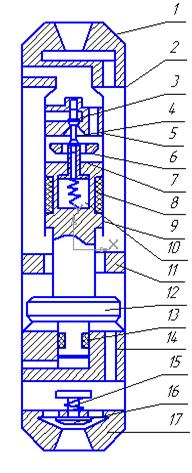
Рис.1.1 - Гідровібратор конструкції ДПІ

1.1. Гідровібратор конструкції ДПІ
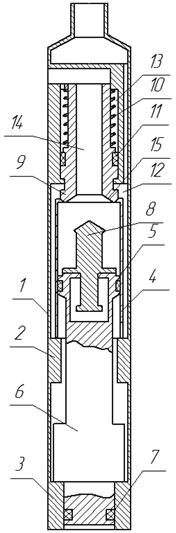
1.2 Гідроударник з гідравлічною перестановкою клапанної групи
2. Опис розробленого механізму
3. Уточнення методики розрахунку
Актуальність магістерської роботи
Буріння свердловин на полях вугільних шахт в Донбасі проводиться в більшості в ускладнених умовах, які обумовлені наявністю зон поглинань як природного так і техногенного походження. Внаслідок несвоєчасного виявлення поглинань виникає зашламування вибою свердловини і, як наслідок, – прихвати бурового інструмента шламом. Практика показує, що досить ефективними засобами ліквідації прихватів шламом є гідроударні механізми, що збуджують коливання прихваченого снаряду, які і призводить до його вивільнення. Існу-ючі гідроударні механізми мають ряд недоліків, обумовлених витратами енергії при переста-новці клапанної групи і гальмуванням бойка на вільному ході. Це зменшує їх ефективність при виконанні аварійних робіт.
Таким чином, для практики буріння свердловин в умовах Донбасу вельми актуальною є розробка гідроударного механізму з підвищеними енергетичними показниками, який можна було б застосовувати як для ліквідації прихватів бурового снаряду в розвідувальних свердловинах. Це дозволить підвищити техніко-економічні показники аварійних робіт, а, отже, і буріння свердловини в цілому. В зв’язку з цим робота по вдосконаленню гідроударника для ліквідації прихватів в свердловинах є актуальною.
Мета і завдання магістерської роботи
Мета роботи – вдосконалення методики розрахунку гідроударника для ліквідації прихватів з гідравлічною перестановкою клапанної групи, уточнення закономірностей його роботи, розробка практичної конструкції і технології його застосування.
Задачі дослідження:
1. Аналіз сучасного стану гідроударних механізмів для ліквідації прихватів в свердловинах.
2. Аналіз існуючих методик розрахунків гідроударних механізмів для ліквідації прихватів і буріння свердловин.
3. Вдосконалення методики розрахунку гідроударного механізму з урахуванням особливостей його робочого циклу.
4. Вдосконалення конструкції гідроударника для ліквідації прихватів і технології його застосування.
Можливі результати, які очікуються при виконанні роботи, їх новизна та значення.
Нові результати:
– Вдосконалена методика розрахунку гідроударного механізму для ліквідації прихватів в свердловинах.
– Конструкція вдосконаленого гідроударного механізму та технологія його застосування.
Значення роботи полягає в розробці методики розрахунку гідроударного механізму з гідравлічною перестановкою клапанної групи і обґрунтуванні конструктивних параметрів і технології застосування.
Запланована апробація результатів (участь в конференціях, подача робіт на конкурс, публі-кації, подача заявок на винахід тощо)
Участь у республіканській науково-технічній конференції студентів «Буріння», Форумі студентів-буровиків. Подача роботи на конкурс студентських науково-дослідних робіт.
В даний час розроблено досить багато пристроїв для ліквідації прихватів бурового інструменту в свердловині. В основному це ударні механізми.
У залежності від розташування механізму щодо елемента, якому передаються коливання розрізняють поверхневі й заглибні ударні механізми. При глибинах свердловини більше 100 м, слід віддавати перевагу заглибним механізмам[5].
