
ондуляцій при використанні GPS
Резюме |Біографія
Введення
Системи висот
Метод Крігінга і Кокрігінга
Висновок
Література
На сьогоднішній день існує в Україну висотне обгрунтування через відсутність систематичних спостережень за ним методами високоточної нівеляції значно застаріло. Це викликано природним підніманням і опусканням земної поверхні, знищенням і порушенням пунктів у результаті техногенної діяльності. Відновлення мережі традиційними методами дуже дорогий процес. Все це визначає необхідність використання нових сучасних методів визначення висотного положення пунктів, які є як менш дорогими, так і вимагають менших витрат часу.
На сьогоднішній день головним завданням будь-яких вимірів, у тому числі геодезичних, є відповідність трьом головним вимогам:
-максимальна автоматизація
-мінімальна витрата матеріальних ресурсів і часу;
-Відповідність необхідної точності.
Традиційні методи вимірювань (вимірювання за допомогою традиційних геодезичних приладів) не можуть відповідати всім цим трьом вимогам одночасно.
На даний момент найбільш раціональним є визначення координат пунктів за допомогою GPS-технологій.
Розглянемо переваги:
1) використання лише одного приймача,
2) однорідна точність отриманих вимірювань;
3) висока оперативність проведення робіт;
4) одержувана точність задовольняє вимогам майже всіх видів топографічних робіт.
Точність геодезичних робіт в Україну визначається інструкцією по топографічній зйомці, на підставі якої, можна зробити висновок, що в геодезії требуетсяразлічная точність вимірювань, вона залежить від виду виконуваних робіт.
На сьогоднішній день існує проблема підвищення точності GPS-вимірів. Многотраекторность, різнорідність антен, і інші фактори змушують вчених усього світу боротися за усунення цих недоліків. Завдяки цьому, вже сьогодні за допомогою супутникового методу можна домогтися точності 2,5 см. Для більшості топографічних робіт така точність є прийнятної. [1]
Говорячи про висотному обгрунтуванні, слід в першу чергу розібратися в тому, що ми розуміємо під висотою в геодезії.
Заввишки точки називається відрізок прямовисній лінії від цієї точки до певної рівної поверхні, прийнятої на початок звіту висот. [3]
Як відомо, з GPS-вимірів визначаються еліпсоїдальної висоти (див. рис. 1 і рис. 2). еліпсоїдальної висотою деякої точки фізичної поверхні землі називається відрізок нормалі до еліпсоїда від його поверхні до точки земної поверхні, тобто це отстояния від поверхні еліпсоїда по нормалі. Еліпсоїд , у свою чергу, - це тіло, отримане обертанням еліпса навколо його малої осі.
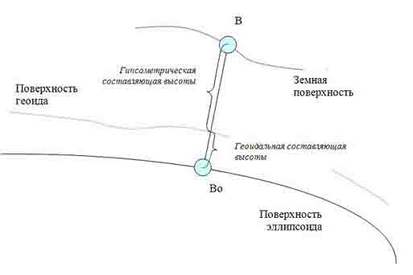
Рисунок 1 - Відлік висот
У геодезії використовуються нормальні висоти (див. рис. 2).
Нормальна висота точки - відстань даної точки від квазігеоїда по прямовисній лінії. Вони використовуються для більшості геодезичних робіт на території колишнього СНД. Нормальні висоти вказані в каталогах геодезичних пунктів і відображені на топографічних картах. Можуть бути визначені з результатів нівелювання, а також обчислені за геодезичними висот. [3]
Поняття квазігеоїда тісно пов'язано з поняттям геоїда.
Геоїд визначається як Еквіпотенціальна поверхню земного поля тяжкості (рівень поверхні), приблизно збігається з середнім рівнем вод Світового океану в невозмущенном стані і умовно продовжена під материками. Відмінність реального середнього рівня моря від геоїда може досягати 1 м. За визначенням еквіпотенційної поверхні, поверхня геоїда скрізь перпендикулярна прямовисній лінії, а додаткова поверхня, дуже близька до неї, і представляє собою фігуру реальної Землі -. квазігеоїда (див. рис.2). [3] В силу невизначеності фігури геоїда, квазігеоїда виконує роль допоміжної поверхні при вивченні фізичної поверхні Землі. Його фігура, на відміну від геоїда, однозначно визначається за результатами вимірювань, збігається з геоидом на території Світового океану і дуже близько підходить до нього на суші, відхиляючись не більше ніж на 2 метри у високих горах і на кілька сантиметрів на рівнинній місцевості.
