Вступ
1. Актуальність
2. Ціль і задачі дослідженняб результати, що плануються
3. Проектування і работа датчика сполучення
4. Особливості реалізації програми-клієнта
Висновки
Список джерел
Вступ
У наш час високих технологій практично на будь-якому великому підприємстві, будь то область електротехніки, металургії або біотехнології виникає питання про ефективне моделювання технологічних процесів і управління ними. Об'єкт, на якому протікають досліджувані технологічні процеси, є складною динамічною системою, а її моделювання дозволяє отримати найкраще рішення в питаннях управління та налагодження виробничого процесу, а також уникнути ситуацій, коли система виходить з ладу [1].
Моделювання складної динамічної системи вимагає великої обчислювальної потужності. Таку потужність забезпечує використання кластера з багатопроцесорних систем, де пов'язані з моделюванням складні обчислення виконуються паралельно.
Маючи у своєму розпорядженні точну модель якого-небудь процесу, користувач-фахівець предметної області або розробник системи, що управляє, цим процесом можуть виконувати різноманітні експерименти і дослідження для досягнення поставлених цілей (наприклад, для відладки розробленого устаткування) [2].
Проте, як правило, такий користувач має мало уявлення про те, як і в якому середовищі, працює паралельна модель. Крім того найчастіше користувач знаходиться далеко від обчислювального кластера, на якому виконується моделювання, а значить потрібна можливість видаленого доступу до мережі. Тому для роботи з моделлю потрібний проміжний інтерфейс, який був би простий і зручний у використанні і надавав би користувачеві усі необхідні засоби для вирішення його завдань. Роль такого інтерфейсу може виконувати програма-клієнт, що працює на комп'ютері.
Клієнт забезпечує не лише простоту, але й гнучкість. Маючи базу цих кластерів, що постійно оновлюється, користувач може виконувати моделювання на різних паралельних системах з різною обчислювальною потужністю та специфікою роботи [3]. Отриманий результат може оброблятися і надаватися у будь-якій бажаній формі з можливістю зберігання і аналізу попередніх дослідів. Це дозволяє значно збільшити ефективність досліджень, що проводяться, і дослідів, а також поліпшити якість обладнання, що розробляється, для управління і аналізу складних виробничих процесів.
Актуальність
На сьогодні багато підприємств, де протікають складні динамічні процеси, зацікавлені в надійній і ефективній системі управління цими процесами. Під час розробки систем управління дуже важливо максимально наблизити умови тестування системи до реальних, що необхідно для забезпечення якісної роботи таких систем.
Маючи точну паралельну модель, можна побудувати систему автоматичного управління або діагностики, маючи засоби для якісного тестування та відладки. Щоб зв'язати систему управління і модель складного динамічного об'єкту, потрібний інтерфейс, про який говорилося вище. Моделювання, в основі якого лежить три компоненти: система управління, модель і інтерфейс зв'язку системи управління з моделлю дозволяє максимально наблизити умови тестування до реальних, а саме моделювання називається напівнатурним.
Завдяки напівнатурному моделюванню можна розробити таку систему в тому вигляді, в якому вона впроваджуватиметься в реальне виробництво, виконати тестування та налагодити її роботу, після чого практично відразу задіяти на підприємстві.
Ціль і задачі дослідження, результати, що плануються
Останнім часом в якості систем управління набирають популярність мікроконтролерні системи керування (МКСК). Щоб зв'язати МКСК і паралельну модель складного динамічного об'єкту, на якому і виконуються модельні експерименти, потрібний спеціальний інтерфейс сполучення, який є набором апаратно-програмних рішень для контролю експерименту і спостереження за ним. Апаратним інтерфейсом виступає так званий датчик, що забезпечує можливість передачі даних від МКСК до комп'ютера, де встановлено розроблене програмне забезпечення для обміну даними між МКСК і паралельним моделюючим середовищем, а також є усі необхідні засоби для проведення експериментів і їх візуалізації [7].
Під час розробки датчика планується розглянути:
• Дослідження протоколу передачі даних від МСК до комп'ютера;
• Впровадження і використання протоколу в процесі обміну даними;
• Проектування і збір плати датчика з усіма необхідними компонентами.
Під час розробки програми-клієнта планується розглянути:
• Дослідження безпечного протоколу передачі даних між комп'ютерами по мережі;
• Створення дружнього і зручного інтерфейсу для роботи з паралельним моделюючим середовищем;
• Забезпечення графічних засобів моніторингу і побудови об'єкту, що моделюється.
Проектування і работа датчика сполучення
Роль моста між МКСК і керованим об'єктом виконує датчик. Розглянемо принцип роботи датчика на прикладі вентиляційної системи шахти. На рисунку 1 зображена структура системи автоматичного управління витрати повітрям в одній гілці вентиляційної системи шахти.

