Реферат за темою випускної роботи
Зміст
Вступ
Дотик - це найбільш поширений орган чуття людини, тому як тактильні клітини, розташовані в шкірі і слизових оболонках, поширені по всьому тілу. Тактильне сприйняття поряд з іншими видами почуттів людини є надзвичайно важливим елементом для повноцінної фізичної взаємодії з навколишнім середовищем, будь то, ходьба, біг, сидіння на стільці, уникнення перешкод, маніпулювання предметами або використання предметів, взаємодія з іншими агентами. У кожному з наведених взаємодій, тактильне сприйняття служить для визначення умов контакту між діючим агентом і навколишнім середовищем або іншими агентами. Тактильне сприйняття в загальному сенсі, описує вимір багатьох умов контакту між двома поверхнями, в тому числі, зону контакту, тиск, температуру, зсув або текстуру. Насправді це те, що робить система дотику людини для визначення різних типів фізичної взаємодії, яке людині доводиться зустрічати при взаємодії нашої шкіри і навколишнього середовища.
Актуальність теми
В останні кілька десятків років спостерігається активний розвиток робототехнічних комплексів і систем штучного інтелекту. Роботи призначені не тільки для імітації фізичних дій людини, але й для допомоги в діяльності людини, рішенню різного роду прикладних завдань. При створенні таких систем використовуються методи, що базуються на моделюванні особливостей сприйняття, переробки і відображення інформації. Тактильне взаємодія є однією з ключових взаємодій між роботом і людиною, або між роботом і роботом. Використання штучної шкіри у робототехніці допомагає адаптувати поведінку робота до зовнішніх сил, підвищити спритність і інтелектуальну взаємодію, які виникають у процесі взаємодії робота з навколишнім середовищем та людиною.
Додатки тактильних датчиків можливо використовувати в різних областях, що включають в себе штучну шкіру для роботів, медичні додатки, протезування, додатки реабілітації, пристрої безпеки, людино-машинний інтерфейс, автоматизація, спортивні програми, віртуальна реальність і багато іншого.
Мета і задачі дослідження
Метою моєї магістерської роботи є дослідження та розробка прототипу штучної шкіри, придатного до використання для покриття ділянок тіла гуманоїдного робота.
Основні етапи дослідження:
- Бібліографічний огляд існуючих підходів і систем реалізації штучної шкіри;
- Вибір і обгрунтування вибору системи штучної шкіри;
- Розробка та налагодження апаратної частини;
- Розробка нових і модифікація існуючих моделей нейронної мережі для обробки даних для отримання картини розподілу тиску для визначення зовнішніх фізичних впливів на штучну шкіру;
- Експериментальне дослідження розробленого прототипу штучної шкіри.
Для експериментальної оцінки теоретичних і практичних отриманих результатів планується апробація розробленого прототипу штучної шкіри на реальних роботах у лабораторії ETIS університету Сержі-Понтуаз (Université de Cergy Pontoise), Франція.
Огляд існуючих систем штучної шкіри
Розробка тактильних датчиків, можливих для застосування у вигляді штучної шкіри для роботів є актуальною проблемою робототехніки і привертає увагу багатьох вчених, переважно європейських, американських, канадських, японських учених.
Поява тактильних датчиків, призначених для геометричного розпізнавання предметів навколишнього простору, обумовлено розвитком робототехніки. Основна тенденція в області створення тактильних датчиків – відтворення дотикових властивостей людської шкіри. Цій тенденції найбільшою мірою задовольняють тактильні пристрої матричного типу, так як кожна клітинка матриці, що представляє собою мікроелектронний датчик сили (або деформації, моменту), дає конкретну інформацію, а всі разом дозволяють сформувати цілісне уявлення про форму предмета.
Тактильні датчики можуть класифікуватися за принципом роботи і фізичній природі. За принципом роботи тактильні датчики можна розділити на резистивні, ємнісні, індуктивні, оптичні, магнітні, п'єзоелектричні, ультразвукові, магнітоелектричні. Крім того, по фізичній природі датчики можуть бути гнучкими, еластичними, жорсткими і твердими, і т.д.