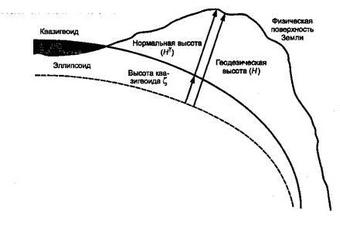
Рисунок 2 - Висоти в геодезії
Відлік нормальних висот прийнято вести від нуль-пункту Кронштадського футштока (ця система називається Балтійської нормальною системою висот).
Ясно, що нормальні і еліпсоїдальної висоти не збігаються.
Різниця між величинами еліпсоїдальної і нормальної висот називається ондуляціей .
Вона визначається:

h - еліпсоїдальної висота
N-нормальна висота
Необхідно розробити метод обліку ондуляцій (модель переходу), що дозволяє по знайденим з GPS-спостережень еліпсоїдальних висот отримувати нормальні висоти з максимальною точністю.
У цьому випадку визначення висот з GPS-спостережень може стати альтернативою геодезичного нівелювання.
Розробки моделей переходу вже існують у світовій практиці. У США такими розробками займалися Томас Х. Мейер, Даніель Р. Роман, Давид Б. Зілковська, в Ізраїлі це Я. Тучин, Г.Івен-Тзур, Г. Стейнберг та інші. В обох країнах були проведені програми зі створення висотної основи, завдяки якій відпадає необхідність визначати висоти нових і оновлювати висоти існуючих нівелірних реперів традиційними методами
Замість висотної основи у вигляді ієрархічної ГГС, була створена мережа постійних станцій. На цих станціях визначаються висоти як геометричним нівелюванням, там і за допомогою GPS. Станції рівномірно розподілені по території країни, дані на них весь час оновлюються, і вільні від помилок, викликаних антропогенним впливом. Отримані еліпсоїдальної висоти однакові по точності. Там, де потрібна вища точність вимірювань, пропонується використовувати локальні нівелірні мережі, створені традиційними методами. [2]
Якщо існує система точок, в яких відомі величини еліпсоїдальних і нормальних висот, то за формулою (1), ми можемо знайти ондуляцію в кожній точці. Накладаючи на дану систему точок поверхню, отримаємо деяку модель, яка буде називатися ондуляціонной моделлю. При її наявності, використовуючи методи інтерполяції Крігінга і Кокрігінга, ми зможемо визначити величину ондуляціі в кожній точці цієї поверхні.
Дана поверхня являє собою сітку квадратів, у вузлах якої визначені ондуляціі. Сітка може створюватися з різним кроком, що дає різні значення помилок визначення ондуляцій в вершинах квадрата. Вчені з Ізраїлю тестували сітки з кроком 4 км на 4 км, 1 км на 1 км, 0,5 км на 0,5 км, і визначили, що оптимальний крок сітки - 0,5 км на 0,5 км (. Див. мал 3), тому що отримується точність вимірювань залежна від величини відстані між вузлами сітки. Ондуляціонная поверхню в Ізраїлі створено на 684-х базових відмітках.