За типом приводу всі механізми діляться на механічні, електричні, електромеханічні, гідравлічні, електрогідравлічні, пневматичні, вакуумно-компресійні, електромагнітні та магнітострикційні[3].
Найбільш раціональними видами приводу для умов розвідувального буріння вважаються гідравлічний та механічний, перетворення енергії в яких не складне, і вони не вимагають додаткового обладнання на буровій[8].
Однак для генерації високочастотних ударів більш прийнятний гідравлічний привід[1]. У даній роботі проектується гідроударний механізм для ліквідації прихватів. Цей тип механізмів найбільш численний і різноманітний за своїми конструктивними особливостями, схемою виконання та системою перетворення енергії потоку рідини у вимушені коливання[10].
Гідроударники за принципом дії поділяються на ГУ одинарної і подвійного дії. Гідроударники одинарної дії в свою чергу діляться на гідроударники з прямим активним ходом бойка(удар завдається за рахунок тиску рідини, повернення бойка - за допомогою пружини) і зі зворотнім активним ходом бойка(удар завдається за рахунок сили стиснутої пружини, повернення бойка - за рахунок тиску промивальної рідини )[2].
У гідроударника подвійної дії рух бойка в обох напрямках забезпечується рідиною, клапанна група контролює дві робочі порожнини гідроударника. Виділяють гідроударники з диференціальним поршнем (гідроударник диференціальної дії). Вони найбільш широко застосовуються в бурінні через більш простої конструкції, чим у ГУ подвійної дії, і більш високого ККД, чим у ГУ одинарної дії[4].
Гідроударник застосовується таким чином: у разі виникнення аварійної ситуації проводиться від'єднання бурильної колони від прихопленого колонкового снаряду, для чого рекомендується включати до складу снаряда відсоєдінітельний перехідник. Після від'єднання і підйому колони труб на поверхню, попередньо зібраний пристрій, спускається на колоні бурильних труб до місця прихвата і виробляється приєднання колони труб до прихопленого інструменту. Після приєднання подається промивна рідина в колону бурильних труб і дається натяг колони, і виробляється ліквідація аварії[7].
Розглянемо ГУ механізми з гідравлічним приводом диференціальної дії.
Гідроударник (рис.1.1) може включатися до складу снаряда у процесі проходки свердловини або спускатися в зону прихвата у разі виникнення аварії[9].
Гідровібратор складається з перехідника 1, корпуса 2, впускного клапана 3 і випускного - 6, штовхача 4, клапанної коробки 5, хвостовика 7 випускного клапана, поршня 8, циліндра 9, пружини 10, верхній ковадли 11 і нижній - 14, бойка 12 з хвостовиком 13, пружини 15, пускового клапана 16, нижнього перехідника 17.
Він працює таким чином. У корпусі 2 у вихідній позиції бойок 12 з хвостовиком 13 під дією ваги займає нижнє крайнє положення, тому впускний клапан 3, розташований в клапанної коробці 5, закритий, а випускний 6 - відкритий. При подачі насосом промивної рідини вона через канали перехідника 1 надходить у нижню порожнину циліндра 9 і піднімає поршень8 разом з бойком 12 вгору. У міру підйому поршня 8 пружина 10 стискається, так як блок клапанів утримується у вихідній позиції внаслідок тиску рідини на впускний клапан 3. У верхньому положенні поршень 8 завдає удару по клапану 6, що викликає перестановку клапанів: впускний клапан 3, пов'язаний з випускним клапаном 6 штовхачем 4, відкриється, а випускний клапан 6 - закриється. У момент перестановки клапанів бойок 12 завдасть удар по верхній ковадлі 11. При такому розташуванні клапанів промивна рідина надходить і у верхню порожнину циліндра 9. Оскільки робоча площа поршня зверху більше, ніж знизу, то поршень-бойок переміститься вниз, при цьому клапанний блок утримується у верхньому положенні за рахунок тиску промивальної рідини на випускний клапан 6. Поршень 8, переміщаючись вниз, захопить хвостовик 7 клапана 6 і перемістить клапанний блок у вихідне положення. Одночасно бойок 12 завдасть удар по нижній ковадлі 14. Удари по верхній і нижній ковадлах передаються по прихопленому снаряду, збуджуючи в ньому вимушені коливання. При включенні гідравлічного вібратора до складу снаряда необхідно, щоб пусковий клапан 16 був відкритий і забезпечував прохід промивної рідини на забій свердловини в процесі її поглиблення, що досягається вибором жорсткості пружини 15 і регулюванням її попереднього натягу. Закриття клапана 16 при запуску машини відбудеться унаслідок підвищення витрати промивної рідини.
