы в кинематическом режиме. С настоящим созвездием из 24 GPS спутников развернутых по всему миру, необходимое количество одновременно наблюдаемых спутников легко достижимо. Наличие спутников ГЛОНАСС (Глобальная навигационная спутниковая система) и существующих исследований в сочетании GPS и ГЛОНАСС может лишь помочь ситуации. Два типа наблюдаемых сделаны в GPS позиционировании – псевдодальность и фаза несущей частоты. Псевдодальность – это расстояние между спутником и приемником, вычисленное по времени распространения сигнала кода (C / A код (код свободного доступа) или P-код) от спутника до приемника. Фаза несущей частоты - представляет собой разницу между фазой, полученной со спутника и фазой приемника осциллятора во время измерения. Время измерений получено опосредованно из этих фаз измерения с использованием двух фаз несущего сигнала L1 (1575,42 МГц) и L2 (1227,60 МГц). Приемник должен не только фиксировать необходимое количество спутников, но и их геометрическое расположение, зависящее от ДОП-фактора (фактор потери точности) должно быть приемлемо. Чем меньше значение PDOP (фактор потери точности позиционирования), тем точнее геометрическое расположение спутников. На точность измерений GPS могут влиять различные ошибки, такие как проскальзывание цикла и многолучевая интерференция, которые могут ухудшить точность определения местоположения. Сегодня большинство из этих ошибок считаются управляемыми для большинства операций обследования.
Высокая точность системы GPS заключается в ее дифференциальном позиционировании. В одной точке позиционирования для определения геоцентрической позиции приемника, точность в метровом диапазоне. Однако, работая в дифференциальном режиме, GPS дает очень точную информацию о положении и скорости, когда используется наблюдения над фазой несущей сигнала. Точность определения местоположения в данном случае определяется на уровне сантиметра .
Координаты GPS всегда напрямую связаны с геоцентрической, наземной и декартовой системами координат, и могут быть легко преобразованы в широту, долготу и эллипсоидальную высоту [9]. Производство или модификация карт осуществляется с помощью какой-нибудь проекционной системы, например, такой как UTM, или локальной системой прямоугольных координат. Вертикальный контроль (ортометрическая высота), который ссылается на геоид, отличается от GPS данных, полученных на эллипсоидальной высоте. Важно, чтобы особое внимание уделялось правильному конвертированию эллипсоидальных высот в ортометрические эквиваленты на основе знаний локальных ундуляций геоида. Вертикальная точность, зависит от наличия и точности используемой модели геоида. Применяя систему GPS для составления карт, любая из этих проблем могут свести на нет весь процесс, и поэтому она требует строгих мер контроля качества для проведения и обеспечения успешной миссии. По мере совершенствования существующих приемников и эффективных методов обработки данных, большинство факторов, которые вызывают эти проблемы можно контролировать, минимизировать или избежать. Эти проблемы и пути их решения будут дополнительно рассмотрены в этой научной работе.
Необходимость в очень точных измерениях начала отсчета времени важны, потому что ошибки в отдельных точках начала отсчета будут влиять на точность определения контрольных точек, которые впоследствии будут использоваться для географической привязки и трансформации спутниковых снимков.
Теперь самое время остановиться на ошибках в GPS.