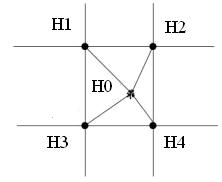
Рисунок 3 - Інтерполяція висоти всередині квадрата
Знаючи величини ондуляціі у вузлах квадрата по побудованій моделі можуть бути визначені ондуляціі в будь-якій довільній точці поверхні. Отримаємо її за формулою:

Метод Крігінга - це метод інтерполяції, який заснований на використанні методів математичної статистики. У його реалізації застосовується ідея регіоналізованих змінної, тобто змінної, яка змінюється від місця до місця з деякою видимої безперервністю, вона не може моделюватися тільки одним математичним рівнянням. Поверхня представляється у вигляді трьох незалежних величин. Перша - тренд, характеризує зміну поверхні в певному напрямку. Тренд (рис.4), як відомо, представляє собою довготривалу тенденцію зміни досліджуваного ряду. Далі передбачається, що є невеликі відхилення від загальної тенденції, на зразок маленьких піків і западин (приклад, піків і западин - см Рисунок 4 і 5.), Які є випадковими, але все ж зв'язаними один з одним просторово. Нарешті, є випадковий шум (яка на представленому малюнку позначається, як валуни). З кожною з трьох змінних треба оперувати окремо. Тренд оцінюється з використанням математичного рівняння, яке найбільш точно описує загальні зміни поверхні, багато в чому подібному поверхні тренда. [4]
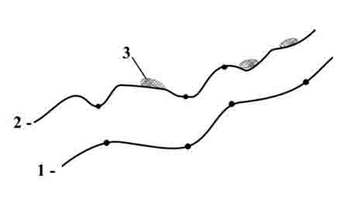
Рисунок 4 - Елементи Крігінга
1 - тренд
2 - випадкові, але просторово пов'язані висотні коливання,
3 - випадковий шум (валуни).
Стандартне відхилення крігінга взято як величина помилки моделі і реалізовано в моделі на тій же самій сітці 0,5 x 0,5 км, як величини ондуляцій. Проводилось безліч числових експериментів, щоб визначити параметри варіограмми. Кокрігінг дозволяє будувати поверхні карти з кількох наборам точок, що збільшує надійність і детальність результатів інтерполяції. Це потрібно для реалізації нашого алгоритму ще й тому, що модель постійно розширюється, число базових точок зростає, а значить додаються нові набори даних. Крім того, ця можливість додає даному методу інтерполяції додаткові можливості аналізу взаімокорреляціі даних, а тим самим і велику гнучкість. Тобто, вторинна мінлива використовується для прогнозування первинної. [5] Метод Крігінга використовується в програмних пакетах Geostatistical Analyst, Geode, Surfer, ArcView та інших. У даній роботі будуть застосовані програмні пакети Surfer 8, ArcView 3.1. Програмна реалізація буде здійснюватися в середовищі Delphi 7.0.
Щоб вирішити проблему розбіжності еліпсоїда і геоїда, їх різниця повинна бути розрахована на кожному пункті поверхні, де виконано вимірювання координат. Це стає здійсненним при наступних умовах:
- Встановлено надійний зв'язок між мережами GPS і нівелірних мережами;
- Збудовано точна модель геоїда;
- Створено математичні та програмні інструменти, щоб оцінити різниці еліпсоїда і геоїда на кожному пункті поверхні.
Таким чином, головна мета роботи - визначення найбільш раціонального метод знаходження висота.
Це пов'язане з наступними завданнями:
1) виконати аналіз систем висот, що використовуються в різних геодезичних роботах;
2) вивчити методи супутникових вимірів при визначенні висот;
3) вивчити методи побудови моделей поверхні з використанням інформаційних технологій;
4) вивчити теоретичні основи моделей і алгоритмів обліку ондуляцій;
5) розробити спосіб обліку ондуляцій.
Резюме |Біографія
Науковий керівник, доц, к.т.н..: Андоленко Світлана Степанівна
Резюме |Біографія
Реферат за темою випускної работи
Вступ
На сьогоднішній день існує в Україну висотне обгрунтування через відсутність систематичних спостережень за ним методами високоточної нівеляції значно застаріло. Це викликано природним підніманням і опусканням земної поверхні, знищенням і порушенням пунктів у результаті техногенної діяльності. Відновлення мережі традиційними методами дуже дорогий процес. Все це визначає необхідність використання нових сучасних методів визначення висотного положення пунктів, які є як менш дорогими, так і вимагають менших витрат часу.
На сьогоднішній день головним завданням будь-яких вимірів, у тому числі геодезичних, є відповідність трьом головним вимогам:
Системи висот
Говорячи про висотному обгрунтуванні, слід в першу чергу розібратися в тому, що ми розуміємо під висотою в геодезії.