Гідроударник має такі переваги:
- з метою підвищення надійності роботи за рахунок запобігання впускного клапана від швидкісного напору промивної рідини
- гарантується повна синхронізація роботи клапанів, підвищується ККД і знижується витрата промивальної рідини на привід механізму за рахунок незначного витоку і високого коефіцієнта використання рідини (0,8-0,9).
- досягнута простота конструкції, можливість виготовлення у будь-якій механічній майстерні експедиції та об'єднань, легкість запуску та експлуатація.
Гідроударник (рис.1.2) складається з корпусу 1, до якого приєднана верхня ковадла 2, нижня ковадла 3 та клапанна коробка,у якій розміщений впускний клапан 9. Клапан 9 подпружінен щодо клапанної коробки пружиною 13, а також має центральний канал 8, у якому розташований випускний клапан 7, підпружинений пружиною 10. Поршень 5 має можливість взаємодіяти з випускним клапанном 7 за допомогою хвостовика 20. При русі поршня - бойка 6 завдає ударів по верхній 2 і нижній 3 ковадлах по черзі[6].
У вихідному положенні бойок 6 знаходиться в крайньому нижньому положенні в безпосередньому контакті з нижньою ковадлою 3. Впускний клапан 9 закритий, тобто знаходиться на посадковому місці 18. Випускний клапан 7 перебуває в крайньому нижньому положенні щодо впускного клапана 9. Робоча рідина через канал у перехіднику, через нагнітальний канал 15 надходить в зазор між корпусом 1 і циліндром 4 і через отвори в циліндрі 4 надходить під поршень 5. При цьому поршень 5 починає рухатися вгору під дією сили обумовленої тиском робочої рідини.
Після того, як бойок 6, рухомий поршнем 5, пройде відстань, яке менше ходу бойка на невелику (близько 2 мм) величину, випускний клапан 7 перекриває канал 19 в впускному клапані 9, який відкривається, тобто піднімається з посадкового місця 18, і робоча рідина надходить як над так і під поршень 5. Під дією сил інерції бойок 6 продовжує рух і завдає удар по верхній ковадлі 2. Оскільки площа поршня 5 більше різниці площ поршня 5 і штока, то поршень 5 починає рухатися вниз, при цьому з-за можливості вільного відносного руху випускного клапана 7 по відношенню до поршня 5, випускний клапан залишається закритим.
Після того, як бойок 6 пройде відстань, яке менше ходу бойка на невелику величину, хвостовик 20 зриває випускний клапан 7, канал 19 відкривається і впускний клапан 9, за рахунок дії пружини 13, закривається. Під дією сил інерції бойок 6 продовжує рух і завдає удар по нижній ковадлі 3. Потім цикл роботи повторюється.
Перевагою даного механізму є:
- спрощення взаємозв'язку випускного клапана і бойка, а також зменшення розмірів і як наслідок маси, випускного клапана що призведе до більш стабільної роботи механізму та зниження витрат енергії на перестановку клапанів.
- даний спосіб взаємодії випускного клапана і поршня (з'єднання за допомогою пальця) дозволяє проводити заміну випускного клапана з найменшими витратами часу.
Недоліком є те, що при малих діаметрах відбуваються гідравлічні опори через розміщення у впускному клапані випускного клапана.