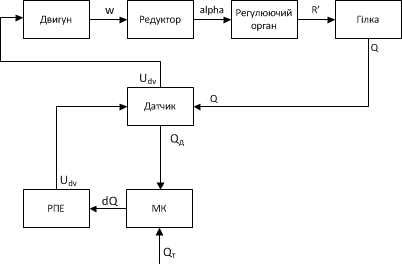
Рисунок 1 - Структура систем автоматичного керування витратою повітря
Показаний на структурі датчик передає МКСК деякий параметр Q, величину якого необхідно контролювати. МКСК аналізує отримані дані і видає значення напруги, яка через датчик подається на двигун, регулюючи тим самим рівень на який необхідно опустити штору, обмеживши або збільшивши тим самим потік повітря в шахті. Датчиком виступає мікроконтролер, який з деякою, встановленою користувачем частотою приймає дані від датчика, обробляє їх і видає відповідь в потрібному напрямі.
Під час напівнатурного моделювання датчик допомагає виконувати обмін даними між МКСК і паралельною моделлю на кластері. Безпосередньо датчик пов'язаний тільки з мікроконтролерною системою керування. Для зв'язку з моделлю на кластері використовується термінал. Користувач повинен мати можливість тестувати систему з різними параметрами і отримувати результат, як в графічному виді, так і в чисельному. Роль такого терміналу виконує комп'ютер.
Апаратна реалізація датчика складається з трьох компонент:
• центральний мікроконтролер;
• COM - USB адаптер;
• плата з роз'ємами для підключення мікроконтролерів системи керування.
Центральний мікроконтролер - мікроконтролера серії PIC18F2550. PIC - це сімейство мікроконтролерів Гарвардської архітектури, котрі розробляються компанією Microchip Technology Inc [5]. Цей мікроконтролер є високопотужним 8-бітовим контролером, який включає великий набір модулів : 10-бітовий АЦП, компаратори, ШИМ, драйвер ЖКИ, інтерфейси зв'язку USB, CAN, I2C, SPI, UART(COM), Ethernet тощо. Об'єм RAM 2 КБ, швидкість процесора 12 MIPS, пам'ять для зберігання програми 32 КБ. Діаграма контактів PIC18F2550 зображена на рисунку 2.

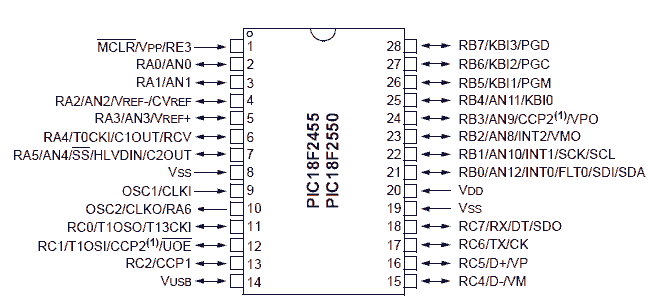
Рисунок 2 - Диаграмма контактів PIC18F2550
Таким чином, цей мікроконтролер має усі необхідні засоби для якісного виконання покладеної на нього функції : аналіз даних і обмін ними між комп'ютером(по послідовному COM- інтерфейсу) і МКСК.
Послідовний COM-інтерфейс призначений для обміну байтовою інформацією, яка передається по одному біту [6]. Цей інтерфейс ще позначається як інтерфейс стандарту RS - 232. Застосування інтерфейсу витікає з його назви: "Інтерфейс між термінальним обладнанням з обміном за послідовним двійковим кодом". Раніше послідовний COM- інтерфейс використовувався для підключення терміналу, пізніше для модему або миші. Зараз він використовується для зв'язку з апаратними засобами обчислювальних систем, супутниковими ресіверами тощо.
Особливістю послідовного COM-інтерфейсу порівняно з іншими технологіями є факт відсутності яких-небудь тимчасових вимог між передачею двох байт. Цей інтерфейс є простим з точки зору обладнання, широко поширений і має підтримку у багатьох мовах програмування та апаратних реалізаціях. Для того, щоб датчик міг відправляти і приймати інформацію від комп'ютера використовуються UART виходи мікроконтролера 18 - RX(прийом) і 19 - TX(передача).
Як правило, передача і прийом по COM-інтерфейсу на стороні комп'ютера повинна виконуватися через COM-порт [10]. Проте у наш час число персональних комп'ютерів що мають відповідний порт усе менше і менше, тому слід передбачити передачу даних через інтерфейс USB. Для цього використовується спеціальний COM - USB адаптер, що дозволяє на програмному рівні працювати з послідовним COM-інтерфейсом, тоді як на фізичному рівні використати інтерфейс USB. У основі адаптера лежить мікросхема FT232R. Схема підключення FT232R зображена на рисунку 3.