До сих пор мы производили расчеты данных, полученных с помощью системы GPS весьма абстрактно, как если бы все это происходило в вакууме. Но в реальном мире есть много факторов, которые могут отрицательно повлиять на качество прохождения сигнала GPS. Чтобы получить максимальную точность данных GPS, хороший приемник GPS должен учитывать широкий спектр возможных ошибок. Во-первых, одним из основных допущений, которыми мы пользуемся в настоящем исследовании не совсем верно. Пользователь рассчитывает расстояние до спутников путем измерения времени прохождения радиосигнала от космического аппарата до приёмника умноженным на скорость света. Но скорость света является постоянной только в вакууме. Так как сигнала GPS проходит через заряженные частицы в ионосфере, а затем через водяной пар в тропосфере скорость прохождения сигнала немного снижается, и это влечет за собой такую же ошибку, как ошибка часов приемника. Есть несколько способов минимизации такого рода погрешности. С одной стороны мы можем просчитать среднестатистическое отставание прохождения сигнала от спутника на приемник для среднестатистического дня при среднестатистических погодных условиях. Этот метод называется моделированием, он может быть эффективным, но, конечно, атмосферные условия редко бывают приближенные к среднестатистическим. Другой способ минимизации атмосферных ошибок является сравнение относительных скоростей двух различных сигналов. Это измерение "двойной частоты" является очень сложным и возможно только с передовыми приемниками.
Однако когда сигнал GPS попадает на землю, проблем не избежать и здесь. Сигнал может отражаться от различных наземных препятствий (таких как высокие здания или скалы) прежде, чем попасть на наш приемник. Это явление называется многолучевая интерференция, подобно отражениям, которые мы могли увидеть на экране телевизора. Хорошие приемники используют современные методы отказа сигнала для устранения этой проблемы. Вся концепция GPS основывается на идее о том, что сигнал GPS попадает прямо от спутника к приемнику. К сожалению, в реальности, сигнал также отражается от окружающих его объектов в окружающей действительности, и эти сигналы также попадают на приемник. В результате ряд сигналов поступают на приемник: первый сигнал прямой, а затем остальные. Данное явление создает беспорядочные сигналы. Если отраженные сигналы достаточно сильные, они могут создать помехи, тем самым приемник будет фиксировать ошибочные измерения. Современные приемники используют различные приемы обработки сигнала, чтобы убедиться, что они фиксируют только самые ранние прибывающие сигналы (которые являются прямым).
Хотя современные спутники очень сложны, они все равно допускают некоторые мелкие ошибки в системе. Атомные часы, которые они используют очень точные, но они не совершенны. Может возникнуть секунда расхождения, что приводит к искажению данных. И хотя позиции спутников находятся под постоянным контролем, но их не могут отслеживать каждую секунду. Так называемые эфемеридные ошибки могут возникнуть в момент, когда мониторинг не осуществляется.
Эфемеридные (или орбитальные) данные постоянно передаются спутниками. Приемники хранят в "альманахе" эти данные для всех спутников, и они обновляют эти альманахи, когда поступают новые данные. Как правило, эфемеридные данные обновляются ежечасно. Дифференциальная GPS могут устранить почти все ошибки. Основные геометрические характеристики сами по себе могут увеличить число этих ошибок по так называемому принципу "Геометрического фактора снижения точности" или GDOP. Это звучит сложно, но принцип довольно прост.
Количество спутников обычно больше, чем необходимо приемнику для определения положения, поэтому приемник выбирает несколько спутников, а остальные игнорирует. Если он выбирает спутники, которые расположены близко друг к другу в небе, перекрещивающиеся круги, которые определяют положение, будут формировать очень малый круг скольжения. Это влечет за собой увеличение площади "серой зоны" или допустимого предела ошибки вокруг позиции. Если он выбирает спутники, которые широко расположены друг от друга, круги перекрещиваются почти под прямым углом, что минимизирует возникновение ошибок. Хорошие приемники могут определить, у каких спутников GDOP будет низким.
Следующий волнующий нас вопрос: что такое дифференциальный GPS?
Для того, чтобы получить в режиме реального времени данные о местоположении с высокой степенью точности, используют Дифференциальную GPS. Дифференциальный метод позиционирования использует данные относительно положения точки на основе спутниковых сигналов, и используют поправку к данному местоположению. Эти поправки, различие между координатами, вычисленными при помощи спутниковых сигналов и уже известным значением, формируются базовым приемником, чье положение заранее известно, и передаются по каналам связи приемникам потребителя. Это и есть дифференциальной метод GPS.