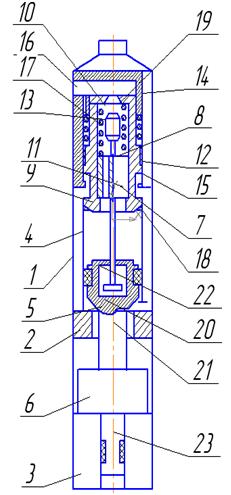
На кафедрі ТТГР була запропонована конструкція гідроударника О. Я. Тодера для ліквідації прихватів (рис.2.1), в якому при створенні конструкції малого діаметра гідроударника опір у клапанної групі зведено до мінімального.
Гідроударник зкладається з корпусу 1, з верхньої 2 та нижньої 3 ковадлами, циліндр 4, поршень 5, розміщений у циліндрі 4 і звязаний з бойком 6 і штоком 7, випускний клапан 8, встановлений в бойку 6, впускний клапан 9 з пружиною 10 і ущільненням 11, розташований у верхній частині циліндра 4. Ущільнення 11 впускного клапана 9 утворює порожнини високого 12 і низького 13 тиску. Впускний клапан 9 має наскрізний канал 14, і два посадочних місця, по зовнішній поверхні, причому зовнішнє посадочне місце впускного клапана 9 взаємодіє з верхньою частиною циліндра 4, а внутрішнє посадочне місце з випускним клапаном 8.
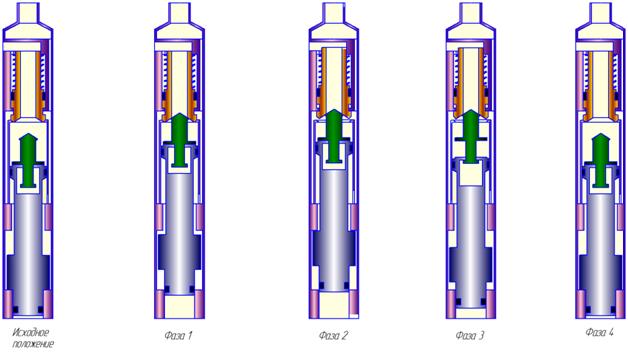
Гідроударник працює наступним чином. У вихідному положенні бойок знаходиться в крайньому нижньому положенні. Робоча рідина поступає під поршень, і бойок починає рух вгору. При цьому рідина з надпоршневої порожнини циліндра витісняється в свердловину. Випускний клапан рухається вгору спільно з бойком до взаємодії з сідлом на внутрішній поверхні впускного клапана, перекриваючи в ньому вихлопний канал. За рахунок взаємодії з випускним клапаном впускний клапан відривається від верхньої частини циліндра. У утвориний зазор між верхньою частиною циліндра і впускним клапаном надходить рідина з порожнини високого тиску. Клапани спільно переміщуються вгору на величину ходу впускного клапана, стискаючи пружину. Завдяки тому, що площа тарілки впускного клапана практично дорівнює площі ущільнення, то для його відкриття і переміщення вгору потрібна невелика сила, достатня для стиснення пружини. Бойок завдає удару по верхній ковадлі (рис.2.2).
Після того, як клапани перемістилися вгору, рідина надходить як під поршень, так і в надпоршневую порожнину циліндра. За рахунок того, що робоча площа поршня зверху більше ніж знизу, то бойок починає рух вниз. При цьому клапани утримуються у верхньому положенні за рахунок тиску рідини. Після того як бойок захопить хвостовик випускного клапана і відірве його від впускного клапана, відкривається вихлопний канал і тиск у системі падає. Бойок проходить відстань, що залишилася до нижньої ковадли за інерцією і завдає по ній удару. Випускний клапан повертається в нижнє положення, а впускний клапан переміщається пружиною вниз до взаємодії з верхньою частиною циліндра. Надходження рідини в порожнину над поршнем припиняється, і робочий цикл повторюється.