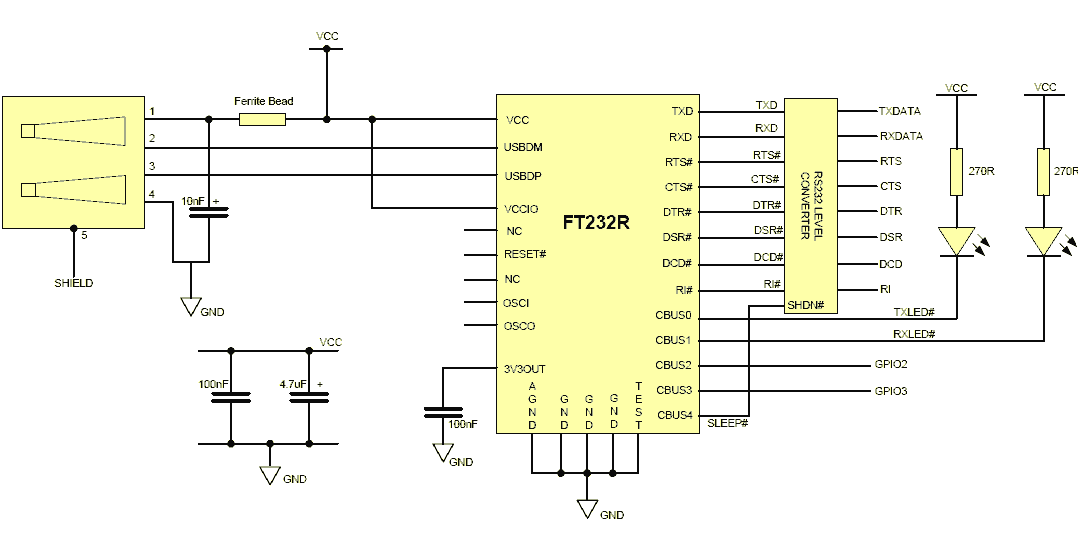
Рисунок 3 - Схема підключення FT232R
Оскільки окрім комп'ютера датчик також з'єднуватиметься з МКСК, необхідно розробити плату з роз'ємами для підключення мікроконтролерів системи керування. Плата складається з роз'єму для центрального мікроконтролера, роз'єму для FT232R адаптера, і шести роз'ємів до яких підключатимуться управляючі мікроконтролери МКСК [9]. Принципова схема плати зображена риснуку 4. Розроблений датчик зображений на рисунку 5.

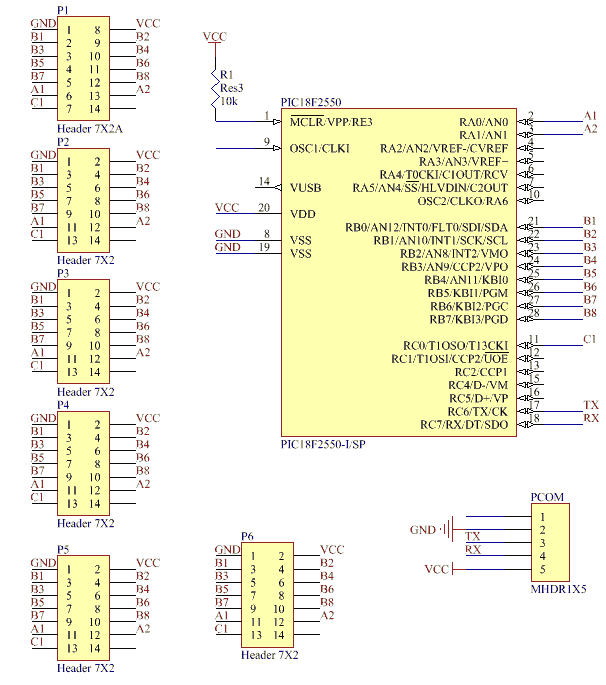
Рисунок 4 - Принципіальна схема плати сполчення датчика з МКСК

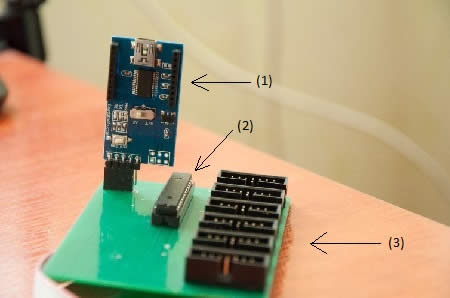
Рисунок 5 - Зображення датчика з COM-USB адаптером (1), центральним мікроконтролером (2) та роз'ємами для МКСК (3)
Особливості реалізації програми-клієнта
Програма-клієнт, запущена на комп'ютері дозволяє виконувати моделювання складного динамічного об'єкту, працюючи з паралельним моделюючим середовищем і системою керування на мікроконтролерах. Перед початком моделювання необхідно підключити МКСК до комп'ютера і задати параметри його роботи. Далі користувачеві пропонується за допомогою графічного редактора схематично побудувати модельований динамічний об'єкт або використати готовий з бази даних.