Сучасні тактильні датчики для роботів повинні мати такі властивості [1]:
висока чутливість, здатність сприймати тиск (силу), перетворювати його в електричні сигнали, що дозволяють визначити форму і матеріал предмета;
високиий просторовий дозвіл;
добрі лінійні характеристики (припустимі лише відхилення, компенсовані при обробці сигналу на ЕОМ);
незначний гістерезіс;
стійкість до перевантажень і важких умов роботи;
невеликі розміри і масу;
мінімальним вміст проводів в чутливій зоні;
простий механізм монтажу або приєднання;
низьку собівартість.
Нижче наводжу опис різних типів тактильних датчиків [2]:
Резистивні датчики зазвичай складаються з двох провідних шарів, розділених повітрям або непровідним матеріалом. Принцип їх роботи заснований на резистивному принципі. Бувають двох типів: а) опір залежить від місця прикладання сили, б) опір залежить від величини прикладеної сили. Резистивні датчики, чутливі і дешеві, але володіють великим енергоспоживанням. Недоліком резистивних датчиків є також те, що зазвичай вони здатні визначити лише одну точку контакту.
П'єзорезистивні датчики виготовляються з матеріалу, опір якого змінюється з силою/тиском. Система, побудована на датчиках подібного типу, була використана для створення антропоморфної руки [3]. Датчики сили FSR (Force Sensing Resistors) (рис.1), засновані на п'єзоелектричному ефекті, широко використовуються в пристроях, що визначають положення. Такі датчики мають широке використання через низьку вартість, низький рівень шуму, просту електроніки та високу чутливість. Зустрічаються в багатьох експериментальних тактильних системах [4]. Мають недоліками: вимагають ручний або серійної зборки на високому технологічному рівні, володіють нелінійним відгуком і мають гістерезис, виконуються на порівняно жорсткій підкладці.
 Рисунок 1 - Датчики сили FSR.
Рисунок 1 - Датчики сили FSR.
Тактильні датчики з композитних матеріалів, засновані на ефекті квантового тунелювання (Quantum Tunnel Composites, QTC). QTC мають унікальну здатність переходити з стану практично ідеального ізолятора в стан провідника при прикладанні до нього сили: стиснення, деформації, скручування, розтягування матеріалу. Перехід зі стану ізолятора в стан провідника відбувається по експоненційній залежності. Композитні матеріали складаються з частинок металу і непровідного гумового сполучного елемента.
Ємнісні тактильні датчики складаються з пластинчастого конденсатора, в якому відстань між пластинами або ефективна площа змінюються при прикладанні сили завдяки зміні положення. І відповідно зміною цієї відстані викликається зміна електричної ємності конденсатора. Ємнісні датчики можуть виготовлятися дуже маленького розміру, що дозволяє побудувати масив датчиків (рис. 2, 3, [5]), а також дозволяють проводити вимірювання в динаміці. Мають високу чутливість, просторовий дозвіл і швидкодість, несприйнятливі до перешкод і їх можливо розташувати на пальцях робота будь-якої конструкції.
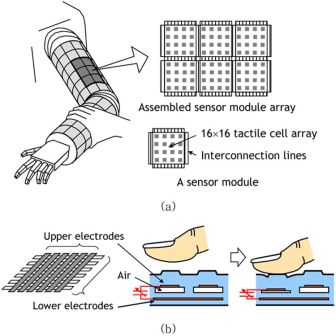 Рисунок 2 - Схематичне зображення модульного, розширюваного ємнісного датчика: (а) масив модулів датчика, (b) структура одного осередку датчика. Ємність тактильного датчика змінюється, залежно від зміни повітряного просвіту у функції прикладеної сили.
Рисунок 2 - Схематичне зображення модульного, розширюваного ємнісного датчика: (а) масив модулів датчика, (b) структура одного осередку датчика. Ємність тактильного датчика змінюється, залежно від зміни повітряного просвіту у функції прикладеної сили.
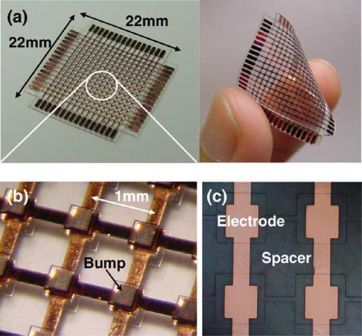 Рисунок 3 – (а) Виготовлений модуль тактильного датчика, (b) збільшене зображення осередку, (c) нижні електроди и розділовий шар (spacer).
