
Реферат за темою випускної роботи
Зміст
- 1. Маніпулятор як об'єкт дослідження
- 2. Операційні системи реального часу
- 3. Принцип реалізації програмного керування в реальному часі
- 4. Позиційний електропривод
- Висновки
- Перелік джерел
1. Маніпулятор як об'єкт дослідження
Системи керування електроприводами маніпулятора забезпечують рух виконавчого органу по заданій просторовій траєкторії шляхом керування рухами окремих ланок маніпулятора. Кожна ланка оснащується електроприводом і датчиками для контролю переміщень. Завдання на рух ланок здійснюється від пристрою програмного керування. На рис. 1 зображена функціональна схема системи керування рухом ланок триланкового маніпулятора, в якому виділені тільки переносні координати. Вплив, що керує q13, q23, q33 надходить до блоків керування БУ1 ... БУ3 электроприводами М1 ... М3 [1].
Передавальні механізми ПМ1 ... ПМЗ забезпечують реалізацію необхідного виду руху (лінійного чи кутового) ланок. Цей рух визначається узагальненими координатами q1, q2, q3. Датчики положення ланок можна встановлювати на електродвигунах і ланках маніпулятора.
У маніпуляторі на нерухомій основі 1 встановлена колона 2, яка здійснює кутові переміщення φ1 навколо вертикальної осі, а ланки 3 та 4 здійснюють кутові переміщення φ2 і φ3 навколо осей, перпендикулярних площині малюнка.
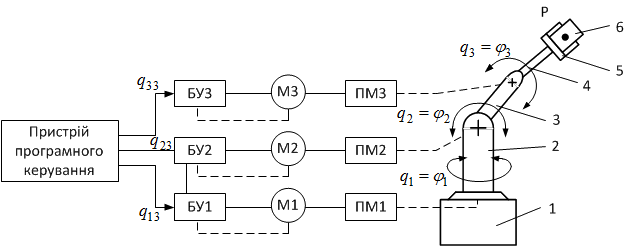
Рисунок 1 – Функціональна схема системи керуваннярухом ланок триланкового маніпулятора
Програмування траєкторії руху схвату 5 з вантажем 6 виконується в нерухомій системі координат основи. Вектор узагальнених координат схвата як функція часу технологічного процесу qc(t) формується через вектор узагальнених координат ланок маніпулятора, який у жорсткій механічній системі є вектором узагальнених координат приводів qn(t). Вектори qc(t) і qn(t) пов'язані між собою відображенням перетворення координат T, зміст якого встановлюється з рішення прямої задачі кінематики маніпулятора. Пристрій програмного керування виробляє вектор, що задає узагальнені координати приводів qnз(t), який пов'язаний з вектором, що задає узагальнені координати схвата маніпулятора qсз(t) зворотнім відображенням перетворення координат T-1. Зміст T-1 встановлюється з рішення зворотньої задачі кінематики маніпулятора.
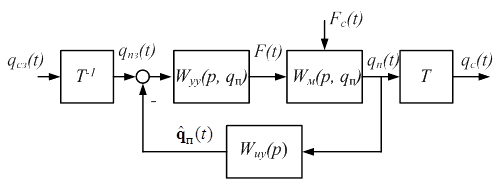
Рисунок 2 – Узагальнена матрична структурна схема системи керування
Пряма задача. Задана кінематична схема маніпулятора, і в певний момент часу відомі значення узагальнених координат, що визначають положення всіх ланок маніпулятора один щодо одного. Потрібно визначити положення і орієнтацію схвата в системі відліку, пов'язаного з основою.
Зворотня задача. Задана кінематична схема маніпулятора і відомі положення та орієнтація схвата в системі координат основи. Потрібно визначити значення узагальнених координат, які забезпечують задане положення схвату.
У загальному випадку динамічні властивості маніпулятора характеризуються матрицею Wм(p, qп) відповідно до якої виконується синтез матриці керуючих пристроїв Wуу(p, qп). В узагальненій матричній структурній схемі системи керування схватом маніпулятора F(t), Fc(t) – вектори сил, прикладених до ланок маніпулятора і опорів; qˆп(t) – вектор виміряних значень узагальнених координат приводів; Wuу(p, qп) – матриця інформаційних пристроїв. Крім головних зворотних зв'язків за узагальненими координатами приводів, в системі можуть бути зворотні зв'язки за проміжними координатам, виконані відповідно до принципів підпорядкованого керування.
Реалізуючи системи керування рухом маніпуляторів, прагнуть до того, щоб інерційні властивості приводів і ланок не вносили спотворення в задані траєкторії руху схвата. З цією метою застосовують електроприводи, що володіють великою смугою пропускання. Такими властивостями володіють сервопривода. Проте динамічні властивості маніпулятора як об'єкта керування не дозволяють це зробити однозначно, розглядаючи системи керування ланками маніпулятора як автономні системи. Через наявність коріолісових і центробіжних сил інерції для ряду схем маніпуляторів виникають динамічні взаємозв'язки ланок, що необхідно враховувати при проектуванні систем [1].