Принцип работы DGPS прост. Если два приемника расположены близко друг к другу, около 100-200 км, у них будет такое же количество ошибок и их сигналы будут проходить сквозь те же атмосферные условия. Поэтому используют два приемника, один расположен в известной точке (его называют базовой станцией), и принимающий приемник (приемник-ровер). Базовый приемник хранит данные о местоположении в памяти или на компьютере, а приемник-ровер сохраняет данные, полученные с поля в бортовом запоминающем устройстве или на внешнем запоминающем устройстве. Компьютер сравнивает данные, полученные базовым приемником со спутника с фактическими, рассчитанными данными базового приемника и определяет масштаб ошибок. Когда данные, полученные с приемника-ровера, загружаются в компьютер, программное обеспечение вносит поправки к ним и корректирует данные приемника-ровера. Этот метод называется методом коррекции координат, который используется в полевых исследованиях данной научной работы. Этот метод, обеспечивая хорошую точность, имеет некоторые ограничения и недостатки:
1- Необходимо два приемника (следовательно увеличиваются затраты) или доступ к данным базовой станции в пределах 200 километров от приемника-ровера.
2- Этот метод не может передавать полученные данные в режиме реального времени.
3- Приемники и базовой станции, и приемника-ровера должны работать по одним и тем же спутникам, в противном случае данные будут некорректными.
4- И еще один фактор, который необходимо учитывать: что за каждый час, проведенный в поле для сбора данных, нужно потратить еще около часа на корректировку координат.
Еще один вопрос, который мы не можем не рассмотреть – это метод кодового соответствия.
Итак, метод кодового согласования соответствия помогает определить, сколько времени потребуется сигналам пройти от спутников к приемникам. Если время прохождения сигналов известно, соответствующие расстояния до спутников могут быть рассчитаны при помощи соответствующего уравнения. Если известно расстояние от одного спутника, в зоне действия от своего местоположения будет спроецирована сфера, на которой находится приемник. Если определяется зона действия двух спутников, в результате мы имеем две пересекающиеся сферы. Линия пересечения двух сфер есть окружность. Таким образом, две зоны действия от двух спутников формируют окружность. Теперь, если добавить зону действия для третьего спутника, будет сформирована дополнительные сфера, которая, когда пересечется с одной из двух сфер, сформирует еще одну окружность пересечения. Пересечение двух кругов дает две возможные точки для местоположения приемника. Использование "семени позиции", которая находится в нескольких сотнях километров от местоположения приемника, быстро устранит одну из этих двух точек.
Однако для того, чтобы получить измерения в реальном времени необходимо учитывать систематическую ошибку (известную как смещение) в часах и преломление волны, когда она проходит сквозь атмосферу Земли. В рассматриваемом примере смещение часов приемника одинаково для всех трех дальностей, так как один и тот же приемник измеряет каждую дальность. Применив данные о дальности четвертого спутника, смещение часов приемника может быть математически рассчитано. Такое решение позволяет приемникам иметь менее точные (и менее дорогие) часы.
Кроме упоминаемых выше, существует еще несколько источников ошибок, которые влияют на сигналы спутника. Из-за смещения часов приемников и спутников и других источников ошибок, наблюдаемая дальность от спутника до приемника не является истинной дальностью, и поэтому она называется псевдодальность.
Преломление существенно влияет на точность наших измерений.
Как известно, скорости электромагнитных волн изменяются, когда они проходят через различные виды сред с различными индексами преломления. Атмосфера, как правило, подразделяется на слои. Подслои атмосферы, которые имеют аналогичный состав и свойства известны как сферы. Пограничные слои между сферами называются паузами. Две сферы, которые оказывают наибольшее влияние на сигналы GPS, являются тропосфера и ионосфера. Тропосфера является самой нижней частью атмосферы, и, как известно, распространяется до 10-12 км в высоту. Тропопауза отделяет тропосферу от стратосферы. Стратосфера имеет высоту до 50 км. Комбинированное преломление (рефракция) в стратосфере, тропопаузе и тропосфере известно, как тропосферная рефракция (преломление).
