
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Дослідження асинхронного режиму
- 2. Заходи для підвищення динамічної стійкості
- 3. Математичне моделювання динамічних режимів синхронного генератора
- Висновки
- Перелік посилань
Вступ
Забезпечення динамічної стійкості синхронних генераторів в аварійних режимах є однією з найбільш актуальних завдань управління сучасними електричними станціями і системами. Та обставина, що система зберігає статичну стійкість у сталому режимі роботи, ще не дозволяє стверджувати, що вона виявиться стійкою і при різких раптових порушеннях режиму її роботи, подібних до короткого замикання, відключення генераторів або ліній та інше [1].
Під час переходу генератора в асинхронний режим в міру зниження магнітного потоку, створюваного до цього струмом в обмотці ротора, генератор починає споживати реактивну потужність з мережі.
Рівновага між зменшуваним до нуля синхронним електромагнітним моментом і обертаючим моментом турбіни порушується, і частота обертання генератора починає перевищувати синхронну. Під впливом магнітного поля від струму статора, в зубцях і клинах ротора і в його обмотці, якщо вона залишається замкнутої на збудник або замкнеться на резистор самосинхронізації, з'являться струми з частотою ковзання. Магнітний потік від цих струмів, взаємодіючи з магнітним полем статора, створює гальмуючий асинхронний момент, що забезпечує видачу генератором активної потужності в мережу при асинхронному режимі. Асинхронний гальмуючий момент із збільшенням ковзання ротора зростає. Коли він стане рівним обертаючому моменту турбіни, подальше підвищення ковзання припиниться. Настане сталий асинхронний режим.
Реагуючи на збільшення частоти обертання, регулятор частоти обертання турбіни скорочує надходження пара (води) і тим самим зменшує активну потужність. Струми, що з'являються в зубцях, клинах і бочці ротора, при асинхронному режимі турбогенератора викликають нагрівання ротора. При підвищеному ковзанні струм статора може значно перевищувати номінальне значення, що може призвести до перегріву обмотки статора. Через зростання результуючої магнітної індукції в торцевих областях турбогенератора при втраті збудження збільшується підігрів крайніх пакетів сталі і конструктивних елементів торцевих зон статора.
У асинхронному режимі в обмотці ротора наводиться напруга. Якщо обмотка ізольована або включена не на електромашинний збудник, а на систему випрямлячів збудження, що виключає проходження струму зворотної полярності, то при великих ковзаннях наведена напруга може досягти небезпечного для обмотки ротора і випрямлячів значення. Тому асинхронний режим дуже небезпечний для генераторів [3].
Метою роботи є дослідження асинхронних режимів електричних станцій і розробка засобів щодо підвищення динамічної стійкості.
Вихідними даними для виконання роботи є:
- Довідкові дані миттєвих значень струмів, напруг, швидкостей турбогенератора та ін., отриманих шляхом цифрового осцилографування.
- Параметри електроенергетичної системи (ЕЕС), на основі яких розраховані еквівалентні ЕРС E, опору R, ємності C, індуктивності L [4].
Основні завдання розробок і досліджень:
- довести необхідність уникнення асинхронного режиму;;
- виявлення асинхронних режимів на ранньому етапі;
- удосконалити дискретну математичну модель для аналізу динамічних режимів електричної системи, на основі якої створено програму PowerNet;
- запропонувати новий принцип захисту.
1. Дослідження асинхронного режиму
Розглянемо метод контролю кута виліту ротора (в реальних умовах важко виміряти даний кут). Для цього виконаємо моделювання збудженого асинхронного режиму генератора при близькому КЗ [6].
Перед розгляданням аварійного режиму визначимо залежність стійкості від кута виліту ротора. У режимі роботи в точці а (рис. 1) потужності генератора і турбіни врівноважують один одного. Якщо припустити, що кут δa отримує невеликий приріст Δδ , то потужність генератора, дотримуючись синусоїдальної залежності від кута, також зміниться на певну величину ΔР, причому, як видно з рис.1 в точці а позитивному приросту кута Δδ відповідає також позитивна зміна потужності генератора ΔР .