Наступним кроком необхідно запустити моделювання динамічного об'єкту в паралельному моделюючому середовищі і забезпечити можливість обміну даними між середовищем та МКСК. Паралельне моделююче середовище знаходиться, як правило, на видаленому багатопроцесорному кластері. Управління кластером і доступ до нього виконується за допомогою сервера, як правило, під управлінням операційної системи Linux. Такий підхід дозволяє видалено, за допомогою мережі, отримувати доступ до ресурсів кластера широкому колу користувачів, тобто користувач не повинен знаходитися у безпосередній близькості до кластера. На рисунку 6 зображений процес обміну даними під час моделювання.


Рисунок 6 - Процес обміну даними під час моделювання (Анімація: 6 кадрів, затримка між кадрами 1.5 с, кількість циклів 5, розмір 500х300, 23.7 КБ)
Проте потрібний надійний і гнучкий інтерфейс, по якому надаватиметься доступ до ресурсів кластера. Для цієї мети дуже часто використовується мережевий протокол Secure Shell(SSH), який дозволяє виконувати захищене, видалене управління комп'ютером і передачу йому даних. Формально SSH - це мережевий протокол прикладного рівня, що дозволяє робити видалене управління операційною системою і тунелювання TCP-з'єднань(наприклад, для передачі файлів [4]). SSH протокол шифрує увесь трафік, у тому числі паролі, що передаються, з можливістю вибору алгоритмів шифрування. SSH-клієнти і SSH-сервери доступні для більшості мережевих операційних систем.
Операційна система Linux має встановлений SHH- сервер, що дозволяє отримати доступ до системи за наявності пароля і логіна. SSH також дозволяє передавати по незахищеному середовищу практично будь-який інший мережевий протокол. Завдяки цьому можна не лише видалено працювати на комп'ютері через командну оболонку, але і передавати звуковій або відео потік. Протокол SSH складається з трьох основних компонент. Протокол транспортного рівня забезпечує аутентифікацію серверів, конфіденційність і цілісність [8]. Протокол аутентифікації користувачів використовується на сервері для перевірки повноважень клієнтів. Протокол з'єднання забезпечує мультиплексування шифрованого тунеля в декілька логічних каналів.
Висновки
На момент написання магістерської роботи дослідження, що проводяться в її рамках, носили не лише теоретичний характер, але були підтверджені на програмному та апаратному рівнях. Була виконана розробка і реалізація датчика, після чого була написана частина програми-клієнта з метою протестувати його роботу. Крім того був отриманий досвід роботи з SSH протоколом. Тестування виконувалося з підключенням реальної керуючої мікроконтролерної системи. При написанні цього реферату магістерська робота ще не завершена. Остаточне завершення: грудень 2013 року. Повний текст роботи і матеріали по темі можуть бути отримані у автора або його керівника після вказаної дати.
Список джерел
- Святний В.А. Паралельне моделювання складних динамічних систем // Моделирование - 2006: Международная конференция. Киев, 2006 г. - Киев, 2006. - С. 83-90.
- Святний В.А. Стан та перспективи розробок паралельних моделюючих середовищ для складних динамічних систем з розподіленими та зосередженими параметрами / В.А.Святний, О.В.Молдованова, А.М.Чут.
- Конспект лекций по курсу «Параллельные распределенные вычисления», В. А. Святный, 2010.
- Secure Shell [Електронне джерело]
Режим доступу: www.ru.wikipedia.org/wiki/SSH - PIC микроконтроллеры [Електронне джерело]
Режим доступу: www.ru.wikipedia.org/wiki/PIC - Последовательный COM-порт [Електронне джерело]
Режим доступу: www.en.wikipedia.org/wiki/Serial_port - Святний В.А. Проблеми паралельного моделювання складних динамічних систем.
- SSH.NET Library [Електронне джерело]
Режим доступу: www.sshnet.codeplex.com - PIC RS232 Serial Communication example [Електронне джерело]
Режим доступу: www.mcuexamples.com/PIC-Serial-Communication.php - Serial Port in C# [Електронне джерело]
Режим доступу: www.msdn.microsoft.com/ru-ru/library/system.io.ports.serialport.aspx