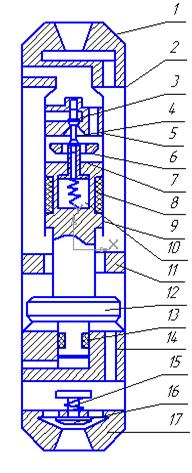
Рис 1.1 Гидровибратор конструкции ДПИ

1.1 Гидровибратор конструкции ДПИ
1.2 Гидроударник с гидравлической перестановкой клапанной группы
2. Описание разработанного механизма
3. Уточнение методики расчетов
Актуальность магистерской работы
Бурение скважин на полях угольных шахт в Донбассе проводится в большинстве случаев в осложненных условиях, которые обусловлены наличием зон поглощений, как природного, так и техногенного происхождения. Вследствие несвоевременного выявления поглощений возникает зашламование забоя скважины и, как следствие, — прихваты бурового инструмента шламом. Практика показывает, что достаточно эффективными средствами ликвидации прихватов шламом являются гидроударные механизмы, возбуждающие колебания прихваченого снаряда, которые и приводят к его высвобождению.
Существующие гидроударные механизмы имеют ряд недостатков, обусловленных затратами энергии при перестановке клапанной группы и торможением бойка на свободном ходу. Это уменьшает их энергетические параметры, а следовательно, и эффективность при выполнении аварийных работ.
Таким образом, для практики бурения скважин в условиях Донбасса весьма актуальной является разработка гидроударного механизма с повышенными энергетическими показателями для ликвидации прихватов бурового снаряда в разведочных скважинах. Это позволит повысить технико-экономические показатели аварийных работ и бурения скважины в целом.
Цель и задачи магистерской работы
Цель работы — совершенствование методики расчета гидроударника для ликвидации прихватов с гидравлической перестановкой клапанной группы, уточнение закономерностей его работы, разработка практической конструкции и технологии его применения.
Задачи исследования:
1. Анализ современного состояния гидроударных механизмов для ликвидации прихватов в скважинах.
2. Анализ существующих методик расчетов гидроударных механизмов для ликвидации прихватов и бурения скважин.
3. Совершенствование методики расчета гидроударного механизма с учетом особенностей его рабочего цикла.
4. Совершенствование конструкции гидроударника для ликвидации прихватов и технологии его применения.
Возможные результаты, которые ожидаются при выполнении работы, их новизна и значение
Новые результаты:
- Усовершенствованная методика расчета гидроударного механизма для ликвидации прихватов с гидравлической перестановкой клапанной группы в скважинах.
- Конструкция усовершенствованного гидроударного механизма и технология его применения при ликвидации прихватов.
Значение работы заключается в разработке методики расчета гидроударного механизма с гидравлической перестановкой клапанной группы и обосновании конструктивных параметров и технологии применения.
Запланирована апробация результатов (участие в конференциях, подача работ на конкурс, публикацию, подача заявок на изобретение и т.д.)
Участие во Всеукраинская научно-технической конференции студентов «Бурение», Форуме студентов-буровиков. Подача работы на конкурс студенческих научно-исследовательских работ.
В настоящее время разработано достаточно много устройств для ликвидации прихватов бурового инструмента в скважине. В основном это ударные и вибрационные механизмы.
В зависимости от расположения механизма относительно элемента, которому передаются колебания, различают поверхностные и погружные механизмы. При глубинах скважины свыше100 м, следует отдавать предпочтение погружным механизмам[5].
По типу привода все механизмы делятся на механические, электрические, электромеханические, гидравлические, электрогидравлические, пневматические, вакуумно-компрессионные, электромагнитные и магнитострикционные[3].
Наиболее рациональными видами привода для условий разведочного бурения считаются гидравлический и механический , преобразование энергии в которых не сложное, и они не требуют дополнительного оборудования на буровой[8].
Однако для генерации высокочастотных ударов более приемлем гидравлический привод [1]. В данной работе проектируется гидроударный механизм для ликвидации прихватов. Этот тип механизмов наиболее многочислен и разнообразен по своим конструктивным особенностям, схемам выполнения и системам преобразования энергии потока жидкости в вынужденные колебания.
Гидроударники по принципу действия подразделяются на ГУ одинарного и двойного действия. Гидроударники одинарного действия в свою очередь делятся на гидроударники с прямым активным ходом бойка (удар наносится за счет давления жидкости, возврат бойка — при помощи пружины) и с обратным активным ходом бойка (удар наносится за счет силы сжатой пружины, возврат бойка – за счет давления промывочной жидкости)[2].