Переваги розроблювального пристрою:
- Зниження втрат швидкості бойка на вільному ході при перестановці клапанів, як за рахунок зменшення величини вільного ходу, так і за рахунок зниження гідравлічного опору клапанної групи, так як площа впускного клапана не залежить від співвідношення площ поршня і штока і може дорівнювати площі циліндра.
- Підвищення надійності роботи гідроударника за рахунок полегшення його запуску, так як гідравлічна перестановка клапанів не вимагає спільного переміщення бойка і клапанів.
- Впровадження гідроударника здійснюється через відсутність розрахунків.
У розрахунках врахована особливість робочого циклу - збільшений час на перестановку клапанів при ході бойка вгору: , тому була запропонована уточнена формула
, тому була запропонована уточнена формула 
де S2 - вільний хід бойка при русі вгору;  - коефіцієнт втрат швидкості бойка на вільному ході; S - робочий хід бойка, Y-безрозмірний параметр, t1 - час робочого ходу бойка,
- коефіцієнт втрат швидкості бойка на вільному ході; S - робочий хід бойка, Y-безрозмірний параметр, t1 - час робочого ходу бойка, - хід клапана,
- хід клапана,  - площа клапана,Q - витрата рідини.
- площа клапана,Q - витрата рідини.
Уточнена формула дає збільшення часу перестановки клапанів на 50%, в порівнянні з результатом за формулою
При ході бойка вгору буде витрачаться більше часу, ніж при ході бойка вниз. Це обумовлено тим, що при перестановці клапанів частина рідини буде витрачаться на їх перестановку, а також той обсяг, який буде звільнений при перестановці, заповнюється рідиною і тиск діє на клапанну групу.
За допомогою розробленої програми Delphi пораховані параметри роботи гідроударника: ККД, витрати потужності, перепад тиску, швидкість руху бойка, частота ударів, енергія одиничного удару.
У процесі написання магістерської роботи планується удосконалення конструкції гідроударника подвійного диференціальної дії, яка має просту конструкцію, менші втрати енергії при перестановці клапанів і на вільному ході.
Розробляється методика розрахунку гідроударного механізму з гідравлічною перестановкою клапанної групи, обгрунтована конструктивні параметри та технології застосування.
У подальніх дослідженнях планується уточнення методики розрахунку протікання динамічних процесів в буровому снаряді при ліквідації прихватів у свердловині.
Коломоец А.В. Предупреждение и ликвидация аварий в разведочном бурении. – М.:Недра, 1985, –224 с.
Неудачин Г.И., Квашин Е.В. Основные вопросы работы гидроударных буровых механизмов дифференциального действия // Сб. Совершенствование техники и технологии бурения скважин на твердые полезные ископаемые. – Вып.12,- Свердловск,1989.-с.73-78.
Калиниченко О.И., Комарь П.Л. Породоразрушающий и металлообрабатывающий инструмент – техника и технология его изготовления и применения. – Сборник статей. Вып.12, - Киев, 2009, с. 44.
Пустовойтенко И.П. Предупреждение и ликвидация аварий и осложнений в бурении. – М.:Недра, 1997.-238с.
Пустовойтенко И.П. Предупреждение и ликвидация аварий и осложнений в бурении. – М.:Недра, 1988.-279с.
Калиниченко О.И., Русанов В.А., Рязанов А.Н., Методика проектирования конструктивных и рабочих параметров забойных гидроударных машин. // В сб. «Совершенствование техники и технологии бурения скважин на твердые полезные ископаемые». – Екатеринбург: УГИ, 1993. – с. 97 – 102.
Самотой А.К. Предупреждение и ликвидация прихватов труб при бурении скважин. – М.:Недра, 1979.-182с.
Самотой А.К. Прихваты колонн при бурении скважин. М.:Недра 1984. – 204с.
Описания изобретений по классам E21B 31/113, E02D 7/10 за 1991-2001 гг.
Калиниченко О.И., Русанов В.А., Каракозов А.А. Hammer and Hammer – vibration Mechanism for Liquidation of Sticking. // Journal of Changchung University of Earth Sciences, 1993. - pp.137-139.