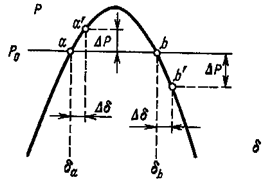
Рисунок 1 – Зміна потужності при прирості кута
Що ж стосується потужності турбіни, то вона не залежить від кута δ і при будь-яких змінах останнього залишається постійною і рівною Рo. В результаті зміни рівновага моментів турбіни і генератора виявляється порушеною і на валу машини виникає надмірний момент гальмуючого характеру, оскільки гальмуючий момент генератора за рахунок позитивної зміни потужності ΔР переважає над обертаючим моментом турбіни.
Під впливом гальмуючого моменту ротор генератора починає сповільнюватися, що обумовлює переміщення пов'язаного з ротором вектора Е.Р.С. генератора в бік зменшення кута δ. У результаті зменшення кута знову відновлюється початковий режим роботи в точці а, отже, цей режим повинен бути визнаний стійким. До того ж висновку можна прийти і при негативному прирості кута Δδ в точці а.
Зовсім інша виходить картина в точці b. Тут позитивний приріст кута Δδ супроводжується не позитивною, а негативною зміною потужності генератора δР. Зміна потужності генератора викликає появу надлишкового моменту прискорюючого характеру, під впливом якого кут не зменшується, а зростає. Зі збільшенням кута потужність генератора продовжує падати, що обумовлює подальше збільшення кута і т. д. Процес супроводжується безперервним переміщенням вектора Е.Р.С. Е щодо вектора напруги приймальної системи U і станція випадає із синхронізму.
Рисунок 2 – Випадання з синхронізму
Таким чином, режим роботи в точці b статично нестійкий і практично нездійснений.
На рис. 3 представлена схема блочної ТЕС. Моделюється перехідний режим при короткому замиканні на стороні вищої напруги (ВРП 110 кВ) з подальшим його відключенням [5].
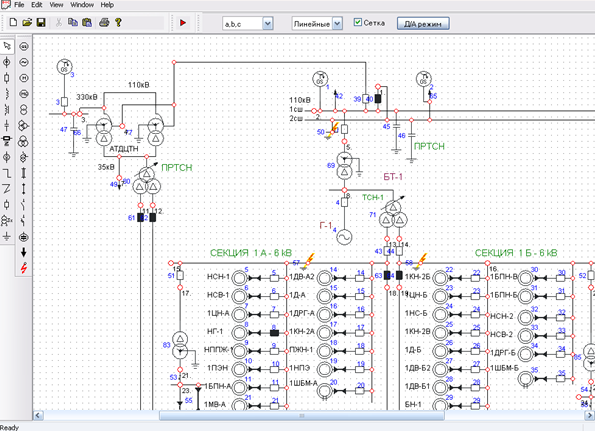
Рисунок 3 – Фрагмент схеми блочної ТЕС
Спостерігаємо процес відключення короткого замикання за час відключення 0,5 с.
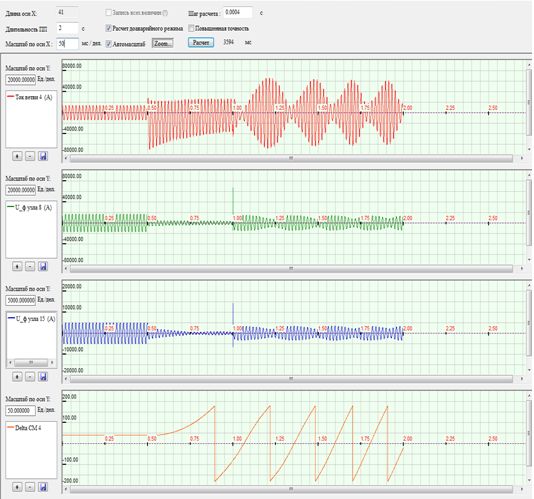
Рисунок 4 – Осцилограма перехідного процесу відключення короткого замикання через 0,5 с: а) струм генератора (гілка № 4); б) напруга вузла № 8; в) напруга вузла № 15; г) кут виліту ротора.
Показано чотири осцилограми. На першій осцилограмі показаний струм гілки №4 (генератор), на другий осцилограмі напруга вузла №8, третя осцилограма - напруга вузла 15 і на четвертій осцилограмі кут виліту ротора Delta. За час К.З. Delta зростає і після відключення настає стійкий або збуджений асинхронний режим.
На рис. 5 показаний перехідний процес відключення КЗ через 0,25 с.