В атмосфере существует еще несколько слоев с высотой выше 50 км. Но одним из наиболее интересным слоем для работы GPS является ионосфера, которая простирается от 50-1500 км над землей. Когда сигналы GPS проходят через ионосферу и тропосферу, они преломляются. Поэтому возникают ошибки GPS относительно дальности, как и временные ошибки, и это является одной из причин, почему измеряемые дальности называются псевдодальностями.
Ионосфера состоит главным образом из ионов - положительно заряженных атомов и молекул, свободных отрицательно заряженных электронов. Свободные электроны влияют на распространение электромагнитных волн. Число ионов в любой данный момент времени в ионосфере зависит от ультрафиолетового излучения Солнца. Солнечная вспышка может резко увеличить количество ионов в ионосфере, и поэтому может быть причиной для беспокойства при работе с GPS в периоды высокой солнечной активности, которые происходят каждые 11 лет.
Преимущество расположения спутников на высоте приблизительно 20200 км над поверхностью Земли заключается в том, что сигналы с одного спутника поступающие на два разных приемника, проходят через почти такую же атмосферу. Следовательно, атмосфера имеет аналогичное воздействие на сигналы, и это воздействие можно исключить с помощью математических методов.
Что такое кинематический метод GPS в режиме реального времени?
Методы, подобные DGPS, также могут быть использованы с измерениями по фазе несущей частоты сигнала для устранения ошибок. Этот метод называется кинематический метод (RTK) с помощью GPS исследований, в котором также необходимо одновременное использование двух или нескольких приемников. Сигналы должны быть одновременно собраны всеми приемниками, не менее с четырех общих спутников в течение всего процесса измерения. Кинематический метод GPS исследования показывает лучшие результаты при использовании двухчастотных приемников, однако одночастотные приемники вполне могут быть пригодны для данного метода. Этот метод помогает определить местоположение с точностью до нескольких сантиметров, что делает его необходимым для достижения целей в геодезических изыскания, картографии и наблюдениях.
Так как координаты базовой станции известны, с помощью кинематического метода (RTK) GPS съемки вычисляем поправки псевдодальности (PRC) с помощью компьютера. Теперь, когда поправки псевдодальности определены, они используются подвижными приемниками для корректировки своих псевдодальностей.
Датчик с постоянным сканированием
Датчик с постоянным сканированием основан на использовании приборов с зарядовой связью (ПЗС) для измерения энергии электромагнитного поля. Матрица ПЗС состоит из фоточувствительных полупроводниковых детекторов. Величина одного элемента составляет 5 микрон. Сегодня двумерные матрицы ПЗС широко используются в цифровых фотокамерах и видеокамерах. Матрицы ПЗС, используемые в области дистанционного измерения, являются более чувствительными и имеют большее разрешение. Первый спутниковый датчик, в котором использовалась эта технология, назывался SPOT-1.
Высокоразрешающая аппаратура видимого диапазона (HRV). В основу работы датчиков с высокой разрешающей способностью, таких как IKONOS и Orb View-3, положен принцип постоянного сканирования.
Датчик с постоянным сканированием за один раз записывает одну сплошную линию. Основным преимуществом данного вида датчика над другими является то, что каждая позиция (пиксель) в линии имеет свой собственный детектор. Это позволяет получить более длительный период измерений на определенной исследуемой территории, в результате чего возникает меньше шума при относительно стабильной геометрии. Так как матрица прибора с зарядовой связью создает изображение путем сканирования сплошных линий вдоль направления движения платформы, датчик с постоянным сканированием также называется датчиком с траекторным сканированием.