Рисунок 3 – (а) Виготовлений модуль тактильного датчика, (b) збільшене зображення осередку, (c) нижні електроди и розділовий шар (spacer).
Оптичні тактильні датчики засновані на ефекті зміни оптичних властивостей параметрів матеріалу, під дією прикладеної до них сили. Оптичні датчики можуть вимірювати маленькі величини сили, як 0,001 Н з просторовим дозволом 5 мм. [6]. Оптичні тактильні датчики нечутливі до електромагнітних полів, гнучкі, чутливі, швидкі, але в теж час вони громіздкі.
Акустичні ультразвукові датчики ще одна технологія, яка використовується для створення тактильних датчиків. Основним елементом ультразвукового датчика є електроакустичний перетворювач, в якості якого часто використовується п'єзоелектричний керамічний елемент. Оскільки один і той же перетворювач використовується зазвичай як для передачі, так і для прийому сигналів, для виявлення об'єктів в ближній зоні необхідно швидке демпфування акустичної енергії. Це досягається шляхом застосування акустичних поглиначів і розв'язкою перетворювача від корпусу. Конструкція корпусу дозволяє отримати вузький акустичний потік, що дає потужний спрямований сигнал. Перевагою таких датчиків є швидка динамічна відповідь і високий дозвіл.
Магнітні тактильні датчики засновані на принципі вимірювання щільності потоку, породженого прикладеною силою. Вимірювання може бути досягнуто шляхом ефекту Холла [7], або магніторезистивним. Датчики на основі магнітного принципу мають ряд переваг, у тому числі: висока чутливість, великий динамічний діапазон, лінійний відгук, фізична надійність і не мають механічний гістерезис. Проте їх використання обмежене у немагнітному середовищі.
Робота п'єзоелектричного датчика заснована на властивості деяких кристалів виділяти на поверхню заряди при стисненні або розтягуванні. Прикладом таких кристалів є кварц, сегнетокераміки та інші. Вимірюваний тиск сприймається мембраною і передається пьезочутливим пластинам. Напруга знімається з металевих обкладок. Температурна чутливість п'єзоелектричних матеріалів є однією з основних причин малого їх використанні в якості датчиків.
В таблиці 1 представлені характеристики різних типів тактильных датчиків.
Таблица 1 – Переваги та недоліки різних типів тактильних датчиків [2].
|
Резистивний
|
- чутливість
- низка собівартість
|
|
|
П'єзорезистивний
|
- низка собівартість
- чутливість
- низкий рівень шуму
- проста электрониіа
|
- жорсткість і крихкість
- нелінійна відповідь
- гістерезис
- чутливість до температури
|
|
Ефект квантового тунелювання
|
|
|
|
Ємнісний
|
- чутливість
- низька собівартість
|
- нестійкість до перехресних перешкод
- гистерезіс
- складність виготовлення
|
|
Оптичний
|
- стійкість до електромагнітних перешкод
- гнучкість
- чутливість
- швидкість роботи
|
- громіздкість
- висока споживана потужність
- складність обчислень
|
|
Ультразвуковий
|
- швидка динамічна відповідь
- високий дозвіл
|
- обмежені утиліти на низьких частотах
- складність виготовлення
- чутливість до температури
|
|
Магнітний
|
- чутливість
- великий діапазон
- відсутність механічного гістерезісу
- фізична міцність
|
- чутливість до магнітних перешкод
- громіздкість
- високе споживання енергії
|
|
П'єзоелектричний
|
- гарні динамічні характеристики
- велика смуга пропускання
|
- чутливість до температури
- не надійні електричні з'єднання
|
|
Провідна гума
|
- гнучкість, еластичність
- низька собівартість
- низьке енергоспоживання
|
- механічний гістерезис
- нелінійний відповідь
|
У подальшому дослідженні, в якості тактильного датчика, для створення штучної шкіри була обрана провідна гума, з причини своєї низької вартості і електроспоживання. Також перевагою такого типу штучної шкіри є те, що їй можливо покриття великих ділянок поверхні робота, відсутність дротів в більшій частині контактної зони. В якості провідної гуми була обрана провідна тканина Velostat ®.