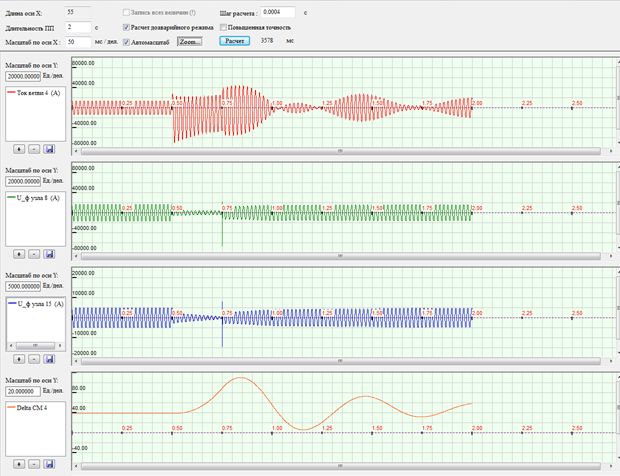
Рисунок 5 – Осцилограма перехідного процесу відключення короткого замикання через 0,25 с.
Як видно з осцилограми, кут вильоту ротора за цей час не встигає перевищити критичну величину (90°), і після відключення КЗ відбувається втягування генератора в синхронізм, яке супроводжується хитаннями
ротора.
2. Заходи для підвищення динамічної стійкості
Динамічна стійкість енергосистеми характеризує здатність системи зберігати синхронізм після раптових і різких змін параметрів режиму або при аваріях в системі (коротких замиканнях, відключень часта генераторів, ліній або трансформаторів). Після таких раптових порушень нормальної роботи в системі виникає перехідний процес, по закінченні якого знову повинен настати усталений післяаварійний режим роботи [2].
Існують декілька способів підвищення стійкості:
- Контроль зміни узагальненого вектору струму на основі його диференціювання за часом.
- Контроль зміни частоти за часом на основі рішення нелінійних систем рівнянь.
- По куту із векторної діаграми на основі контролю величини опору Z, розрахованого за миттєвим значенням узагальненого струму .
Розглянемо детально метод контролю зміни узагальненого вектору струму на основі його диференціювання за часом при близьких КЗ.
Підвищення стійкості станції при близьких пошкодженнях можливо за рахунок застосування нових принципів побудування мікропроцесорних захистів. Цей принцип полягає на створенні швидкодіючого струмового захисту, який виконує аналіз миттєвих значень узагальненого вектору струму (УВС) та його першої похідної за часом, тому що саме похідна УВС має значну різницю у режимі КЗ та при хитаннях.
Принцип на основі контролю величини першої похідної УВС дозволяє істотно підвищити швидкодійність захисту в порівняні з існуючими за рахунок більш точної ідентифікації режиму на ранній стадії, адже існуючі системи, як правило, реагують на діючі значення, що може привести до затримки спрацьовування, протягом якої кут виліту ротора генератора досягне критичного значення.
3. Математичне моделювання динамічних режимів синхронного генератора
Для того, щоб довести перспективи побудови МП–захисту на основі миттєвих значень УВС і вибору її інформативних параметрів виконаємо комп’ютерне моделювання аварійних режимів, які супроводжуються порушенням динамічної стійкості.
Розрахунок миттєвих значень струмів, напруг та електромеханічних величин в перехіднім процесі виконаємо за допомогою програми PowerNet, розробленої на основі дискретних математичних моделей [8].
Розглянемо випадок виникнення асинхронного ходу.
Розрахункова схема створена на основі даних блоку 200 МВт. Генератор ТГВ-200 обладнаний тиристорною системою самозбудження з АРЗ пропорційної дії і форсуванням. Автотрансформаторний зв'язок відключено [9].
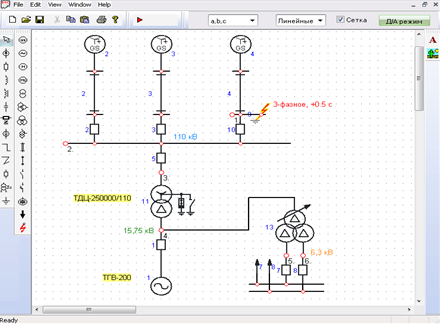
Рисунок 6 – Розрахункова схема блоку 200 МВт для аналізу асинхронного режиму
Проведемо аналіз наступного режиму:
- 0 – нормальний режим;
- 0,5 с. – виникнення 3-фазного КЗ на шинах ВРП 110 кВ;
- 1,0 с. – відключення КЗ релейним захистом.