В датчиках с постоянным сканированием нет сканирующего зеркала, и поэтому они имеют более высокую степень надежности и более продолжительный срок службы, в отличие от их предшественников. Вот почему, наряду с отличными геометрическими свойствами, датчики с постоянным сканированием широко используются в спутниковых дистанционных измерениях.
Геометрические характеристики сканера вдоль полосы полета
Для каждой отдельной линии сканеры вдоль полосы полета имеют такое же геометрическое построение, что и на аэрофотоснимках, имеющие центральную проекцию. Благодаря центральной проекции изображения, полученные с помощью сканеров вдоль полосы полета, подвержены в меньшей степени геометрическим искажениям, нежели изображения, полученные со сканеров поперек полосы полета. В случае равнинной местности и ограниченной суммарной зоны обзора (FOV), масштаб такой же, как линия, полученная в результате равноотстоящих пикселей. Концепция индивидуального сектора обзора (IFOV) не может быть применена к сканерам вдоль полосы полета.
Большинство сканеров вдоль полосы полета имеют способность наблюдения, отличное от надира. В таком случае, сканер может быть направлен в районы, вправо или влево от траекторного сканирования в поперечном направлении, либо в направлении движения. Эта особенность имеет ряд преимуществ. Во-первых, сканер может быть использован для наблюдения территорий, которые не в точке надира спутника, что позволяет сократить время между последовательными наблюдениями (периоды между повторными замерами). Во-вторых, данный сканер может быть использован для съемки территории, которая не покрыта облаками в данный конкретный момент. И, наконец, наблюдение, отличное от надира используется для производства стереоизображений, [17]. При производстве стереопары изображений с использованием поперечного стереонаблюдения, необходимо второе изображение, полученное с другой орбиты. При использовании стереонаблюдения в направлении движения, второе изображение может быть сделано сразу же после первого изображения тем же сканером на той же орбите. Это означает, что изображения сделаны почти в то же самое время, в тех же условиях, например таких, как сезон, погода и растительная фенология. Применяя наблюдение отличное от надира, подобно перспективной аэрофототопографической съемке, масштаб изображения может изменяться и поэтому должен быть откорректирован.
Как в сканерах поперек полосы полета, так и в сканерах вдоль полосы полета происходит интегрирование по времени. Рассмотрим движущуюся платформу со сканером вдоль полосы полета. Каждый элемент прибора с линейкой ПЗС (CCD), измеряет энергию, связанную с небольшой территорией под платформой. С пространственной разрешающей способностью10м и скоростью хода 6,5 км/с, каждые 1,5 миллисекунды (10м / 6,5 км/с) зарегистрированная энергия (Вт) измеряется для определения DN-значения для всех пикселей вдоль линии.
Система Ikonos с высокой разрешающей способностью
Ikonos был первым коммерческим спутником с высокой разрешающей способностью, который был выведен на орбиту. Ikonos принадлежит американской компании Space imaging, специализирующейся на наблюдениях за земной поверхностью. Существуют и другие коммерческие спутники с высокой степенью разрешения, например, Orb View-3 "(запущен в 2003 году, принадлежит компании Orblmage), QuickBird (запущен в 2001 году, собственность компаниия Earth-Watch) и EROS-A1" (запущен в 2000 году, владелец спутника компании West Indian Space). Ikonos был запущен в сентябре 1999 года, а систематизированные данные начали поступать со спутника с марта 2000 года .
Оптический сканер, установленный на спутнике Ikonos , основан на принципе сканирования вдоль полосы полета и может одновременно принять панхроматические и многоспектральные изображения. Кроме того, сканер обладает высокой разрешающей способностью по спектру в следующих спектральных диапазонах: 1-метровых панхроматических (черно-белых) и в 4-метровых мультиспектральных изображениях, а также имеет высокое радиометрическое разрешение, используя 11-битное квантование. Ожидается, что в долгосрочной перспективе, 50% аэрофотосъемки будут заменены изображениями с высоким разрешением, полученными из космоса, и что цифровые аэрофотокамеры в значительной степени заменят существующую в настоящее время аэрофототопографическую съемку. Одна из первых задач для системы Ikonos - получить высокоразрешительные изображения всех крупных городов США. Ранее, возможности картирования и мониторинга городских районов из космоса, и не только в Америке, были весьма ограничены.