В гидроударниках двойного действия движения бойка в обоих направлениях обеспечивается жидкостью, клапанная группа контролирует две рабочие полости гидроударника. Известные конструкции не нашли применения, так как не предназначены для работы на зашламованной жидкости. Среди гидроударников двойного действия выделяют ГУ с дифференциальным поршнем (гидроударники дифференциального действия). Они наиболее широко применяются в бурении из-за более простой конструкции, чем у ГУ двойного действия, и более высокого КПД, чем у ГУ одинарного действия[4].
Гидроударник применяется таким образом: в случае возникновения аварийной ситуации производится отсоединение бурильной колонны от прихваченного снаряда. После подъема колонны труб на поверхность устройство спускается к месту прихвата и производится его присоединение к прихваченному инструменту. Затем дается натяжение колонны, в нее подается промывочная жидкость и гидроударник включается в работу. Работы ведутся до освобождения прихваченного снаряда[7].
Рассмотрим гидроударные механизмы с гидравлическим приводом дифференциального действия.
Гидроударник (рис 1.1) может включаться в состав снаряда в процессе проходки скважины или спускаться в зону прихвата в случае возникновения аварии[9].
Он состоит из переходника 1, корпуса 2, впускного клапана 3 и выпускного - 6, толкателя 4, клапанной коробки 5, хвостовика 7 выпускного клапана, поршня 8, цилиндра 9, пружины 10, верхней наковальни 11 и нижней – 14, бойка 12 с хвостовиком 13, пружины 15 пускового клапана 16, нижнего переходника 17.
Гидроударник работает следующим образом. В корпусе 2 в исходной позиции боек 12 с хвостовиком 13 под действием веса занимает нижнее крайнее положение, поэтому впускной клапан 3, расположенный в клапанной коробке 5, закрыт, а выпускной 6 – открыт. При подаче насосом промывочной жидкости она через каналы переходника 1 поступает в нижнюю полость цилиндра 9 и поднимает поршень8 вместе с бойком 12 вверх. По мере подъема поршня 8, пружина 10 сжимается, так как блок клапанов удерживается в исходной позиции вследствие давления жидкости на впускной клапан 3. В верхнем положении поршень 8 наносит удар по клапану 6, что вызывает перестановку клапанов: впускной клапан 3, связанный с выпускным клапаном 6 толкателем 4, откроется, а выпускной клапан 6 – закроется. В момент перестановки клапанов боек 12 нанесет удар по верхней наковальне 11. При таком расположении клапанов промывочная жидкость поступает и в верхнюю полость цилиндра 9. Поскольку рабочая площадь поршня сверху больше, чем снизу, то поршень-боек устремится вниз, при этом клапанный блок удерживается в верхнем положении за счет давления промывочной жидкости на выпускной клапан 6. Поршень 8, перемещаясь вниз, захватит хвостовик 7 клапана 6 и переместит клапанный блок в исходное положение. Одновременно боек 12 нанесет удар по нижней наковальне 14. Удары по верхней и нижней наковальням передаются прихваченному снаряду, возбуждая в нем вынужденные колебания. При включении гидроударника в состав снаряда необходимо, чтобы пусковой клапан 16 был открыт и обеспечивал проход промывочной жидкости на забой скважины в процессе её углубления, что достигается выбором жесткости пружины 15 и регулированием ее предварительного натяжения. Закрытие клапана 16 при запуске машины произойдет вследствие повышения расхода промывочной жидкости.
Гидроударник имеет следующие преимущества.
- с целью повышения надежности работы за счет предохранения впускного клапана от скоростного напора промывочной жидкости;
- гарантируется полная синхронизация работы клапанов, повышается КПД и снижается расход промывочной жидкости на привод механизма за счет малых утечек и высокого коэффициента использования жидкости (0,8-0,9);
- достигнута простота конструкции, возможность изготовления в любой механической мастерской экспедиций и объединений, легкость запуска и эксплуатации.
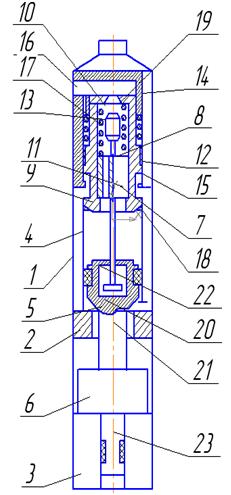
Гидроударник (рис.1.2) состоит из корпуса 1, к которому присоединена верхняя наковальня 2, нижняя наковальня 3 и клапанная коробка, в которой размещен впускной клапан 9. Клапан 9 подпружинен относительно клапанной коробки пружиной 13, а также имеет центральный канал 8, в котором расположен выпускной клапан 7, подпружиненый пружиной 10. Поршень 5 имеет возможность взаимодействовать с выпускным клапанном 7 посредством хвостовика 20. При движении поршня, боек 6 наносит удары по верхней 2 и нижней 3 наковальням поочередно[6].