2. Операційні системи реального часу
Керування електромеханічними системами значно відрізняється від звичайної обробки даних на комп'ютері. Тут обробка даних слідує за подіями в об'єкті керування. Цифрова система керування повинна досить швидко реагувати на зовнішні події і постійно обробляти потік вхідних даних, найчастіше не маючи можливості змінити швидкість їх надходження. Одночасно система повинна забезпечувати і виконання інших, допоміжних функцій – обмін інформацією, обробка, збереження та архівування даних, їх виведення на екран, адекватна реакція на певні сигнали і т.д. Для такого режиму роботи обчислювальних пристроїв, який називають режимом реального часу, застосовують спеціальні методи програмування через особливості, властиві цьому режиму. До таких особливостей можна віднести і те, що система реального часу містить не одну, а кілька програм, кожна з яких відповідає за вирішення певного завдання, причому зв'язок між цими програмами може бути досить складним. Крім того, порядок виконання команд програми реального часу не може бути визначений заздалегідь, оскільки він залежить від зовнішніх подій і може бути змінений перериваннями. Тому й час, що витрачається на обчислення в кожному циклі роботи, може істотно змінюватись [3].
Стандарт POSIX IЕЕЕ 1003.1 дає
таке визначення: реальний час
в операційних системах – це здатність операційної системи
забезпечити необхідний рівень сервісу в певний проміжок часу
.
Отже, операційна система реального часу відрізняються своєю поведінкою,
а не внутрішнім принципом побудови. Тому якщо імовірність появи
неприпустимо великих затримок досить низька для досягнення необхідного
рівня сервісу, то така операційна система в конкретному застосуванні
може розглядатися як операційна система реального часу.
Тим не менш, існують певні методи побудови операційних систем, які забезпечують прямокутну щільність розподілу імовірності затримки і тому відносяться до операційних систем жорсткого реального часу незалежно від рівня сервісу. В операційних системах жорсткого реального часу процес представляється на виконання одночасно з зазначенням необхідного часу виконання. Планувальник операційної системи або дозволяє виконання, гарантуючи необхідний час, або відхиляє процес як неможливий для виконання. Для цього планувальник повинен точно знати, скільки часу потрібно кожної функції операційної системи для виконання завдання [2].
Базовими вимогами для забезпечення режиму реального часу є наступні:
- високопріоритетні завдання завжди повинні виконуватися в першу чергу;
- повинна бути виключена інверсія пріоритетів;
- процеси і потоки, час виконання яких не можна планувати, ніколи не повинні повністю займати ресурси системи.
Інверсією пріоритетів називають
ситуацію, коли потік з високим пріоритетом вимагає надання ресурсу,
який вже зайнятий потоком з більш низьким пріоритетом. Виходить, що
високопріоритетний потік стоїть у черзі, в той час коли виконується
низькопріоритетний (відбувається інверсія
пріоритетів
). Така ситуація
можлива, якщо є потік із середнім пріоритетом, який блокує завершення
виконання потоку з нижчим пріоритетом, а потік з вищим пріоритетом не
може початися, оскільки захоплений необхідний йому ресурс. Основним
методом вирішення цієї проблеми в операційній системі реального часу є
успадкування пріоритетів, яке полягає в наступному. Якщо
низькопріоритетний потік блокує виконання декількох високопріоритетних
потоків, то низькопріоритетний потік ігнорує призначений йому спочатку
пріоритет і виконується з пріоритетом, який є найвищим в блоці
очікуючих його потоків. Після закінчення роботи потік приймає свій
первісний
пріоритет.
Для забезпечення режиму реального часу в операційних системах можуть бути реалізовані наступні вимоги [4, 5]:
- підтримка динамічних пріоритетів (які можна змінювати в процесі виконання завдання) в багатозадачному режимі з витісняючим ядром (як для процесів, так і для потоків);
- можливість успадкування пріоритетів;
- можливість витіснення завдань ядром операційної системи;
- обмежена латентність переривань (час, протягом якого переривання заборонено, – це час обробки критичної секції коду);
- виконання сервісів операційної системи з пріоритетом, який призначається клієнтом сервісу.
Найбільш поширеними в програмованих логічних контролерах і комп'ютерах для вирішення завдань автоматизації є операційні системи Windows CE, QNX и ОS-9.