Данные, полученные с Ikonos, могут быть использованы для малого и среднего масштаба топографической съемки, а также не только для составления новых карт, а также для обновления существующих топографических карт, что и является целью данной научной работы.
Заключение
Преобразование данных является очень важным этапом для обновления карт. Без этого преобразования процесс обновления не может быть осуществлен должным образом, так как существует различие между данными карты и данными космических снимков.
Классификация супервизорных изображений является самой точной для топографических сведений, чем старые карты и спутниковые изображения. А так как разрешение полученных изображений и растров увеличивается, будет повышаться и точность классификации, следовательно обновленная карта будет точная.
Процесс обновления карт с топографическими сведениями слишком сложный, и он не может быть полностью автоматизирован. Существующие автоматизированные системы и инструменты дистанционного зондирования могут в значительной степени помочь человеку, но они не в состоянии заменить его.
Максимальный Классификатор Вероятности - наиболее часто используемый классификатор, чем какой-либо параметрический классификатор, и он наилучшим образом подходит для точной классификации. Поэтому мы можем предположить, что входные данные имеют нормальное распределение и они независимы, как показано при исследовании территории в городе Кербела.
Использование мультивременных изображений для индивидуализации информационных классов может помочь устранить путаницу в классификации.
Определение векторной пригодности данных для обновления топографических карт состоит в математическом вычислении топографических объектов, полученных из исходных данных, а также из спутниковых изображений.
Использование многоспектральных изображений Ikonose позволяет нам обновить карты больших и малых масштабов.
Для обновления одной карты с масштабом 1:50,000 нам необходимо иметь семи изображений, полученный со спутника Ikonos.
Литература
- C.Armenakis, CHANGE DETECTION METHODS FOR THE REVISION OF TOPOGRAPHIC DATABASES, Center for Topographic Information, Geometrics Canada, Natural Resources Canada.
- Christopher Joseph Pal, A Probabilistic Approach to Image Feature Extraction, Segmentation and Interpretation, M.Sc., Thesis, University of Waterloo.
- David Holland, Paul Marshall, UPDATING MAPS IN A WELL-MAPPED COUNTRY USING HIGH RESOLUTION SATELLITE IMAGERY, Ordnance Survey, Romsey Road, Southampton.
- . Ehab NABIL NASSIF, A Unified System of Transformation Parameters for Combining Different Geodetic Networks in Egypt.
- Floyd F. Sabins (2000), REMOT SENSING PRICIPLES AND INTERPRETATION, university of California.
- ITC Educational Textbooks Series (2004), Principles of Geographic Information System.
- J.Grodecki and G.Dial, IKONOS GEOMETRIC ACCURACY.
- . Manon Carignan and Guy Dumoulin, TOPOGRAPHIC MAPPING AT THE 1:100,000 SCALE, bureau E-304, Charlesbourg.
- Michael Kostiuk, MA Geography, USING REMOTE SENSING DATA TO DETECT SEA LEVEL CHANGE, Ontario, Canada.
- Mohamed H.D, Use of Satellite Imagery for Digital Map Production & Revision, Mcs. Thesis, 1999. University of Baghdad.
- R. Thomas, DIGITAL MAP UPDATING FROM SATELLITE IMAGERY, Ramonville Saint Agne Cedex, France(2005).
- Dr. Richard A. Snay and Dr. Tom?s Soler, Modern Terrestrial Reference Systems PART 3: WGS 84 and ITRS, PROFESSIONAL SURVEYOR March 2000.