В исходном положении боек 6 находится в крайнем нижнем положении в непосредственном контакте с нижней наковальней 3. Впускной клапан 9 закрыт, т.е. находится на посадочном месте 18. Выпускной клапан 7 находится в крайнем нижнем положении относительно впускного клапана 9. Рабочая жидкость через канал в переходнике, через нагнетательный канал 15 поступает в зазор между корпусом 1 и цилиндром 4, и через отверстия в цилиндре 4 поступает под поршень 5. При этом поршень 5 начинает двигаться вверх под действием силы, обусловленной давлением рабочей жидкости.
После того как боек 6, движимый поршнем 5, пройдет расстояние, которое меньше хода бойка на небольшую (около 2 мм) величину, выпускной клапан 7 перекрывает выпускной канал 19 в впускном клапане 9, который открывается, т.е. поднимается с посадочного места 18, и рабочая жидкость поступает как над, так и под поршень 5. Под действием сил инерции боек 6 продолжает движение и наносит удар по верхней наковальне 2. Т.к. площадь поршня 5 больше разности площадей поршня 5 и штока, то поршень 5 начинает двигаться вниз, при этом из-за возможности свободного относительного движения выпускного клапана 7 по отношению к поршню 5, выпускной клапан остается закрытым.
После того как боек 6 пройдет расстояние, которое меньше хода бойка на небольшую величину, хвостовик 20 срывает выпускной клапан 7, выпускной канал 19 открывается и впускной клапан 9, за счет действия пружины 13, закрывается. Под действием сил инерции боек 6 продолжает движение и наносит удар по нижней наковальне 3. Затем цикл работы повторяется.
Преимущества:
- гидравлическая перестановка клапанов;
- упрощение взаимосвязи выпускного клапана и бойка, а также уменьшение размеров и как следствие массы, выпускного клапана что приведет к более стабильной работе механизма и снижению затрат энергии на перестановку клапанов.
Недостатком является то, что при малых диаметрах происходят гидравлические сопротивления из-за размещения в впускном клапане выпускного клапана.
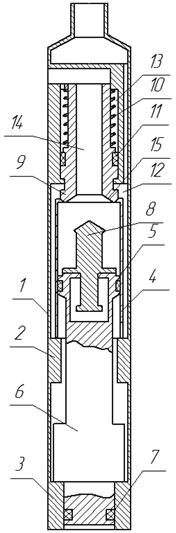
На кафедре ТТГР была предложена конструкция гидроударника О. Я. Тодера для ликвидации прихватов (рис.2.1), в котором при создании конструкции малого диаметра гидроударника сопротивление в клапанной группе сведено к минимальному.
Гидроударник содержит корпус 1 с верхней 2 и нижней 3 наковальнями, цилиндр 4, поршень 5, размещенный в цилиндре 4 и связанный с бойком 6 и штоком 7, выпускной клапан 8, установленный в бойке 6 , впускной клапан 9 с пружиной 10 и уплотнением 11, расположенный в верхней части цилиндра 4. Уплотнение 11.впускного клапана 9 образует полости высокого 12 и низкого 13 давлений. Впускной клапан 9 имеет сквозной канал 14, и два посадочных места, по наружной и внутренней поверхности, причем наружное посадочное место впускного клапана 9 взаимодействует с верхней частью цилиндра 4, а внутреннее посадочное место с выпускным клапаном 8.
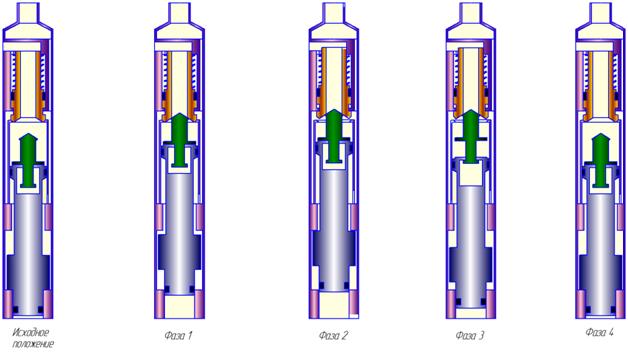
Гидроударник работает следующим образом(рис 2.2).
В исходном положении боек находится в крайнем нижнем положении. Рабочая жидкость поступает под поршень, и боек начинает движение вверх. При этом жидкость из надпоршневой полости цилиндра вытесняется в скважину. Выпускной клапан движется вверх совместно с бойком до взаимодействия с седлом на внутренней поверхности впускного клапана, перекрывая в нём выхлопной канал. За счёт взаимодействия с выпускным клапаном впускной клапан отрывается от верхней части цилиндра. В образовавшийся зазор между верхней частью цилиндра и впускным клапаном поступает жидкость из полости высокого давления. Клапаны совместно перемещаются вверх на величину хода впускного клапана, сжимая пружину. Благодаря
тому, что площадь тарелки впускного клапана практически равна площади уплотнения, то для его открытия и перемещения вверх требуется небольшая сила, достаточная для сжатия пружины. Боек наносит удар по верхней наковальне.