Заввишки точки називається відрізок прямовисній лінії від цієї точки до певної рівної поверхні, прийнятої на початок звіту висот. [3]
Як відомо, з GPS-вимірів визначаються еліпсоїдальної висоти (див. рис. 1 і рис. 2). еліпсоїдальної висотою деякої точки фізичної поверхні землі називається відрізок нормалі до еліпсоїда від його поверхні до точки земної поверхні, тобто це отстояния від поверхні еліпсоїда по нормалі. Еліпсоїд , у свою чергу, - це тіло, отримане обертанням еліпса навколо його малої осі.
Знаючи величини ондуляціі у вузлах квадрата по побудованій моделі можуть бути визначені ондуляціі в будь-якій довільній точці поверхні. Отримаємо її за формулою:
Метод Крігінга і Кокрігінга
Метод Крігінга - це метод інтерполяції, який заснований на використанні методів математичної статистики. У його реалізації застосовується ідея регіоналізованих змінної, тобто змінної, яка змінюється від місця до місця з деякою видимої безперервністю, вона не може моделюватися тільки одним математичним рівнянням. Поверхня представляється у вигляді трьох незалежних величин. Перша - тренд, характеризує зміну поверхні в певному напрямку. Тренд (рис.4), як відомо, представляє собою довготривалу тенденцію зміни досліджуваного ряду. Далі передбачається, що є невеликі відхилення від загальної тенденції, на зразок маленьких піків і западин (приклад, піків і западин - см Рисунок 4 і 5.), Які є випадковими, але все ж зв'язаними один з одним просторово. Нарешті, є випадковий шум (яка на представленому малюнку позначається, як валуни). З кожною з трьох змінних треба оперувати окремо. Тренд оцінюється з використанням математичного рівняння, яке найбільш точно описує загальні зміни поверхні, багато в чому подібному поверхні тренда. [4]
Стандартне відхилення крігінга взято як величина помилки моделі і реалізовано в моделі на тій же самій сітці 0,5 x 0,5 км, як величини ондуляцій. Проводилось безліч числових експериментів, щоб визначити параметри варіограмми. Кокрігінг дозволяє будувати поверхні карти з кількох наборам точок, що збільшує надійність і детальність результатів інтерполяції. Це потрібно для реалізації нашого алгоритму ще й тому, що модель постійно розширюється, число базових точок зростає, а значить додаються нові набори даних. Крім того, ця можливість додає даному методу інтерполяції додаткові можливості аналізу взаімокорреляціі даних, а тим самим і велику гнучкість. Тобто, вторинна мінлива використовується для прогнозування первинної. [5] Метод Крігінга використовується в програмних пакетах Geostatistical Analyst, Geode, Surfer, ArcView та інших. У даній роботі будуть застосовані програмні пакети Surfer 8, ArcView 3.1. Програмна реалізація буде здійснюватися в середовищі Delphi 7.0.
Висновок
Щоб вирішити проблему розбіжності еліпсоїда і геоїда, їх різниця повинна бути розрахована на кожному пункті поверхні, де виконано вимірювання координат. Це стає здійсненним при наступних умовах:
Література
- Гершон Стейнберг і Яків Тучин «Два роки Досвід роботи з ізраїльською офіційної моделі геоїда хвилями" //TS 3C - GEOID - Моделювання, лютий 2009 року.
- Яків Тучин, "Розвиток геоїда-Еліпсоїд Кольороподіл моделі в Ізраїлі" //Формування зміни XXIII Конгрес Рис Мюнхені, Німеччина, 8-13 жовтня 2006
- Геодезія. Частина перша. Друге видання, віправлене та ДОПОВНЕННЯ. (За загально редакцією професора, д.т.н. Могильного С.Г. и професора Войтенко С.П.). - Донецьк, 2003 р. - 458 с.
- Антон Сухинов "Крайгинг интерполяция" [Электронный ресурс] — 2011. Режим доступа http://iproc.ru/drafts/kriging/
- "Координатное пространство" [Электронный ресурс]. — 2010. Режим доступа http://www.metclad.ru/collection/koordinatnoe_prostranstvo/71/
- Силкин К.Ю. Геоинформационная система Golden Software Surfer 8: Учебно-методическое пособие для вузов. — Воронеж: Изд-во ВГУ, 2008. — 66 с.
- Поклад Г.Г. Геодезия: учебное пособие для вузов / Г.Г. Поклад, С.П. Гриднев. — М.: Академический Проект, 2007. — 592 с.
Резюме |Біографія