На рис. 7 представлені осцилограми перехідного процесу, отримані за допомогою моделювання. На 1-му графіку – струм в генераторі, на 2-м – напруга на виводах генератора (фаза А), на 3-м - обертаючий момент на валу генератора (в.о.), на нижньому – відносна кутова швидкість турбоагрегату.
Величина ударного струму КЗ в даному режимі - 80 кА. Після 1 с від початку відліку пошкодження було відключено, після чого пішли хитання ротора (видно з графіка 3), і далі, стався вихід генератора з синхронізму з системою. Даний режим супроводжувався биттям струму з досить великою амплітудою (до 70 кА).
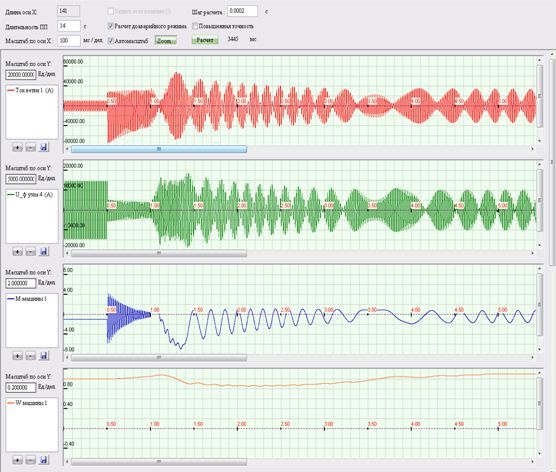
Рисунок 7 – Розрахункові осцилограми асинхронного ходу генератора при відключенні КЗ через 0,5 с (масштаб часу 100 мс/поділ)
Виконаємо аналіз поведінки генератора при використанні швидкодіючого захисту на основі вимірювання миттєвих значень УВС і його похідної, що дозволяє відключити КЗ через 0,1 с.
Значення УВС знаходимо як:
де ia, ib ,ic – відповідно струми в фазах А, В, С [7].
Далі необхідно знайти його першу похідну за часом шляхом чисельного диференціювання (використовується формула другого порядку).
Похідна УВС у режимі КЗ має значну зміну, а при хитаннях – ні, тому цей захист реагує тільки на КЗ.
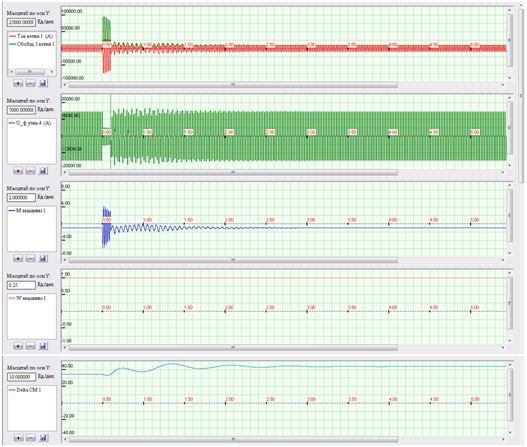
Рисунок 8 – Розрахункові осцилограми відновлення нормального режиму генератора при відключенні КЗ швидкодіючої захистом (масштаб 100 мс/поділ)
На рис. 8 (графік 1) видно характер зміни струму статора та УВС (обвідна лінія) в нормальному режимі, при КЗ, і при втягуванні генератора в синхронізм. За графіком 4 видно, що за час протікання струму КЗ механічне стан турбоагрегату (швидкість обертання) змінилася незначно. Захист відреагував на різке підвищення УВС.
Далі, після нетривалих хитань (кут вильоту ротора на графіку 5), відбулося відновлення синхронного режиму з видачею в мережу номінальної активної потужності (графік 3, обертаючий момент дорівнює -1).