После того как клапаны переместились вверх, жидкость поступает как под поршень, так и в надпоршневую полость цилиндра. За счет того, что рабочая площадь поршня сверху больше чем снизу, то боек начинает движение вниз. При этом клапаны удерживаются в верхнем положении за счет давления жидкости. После того как боек захватит хвостовик выпускного клапана и оторвет его от впускного клапана, открывается выхлопной канал и давление в системе падает. Боек проходит оставшееся расстояние до нижней наковальни по инерции и наносит по ней удар. Выпускной клапан возвращается в нижнее положение, а впускной клапан перемещается пружиной вниз до взаимодействия с верхней частью цилиндра. Поступление жидкости в полость над поршнем прекращается, и рабочий цикл повторяется.

Преимущества разрабатываемого устройства:
– снижение потерь скорости бойка на свободном ходе при перестановке клапанов, как за счет уменьшения величины свободного хода, так и за счёт снижения гидравлического сопротивления клапанной группы, так как площадь впускного клапана не зависит от соотношения площадей поршня и штока и может быть равна площади цилиндра.
– повышение надежности работы гидроударника за счет облегчения его запуска, так как гидравлическая перестановка клапанов не требует со-вместного перемещения бойка и клапанов.
– внедрение гидроударника осуществляется из-за отсутствия расчетов.
В расчетах учтена особенность рабочего цикла – увеличенное время перестановки клапанов при ходе бойка вверх.Вместо использованной ранее формулы  была предложена уточненная формула
была предложена уточненная формула  .
.
где S2 – свободный ход бойка при движении вверх;  – коэффициент потерь скорости бойка на свободном ходе; S – рабочий ход бойка, Y-безразмерный параметр, t1 – время рабочего хода бойка,
– коэффициент потерь скорости бойка на свободном ходе; S – рабочий ход бойка, Y-безразмерный параметр, t1 – время рабочего хода бойка, - ход клапана,
- ход клапана, - площадь клапана, Q - расход жидкости.
- площадь клапана, Q - расход жидкости.
Уточненная формула дает увеличение времени перестановки клапанов не менее,чем на 50 % , по сравнению с результатом, полученным без учета затрат времени на гидравлическую перестановку клапанов .
Таким образом, для уточнения методики разработана программа расчетов на языке Delphi, посчитаны параметры работы гидроударника: КПД, затраты приводной и эффективной мощностей, перепад давления на гидроударнике, скорость движения бойка в конце рабочего хода и при ударе по наковальне, частота ударов, энергия единичного удара.
В процессе выполнения магистерской работы разработана методика расчета гидроударного механизма с гидравлической перестановкой клапанной группы, обоснована конструктивные параметры и технология применения.
Разработана конструкция и для нее ведется разработка рабочей документации.
В дальнейших исследованиях планируется уточнение методики расчета протекания динамических процессов в буровом снаряде при ликвидации прихватов в скважине.
Коломоец А.В. Предупреждение и ликвидация аварий в разведочном бурении. – М.:Недра, 1985, –224 с.
Неудачин Г.И., Квашин Е.В. Основные вопросы работы гидроударных буровых механизмов дифференциального действия // Сб. Совершенствование техники и технологии бурения скважин на твердые полезные ископаемые. – Вып.12,- Свердловск,1989.-с.73-78.
Калиниченко О.И., Комарь П.Л. Породоразрушающий и металлообрабатывающий инструмент – техника и технология его изготовления и применения. – Сборник статей. Вып.12, - Киев, 2009, с. 44.
Пустовойтенко И.П. Предупреждение и ликвидация аварий и осложнений в бурении. – М.:Недра, 1997.-238с.
Пустовойтенко И.П. Предупреждение и ликвидация аварий и осложнений в бурении. – М.:Недра, 1988.-279с.
Калиниченко О.И., Русанов В.А., Рязанов А.Н., Методика проектирования конструктивных и рабочих параметров забойных гидроударных машин. // В сб. «Совершенствование техники и технологии бурения скважин на твердые полезные ископаемые». – Екатеринбург: УГИ, 1993. – с. 97 – 102.
Самотой А.К. Предупреждение и ликвидация прихватов труб при бурении скважин. – М.:Недра, 1979.-182с.
Самотой А.К. Прихваты колонн при бурении скважин. М.:Недра 1984. – 204с.
Описания изобретений по классам E21B 31/113, E02D 7/10 за 1991-2001 гг.
Калиниченко О.И., Русанов В.А., Каракозов А.А. Hammer and Hammer – vibration Mechanism for Liquidation of Sticking. // Journal of Changchung University of Earth Sciences, 1993. - pp.137-139.