3. Принцип реалізації програмного керування в реальному часі
Розглянемо принцип реалізації
програмного керування у реальному часі в сопроцессорном модулі SM-Application,
який використовується для керування перетворювачем частоти (Control
Techniques). Програма
користувача складається з окремих розділів (завдань), які виконуються в
строго визначеній послідовності. До таких розділах відносяться (в
порядку пріоритету): Initial
,
Event
,
Pos
,
Clock
і Background
. При подачі живлення першими виконуються інструкції, записані в
розділі Initial
,
в якому задаються значення констант і початкові значення
сигналів системи керування, а також визначається її конфігурація.
Після цього починають виконуватися задачі реального часу розділів Pos
(їх може бути декілька, наприклад Pos0
і Pos1
)
і Clock
.
Інструкції, поміщені в дані розділи, циклічно повторюються через
фіксовані інтервали часу (періоди дискретності). Період дискретності
для завдання Clock
(T∂1)
може приймати цілочисельні значення від 1 до 200 мс, а для завдань Pos0
и Pos1
(T∂2)
– строго фіксовані значення: 250 мкс, 500 мкс, 1 мс, 2
мс, 4 мс і 8 мс.
Інструкції розділів Event
мають найвищий пріоритет, тому їх завдання містять дуже мале число
інструкцій. Вони переривають роботу розділів Pos
і Clock
,
і тільки після закінчення їх виконання програмапродовжує
перервані інструкції розділів Pos
і
Clock
;.
. Таким чином, в розділи
Event
доцільно поміщати алгоритми обробки певних подій, наприклад, аварійних
ситуацій.
Background
– є фоновим завданням. Воно виконується тільки в паузах між
виконаннями інструкцій інших розділів. Це завдання організується у
вигляді нескінченного циклу. Якщо він буде завершений, то більше
не буде виконуватися.
На рис. 3 представлена концепція взаємного переривання завдань.

Рисунок 3 – Часова діаграма виконання розділів інструкцій
Як видно з тимчасової діаграми,
виконання інструкцій розділу Clock
переривається виконанням розділу Pos
(він має більш високий пріоритет, ніж Clock
,
і менший період дискретності). Тому розробники рекомендують у розділи Pos
поміщати інструкції, пов'язані з коригуванням контурів регулювання
швидкості і (або) положення, а в розділ Clock
– інструкції, які не потребують такого швидкого виконання як
завдання розділу Pos
,
наприклад формування задатчика положення.
Всі інструкції програми повинні
розташовуватися тільки всередині певного завдання. Інструкції розділів Pos
і Clock
,
, повинні бути виконані за час, менше, ніж їх періоди дискретності;
інакше завдання з меншими пріоритетами (виконувані в паузах цих
завдань) не отримають часу для свого виконання. Це може привести до
відключення процесора з перевантаження [6].
4. Позиційний електропривод
В електроприводах промислових маніпуляторів широко використовуються позиційні системи. Характерним для таких приводів є наявність модулів вимірювання та регулювання положення. В сучасних комплектних електроприводах реалізація режимів позиціонування виконується за допомогою інтелектуальних модулів розширення контролерів приводів.
Як відомо, позиційні режими реалізуються з обмеженням вихідних сигналів регуляторів положення і швидкості. Програмна реалізація регуляторів передбачає також аналіз рівнів сигналів завдання і помилок систем та їх похідних, меж допустимих значень змінних, корекцію обмежень і інші додаткові функції, що забезпечують задані або гранично-досяжні динамічні властивості систем.
Для позиційних систем розроблені закони керування, оптимальні за швидкодією або по тепловим втратам. Керування, яке мінімізує теплові втрати, до недавнього часу практично не застосовувалося в промислових системах електроприводу. Це пов'язано з більш складною формою управляючих впливів, які досить складно відтворити за допомогою аналогових пристроїв.
Стосовно кутових переміщеннь на рис. 4 а, б показані прямокутні часові діаграми прискорень ε(t), а також часові діаграми швидкостей ω(t) і переміщень φ(t) для режимів малих і великих позиціонувань механізмів, на рис. 4 в, г – параболічні тимчасові тахограми для тих же режимів при допущенні, що момент опору дорівнює 0 і на рис. 4 д, е – параболічні тимчасові тахограми з обмеженням ривка.