Дослідження моєї магістерської роботи щільно перетинаються і продовжують дослідження, представлені в магістерської роботи Ганни Пугач [8, 9].
Дослідження провідного матеріалу Velostat®
Матеріал Velostat® [12] являє собою непрозору об'ємно-провідну плівку, наповнену поліолефіном. Матеріал є дуже гнучким і трохи еластичним. Електричні властивості матеріалу не залежать від вологості і не схильні до старіння. Активний опір матеріалу зменшується при прикладанні тиску. Якщо матеріал розташувати між двома провідними шарами, можливо використовувати матеріал у вигляді датчика тиску або сгину. Він може бути також використаний для визначення точки дотику.
Метою дослідження є вимірювання електричних характеристик відгуку матеріалу Velostat® [8]. Для дослідження було взято матеріал розміром 80 х 35 мм. На ньому закріпили 4 електроди, одна пара для подачі постійного струму величиною 200 мА, інша для вимірювання напруги. У центр шматка тканини прикладається сила з поверхнею контакту діаметром 25 мм, величина якої вимірюється датчиком сили FSR 154. Досліди проводилися з провідним і непровідним об'єктом (рис. 4). Результати вимірювання: графіки зміни, тиску, що прикладається до матеріалу, і опору матеріалу, в тимчасових осях, наведені нижче (рис. 5, 6):
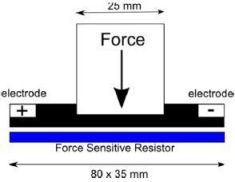
 Рисунок 4 - Експериментальна установка для визначення властивостей провідної плівки Velostat ® при фізичному контакті з об'єктом
Рисунок 4 - Експериментальна установка для визначення властивостей провідної плівки Velostat ® при фізичному контакті з об'єктом
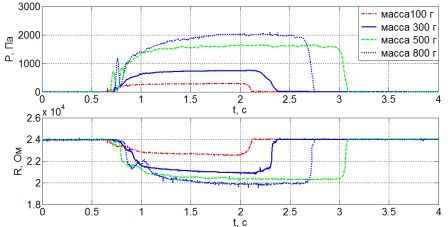 Рисунок 5 - Характеристики провідної плівки Velostat® при взаємодії з провідним об'єктом
Рисунок 5 - Характеристики провідної плівки Velostat® при взаємодії з провідним об'єктом
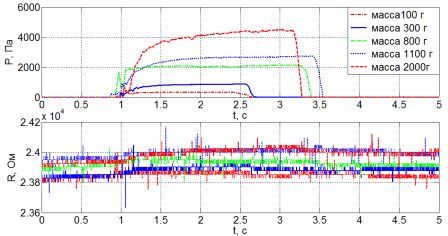 Рисунок 6 - Характеристики провідної плівки Velostat® при взаємодії з непровідним об'єктом
Рисунок 6 - Характеристики провідної плівки Velostat® при взаємодії з непровідним об'єктом
За результатами досліджень (рис. 5, 6) можна зробити висновок про те, що матеріал Velostat® слабо реагує на непровідні об'єкти. Опір матеріалу змінюється незначно, на 1.5% при контакті з непровідним об'єктом, але при контакті з проводять об'єктом змінюється на 30-50%.