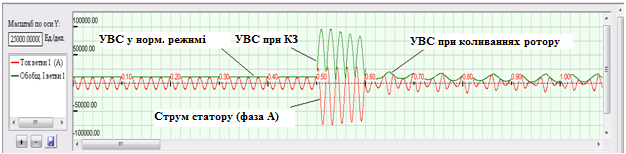
Рисунок 9 – Розрахункові осцилограми відновлення нормального режиму генератора при відключенні КЗ швидкодіючим захистом (масштаб 20 мс/поділ)
На рис. 9 представлені осцилограми струму статора та УВС у збільшеному масштабі. На даних кривих видно істотна відмінність швидкості зміни УВС у режимі КЗ і при хитаннях, у той час як миттєві і діючі значення струмів КЗ можуть відрізнятися від струмів синхронізації незначно. Завдяки цьому захист, що реагує на похідну УВС за часом, не вимагає додаткової відбудови від великих струмів при хитаннях, що підвищує її чутливість [10].
Висновки
В роботі розглянуті загальні положення питання динамічної стійкості електричних систем. Наведені три способи підвищення динамічної стійкості, один з яких розглянутий досконально.
Був запропонований новий принцип дії захистів від близьких КЗ, заснований на контролі величини швидкості зміни (першої похідної) узагальненого вектору струму. Так як сучасні струмові захисти, як правило, реагують на підвищення діючого значення струму короткого замикання, то для забезпечення селективності їх дії виникає необхідність значного зниження швидкодії захистів. Недостатня швидкодія в деяких випадках може призвести до виникнення порушення динамічної стійкості системи, зокрема асинхронному режиму. Тому швидкодіючий струмовий захист, на основі аналізу миттєвих значень УВС та його першої похідної є перспективним сьогодні. Для того, щоб це довести, було виконано математичне моделювання близького до виводів генератора короткого замикання в програмі PowerNet.
Також в даній роботі:
- За допомогою математичного моделювання перехідних процесів при близьких пошкодженнях був досліджений асинхронний режим генератора, доведена необхідність уникнення цього режиму.
- Доведено, що в ряді випадків можливе виникнення стійкого асинхронного ходу навіть при правильній роботі всіх систем захисту і автоматики.
- Вдосконалена дискретна математична модель для аналізу динамічних режимів електричної системи, на основі якої створена програма PowerNet.
При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення: грудень 2013 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Перелік посилань
- Андерсон П. Управление энергосистемами и устойчивость / Андерсон П., Фуад А.; пер. с англ. под ред. Я.Н. Лугинского. - М.: Энергия, 1980. - 568 с.
- Устойчивость энергосистемы. Общие сведения. Способы повышения устойчивости [Электронный ресурс]. – Режим доступа: http://electric-zone.ru/ustojchivost-energosistemy....
- Эксплуатация генераторов и синхронных компенсаторов [Электронный ресурс]. – Режим доступа: www.motor-remont.ru/books....
- Гамм Б.З. Исследование переходных процессов в электроэнергетической системе при учете некоторых ее элементов динамическими характеристиками / Б.З. Гамм / / Труды СибНИИЭ. - 1972. - Вып.21. - С.43-48.
- Заболотный И.П. Математическая модель для расчет динамических режимов электрической системы / И.П. Заболотный, С.А. Гришанов / / Вестник Восточноукраинского национального университета. - М.: ВНУ. - 2001. - № 3 (37). - С. 79 - 85.
- Гуревич Ю.Е. Расчеты устойчивости и противоаварийной автоматики в энергосистемам / Гуревич Ю.Е., Либова Л.Е., окинешь А.А. - М.: Энергоатомиздат, 1990. - 390 с.
- Рогозин Г.Г. Программа расчета токов трехфазных короткого замыкания в сложной электрической системе с внедрением принципов функционального моделирования / Г.Г. Рогозин, А.Ю. Коваль / / Моделирование и расчет на ЦВМ режимов энергетических систем. - М.: Наук.думка. - 1977. - С.11-20.
- Сивокобыленко В.Ф. Математическое моделирование электромеханических переходных процессов на электрических станциях / В.Ф. Сивокобыленко, М.А. Меженкова / / журнал «Электричество». - 2001. - № 4. - С.5-9.
- Сивокобыленко В.Ф. Определение параметров эквивалентных схем замещения турбогенераторов для расчетов на математических моделях / В.Ф. Сивокобыленко, М.А. Меженкова / / Сб. наук.працьДонДТУ.Серия «Электротехника и энергетика». -Донецк: ДонГТУ. - 2000. - Вып. 17. - С. 38- 41.
- Авраменко В.Н. Моделирование электроэнергетических систем - достижения и перспективы научных исследований / В.Н. Авраменко / / Техническая электродинамика. - 1997. - № 1. - С.73-80.