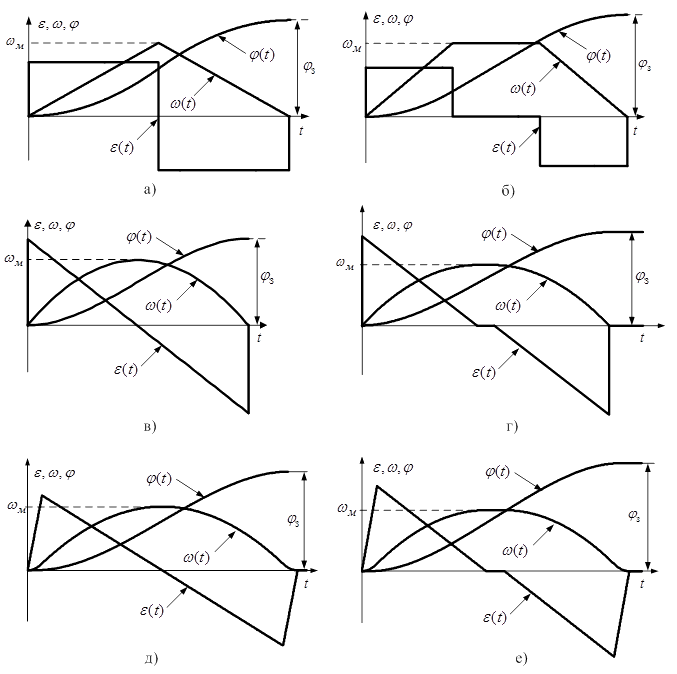
Рисунок 4 – Діаграми позиціонування
Застосування систем регулювання положення, оптимальних за тепловими втратами, дозволяє знизити енергоспоживання, але вимагає використання цифрових задатчиков положення, що реалізують досить складні закони керування. Існуючі алгоритми оптимального керування розроблені в аналоговій формі, без урахування явищ квантування за часом, екстраполяції та особливостей цифрового інтегрування. Нехтування цими факторами призводить до помилок формування еталонного керуючого впливу, що перешкоджає вирішенню поставленого завдання.
При реалізації систем з дискретними датчиками положення позиціонування виконується з точністю до однієї дискрети датчика. При цьому в контролері приводу відповідно до обсягу завдання і обмеженнями на похідні прискорення розраховується оптимальна траєкторія руху механізму. Похибка позиціювання в таких системах може бути скільки завгодно малою. При використанні в якості датчиків положення лазерних інтерферометрів ця похибка може вимірюватися мікромілліметрамі.
Висновки
Таким чином, задача розробки систем програмного управління електромеханічними маніпуляторами з поліпшеними динамічними, статичними і енергетичними показниками є актуальною.
Її вирішенню сприяє розробка задаючих пристроїв, що реалізують оптимальні закони керування в режимі реального часу.
Метою роботи є зниження непродуктивних витрат електроенергії, підвищення точності позиціонування і поліпшення динамічних властивостей системи позиційного електроприводу за допомогою розробки оптимальних цифрових алгоритмів формування керуючого впливу стосовно до систем підпорядкованого регулювання положення.
Для досягнення зазначеної мети необхідно вирішити наступні завдання:
- розробка цифрового алгоритму керування позиційним електроприводом з урахуванням ефектів квантування за рівнем і екстраполяції;
- теоретичне обгрунтування вибору алгоритмів цифрового інтегрування для задатчика положення, що формує оптимальні за швидкодією або за тепловими втратами закони керування;
- розробка методики програмної реалізації цифрової системи регулювання положення в режимі реального часу.
При написанні даного реферату магістерська робота ще не закінчена. Остаточне завершення: грудень 2012 року. Повний текст роботи і матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Перелік джерел
- Белов М.П. Автоматизированный электропривод типовых производственных механизмов и технологических комплексов: учебник / М.П. Белов, В.А. Новиков, Л.Н. Рассудов. – М.: Изд. центр «Академия», 2004. – 576 с.
- Олссон Г., Пиани Д. Цифровые системы автоматизации и управления – СПб.: Невский диалект, 2001. – 557с.
- Ишматов З.Ш. Микропроцессорное управление электроприводами и технологическими объектами. Полиномиальные методы: монография / З.Ш. Ишматов. Екатеринбург: УГТУ-УПИ, 2007. – 278с.
- Денисенко В.В. Компьютерное управление технологическим процессом, экспериментом, оборудованием. – М.: Горячая линия – Телеком, 2009. – 608с.
- Сорокин С. Системы реального времени // Современные технологии автоматизации. №2, 1997, с. 22 – 29.
- Руководство пользователя SM-Applications. Дополнительный модуль для Unidrive SP. Редакция 4. – 2004. – 113 с.
- Толочко
О.И. К
вопросу об изменении типовых структур цифровых систем управления
комплектными электроприводами / О.И. Толочко, П.И. Розкаряка, Н.М.
Горобец // // Наукові праці ДонНТУ. Серія:
Електротехніка і енергетика
. – Вип. 10 (180). – Донецьк: ДонНТУ, 2011. – C.188-193. - Толочко О.И., Коцегуб П.Х., Розкаряка П.И. Синтез задатчика положения с ограничением рывка при учете статического момента // Вісник Кременчуцького державного політехнічного університету: Наукові праці КДПУ. – Кременчук: КДПУ. – 2008. – №3 (50). – Ч.1. – С. 58-63.