Але це вимірювання вироблено з припущенням того, що повний опір тканини Velostat® має чисто активний характер. У ході наших досліджень, виникло припущення, що тканина також має будь-який реактивний опір. Для перевірки цього, була знята перехідна характеристика матеріалу в ненавантаженому стані. Для цього на одну пару електродів був поданий стрибок напруги, амплітудою 6.5 В (рис. 7, чорна лінія), а з іншої пари - знято відгук тканини (рис. 7, червона лінія):
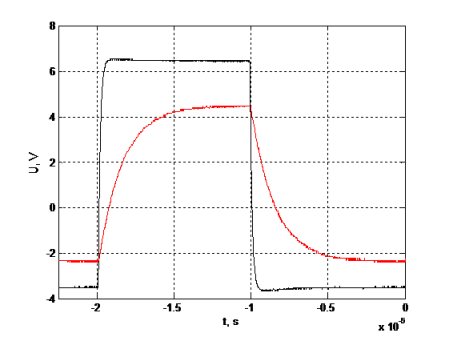 Рисунок 7 - Перехідна характеристика матеріалу Velostat® в ненавантаженому стані
Рисунок 7 - Перехідна характеристика матеріалу Velostat® в ненавантаженому стані
За результатами даного дослідження можна зробити висновок, що досліджуваний матеріал володіє також реактивним опором, і може бути представлений аперіодичною ланкою першого порядку, при припущенні, що властивості матеріалу незмінні з часом. Передавальна функція буде мати вигляд:

де,
- Т=1.3736 мкс – постійна часу аперіодичної ланки;
- k=0.6214 – коефіцієнт передачі ланки.
За результатами даних дослідів було зроблено висновок, що для штучної шкіри, заснованої на використанні матеріалу Velostat®, доцільно використовувати змінний струм частотою близько: 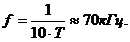 . (Перехідний процес закінчитися при часі 5•Т, але для невеликого запасу будемо використовувати змінний струм періодом 10•Т).
. (Перехідний процес закінчитися при часі 5•Т, але для невеликого запасу будемо використовувати змінний струм періодом 10•Т).
Електоімпеденсна томографія (ЕІТ)
Це методика, що дозволяє визначити просторовий розподіл електричного імпедансу (або провідності) всередині об'єкта за результатами неінвазивних електричних вимірювань. Для реконструкції зображення використовуються значення електричного потенціалу, виміряні на поверхні об'єкта, при пропущенні через нього струму. Методика ЕІТ спрямована на реконструкцію зображення поперечного перерізу (2D, 3D) внутрішнього просторового розподілу електропровідності, шляхом введення малих значень струмів (постійного або змінного струму) за допомогою електродів, розміщених на поверхні досліджуваного об'єкта і вимірюванням електричного потенціалу [10]. Метод ЕІТ знайшов широке застосування в медицині, промисловості, природних і прикладних науках. Існує кілька методів вимірювань, які використовуються в ЕІТ. У роботі Браун і Сегар [11] запропоновано метод сусідніх електродів. На рис. 8 представлена ідея цього методу для циліндричного провідника з 16 симетрично розташованими електродами. Спочатку струм підводить до електродів в пару 1-16, між якими щільність струму вище, ніж між іншими. Щільність струму швидко зменшується у функції від відстані.
Далі, ми вимірюємо різницю напруг між іншими парами електродів, що відповідає 13 вимірюваням стану матеріау. На наступному кроці, ми вводимо струм через іншу пару електродів 2-1, і вимірюємо послідовно 13 можливих падінь напруги. Тобто для одного циклу вимірювань отримаємо 13•16 = 208 вимірів напруги.
 Рисунок 8 - Метод сусідніх електродів ЕІТ для циліндричного провідника з 16 симетрично розташованими електродами.
(Анімація: 7 кадрів, 10 циклів повторення, 55 кілобайт)
Рисунок 8 - Метод сусідніх електродів ЕІТ для циліндричного провідника з 16 симетрично розташованими електродами.
(Анімація: 7 кадрів, 10 циклів повторення, 55 кілобайт)
Існують ще й інші методи збору даних, які можуть бути використані спільно з методом ЕІТ. Метод перехресних електродів [12] не має гарну чутливість на віддалених електродах так само добре, як метод сусідніх електродів, але має кращу чутливість по всій області. Метод протилежних вимірювань імпедансу дає більш рівномірний розподіл струму і має хорошу чутливість. Крім того існує адаптивний метод [88], який пропонує нелінійну залежність між розмірами провідника, числом пар електродів і значенням введеного струму з метою отримання однорідного розподілу струму.
У подальших моїх дослідженнях буде використовуватися метод сусідніх електродів вимірювання та збору даних з провідного матеріалу Velostat®, і після збору буду використовувати методику ЕІТ для реконструкції зображення. Хоча можливо буде використаний і інший підхід для реконструкції зображення, за допомогою використання штучних нейронних мереж.
Виновки
Моя магістерська робота присвячена актуальній науковій задачі в галузі робототехніки – створенню тактильного датчика, для застосування у вигляді штучної шкіри для гуманоїдного робота. На даний момент, у рамках проведених мною досліджень виконано:
Проаналізовано існуючі системи тактильних датчиків, можливих для використання в якості штучної шкіри.
Вибрано тип найбільш відповідного типу тактильного датчика – провідної гуми. В якості провідної гуми була обрана провідна тканина Velostat®.
Проведено ряд експериментів з дослідження характеристик матеріалу Velostat®.
Проаналізовано метод збору даних з провідного матеріалу і реконструкції зображення розподілу тиску на поверхні провідної тканини, в основі якого буде використано метод сусідніх електродів, методу ЕІТ.
Подальші дослідження спрямовані на наступні ключові моменти:
Розробка та створення апаратної частини тактильного датчика для фізичної взаємодії людина-робот.
Реалізація алгоритмів реконструкції зображення, заснованих на використанні штучних нейронних мереж.
Оцінка і експериментальні дослідження розробленого прототипу штучної шкіри.
Зауваження
Висловлюю величезну подяку всім, хто приймає участь у написанні даної роботи і проведенні досліджень.
На період написання даного реферату магістерська робота ще не завершена. Завершення роботи - січень 2014 року. Більш детальну інформацію за ціма дослідженнями можна отримати у автора, а повний текст і матеріали роботи - після завершення магістерської роботи.
Перелік посилань
П.М. Таланчук, С. П. Голубков, В. П. Маслов. Сенсоры в контрольно-измерительной технике // Киев. Техника, C. 1991. –173.
R.S. Dahiya, M.Valle. Tactile sensing for robotic applications.
Karsten Weiss, Heinz Woern. Tactile Sensor System for an Anthropomorphic Robotic Hand.
M. A. Diftler, R. Platt Jr, C. C. J., R. O. Ambrose, W. J. Bluethmann. Evolution of the nasa/darpa robonaut control system // IEEE Int. Conf. on Robotics and Automat., 2003‒P. 2543–2548.
Hyung-Kew Lee, Sun-Il Chang, and Euisik Yoon. A Flexible Polymer Tactile Sensor: Fabrication and Modular Expandability for Large Area Deployment // Journal of microelectromechanical systems, vol. 15, no. 6, december 2006.
Yoshiyuki Ohmura, Yasuo Kuniyoshi, Akihiko Nagakubo. Conformable and Scalable Tactile Sensor Skin for Curved Surfaces // Proceedings of the 2006 IEEE International Conference on Robotics and Automation Orlando, Florida - May 2006.
E. Torres-Jara, I. Vasilescu, R. Coral. A soft touch: Compliant tactile sensors for sensitive manipulation // CSAIL, Massachusetts Institute of Technology, Tech. Rep., 2006.
А. А. Пугач. Усовершенствование алгоритмов управления движением сфероподобных объектов на моторизированной плоскости с помощью тактильной обратной связи с использованием искусственной кожи и надежность предложенной технической системы. Руководители: д.т.н., проф. Ковалев А. П., к.т.н Александр Питти (Университет Сержи-Понтуаз).
G. Pugach, V. Khomenko, A. Melnyk, A. Pitti, P. Henaff, P. Gaussier. Electronic hardware design of a low cost tactile sensor device for physical Human-Robot Interactions. IEEE ELNANO 2013 XXXIII International Scientific Conference Electronics and nanotechnology, - Kyiv, Ukraine : IEEE. – April 16-19, 2013. – pp. 445 – 448.
A. Adler, R. Guardo. Electrical impedance tomography: regularized imaging and contrast detection // Apr. 1996. IEEE Transactions on Medical Imaging, 15(2):170-179.
Brown B H, Seagar A. Applied potential tomography data collection problems // Int. Conf: on Electric and Phjsiol. Mras. 8 13-3 I.
Kauppinen P, Hyttinen J, Malmivuo J (2006): Sensitivity distribution visualizations of impedance tomography measurement strategies. Int. J. Bioelectromagnetism 8:(1) pp. VII/1 - VII/9.
Plug and Wear [электронный ресурс]. - Режим доступа: www.plugandwear.com