
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження, заплановані результати
- 3. Огляд досліджень та розробок
- 3.1 Огляд міжнародних джерел
- 3.2 Огляд національних джерел
- 3.3 Огляд локальних джерел
- 4. Віртуальна модель системи реального часу
- 5. Аналіз результатів імітаційних досліджень
- 6. Розробка системи збору та аналізу даних на базі плати FPGA Xilinx Spartan-3E
- Висновки
- Перелік посилань
Вступ
Система реального часу – це апаратно-програмний комплекс, що реагує за передбачуваний час на непередбачуваний потік зовнішніх подій. СРЧ повинна встигнути відреагувати на подію, що виникла на об'єкті, протягом часу, критичного для цієї події, величина якої визначається об'єктом і самим подією, і, природно, може бути різною, але час реакції системи має бути передбачено при створенні системи. Відсутність реакції в передбачений час вважається помилкою для систем реального часу, система повинна встигати реагувати на події, що відбуваються одночасно. Навіть якщо дві або більше зовнішніх події протікають одночасно, система повинна встигнути зреагувати на кожну з них протягом інтервалів часу, критичних для цих подій.
LabVIEW (англ. Laboratory Virtual Instrumentation Engineering Workbench) – це середовище розробки та платформа для виконання програм, створених на графічній мові програмування G фірми National Instruments (США). Перша версія LabVIEW була випущена в 1986 році для Apple Macintosh, у даний час існують версії для UNIX, Linux, Mac OS, а найбільш розвиненими і популярними є версії для Microsoft Windows.
Вихідні тексти переносні, а програми будуть виглядати однаково у всіх системах. Код, що згенерував LabVIEW також може бути виконаний на Windows Mobile або PalmOS (на даний момент підтримка PalmOS припинена). Ця мова може з успіхом використовуватися для створення великих систем, для обробки текстів, зображень і роботи з базами даних. Інженери і вчені використовують NI LabVIEW для розробки вимірювальних систем, випробувальних стендів і систем управління. Крім самої можливості програмування середовище LabVIEW надає в розпорядження користувача широкий спектр інструментів і бібліотек: від інтерактивних майстрів налаштування і користувальницьких інтерфейсів до вбудованих компілятора, компонувальника та засобів відлагодження.
1. Актуальність
Системи реального часу – надзвичайно важливий напрямок сучасних технологій. Достатньо сказати, що всі автоматизовані комплекси, від яких залежать життя і здоров'я людей, є системами реального часу. Роль таких систем постійно зростає, оскільки все більше технічних процесів вивчається з достатньої для автоматизації глибиною.
Проте розробка таких систем є, як правило, трудомісткою задачею, що вимагає значних витрат часу та матеріальних витрат. До того ж розроблена система, як правило, є вкрай негнучкою і призначена для вирішення вузького кола задач без можливості у стислі терміни перестроїти систему під нові технічні вимоги.
2. Мета та задачі дослідження, очікувані результати
Метою даної магістерської роботи є розробка методики автоматизації, а відповідно – прискорення розробки різних за призначенням систем реального часу та скорочення витрат на їх реалізацію. З цією метою у роботі пропонується використання ПЛІС та спеціалізованого середовища розробки LabVIEW, що разом відкривають широкі інженерні можливості.
З одного боку за допомогою мови програмування G можна явно задавати апаратну структуру системи, що розроблюється, потокове програмування передбачає легкість реалізування паралельно виконуваних блоків операцій, а багата бібліотека вбудованих операторів дозволяє сконцентруватися на реалізації саме проблемної задачі. Все це зумовлює більшу, ніж за використання класичних методів розробки подібних систем (VHDL, С, Assembler, Matlab та інш.), швидкість розробки програмно-апаратного продукта.
Використання ПЛІС для реалізації системи реального часу або системи, наближеної до реального часу, відкриває можливість використовувати лише один фізичний пристрій для багатьох практичних, науково-дослідницьких цілей, оскільки перепрограмування ПЛІС під нову задачу за наявністю готового рішення її реалізації займає лічені секунди.
Пакет засобів LabVIEW підтримує різноманітні цифрові та аналогові пристрої для організації взаємодії персонального комп’ютера та досліджуваного об’єкта. Проте до списку FPGA-плат, що підтримуються середовищем, входять лише фірмові продукти National Instruments – плати CompactRIO, що мають багато переваг, серед яких: значна кількість логічних вентелів, наявність контролерів реального часу, висока надійність та якість виконання продукту – проте все це зумовлює високу вартість плат лінійки CompactRIO. Відтак компанія National Instruments додала підтримку плат Xilinx Spartan-3e, яка і використовується у даній роботі.
Отже можна виділити наступні задачі дослідження у рамках даної теми:
- Аналіз та дослідження методів програмування потоковою мовою G у межах середовища LabVIEW;
- Розробка багатопоточної моделі системи реального часу та її елементів;
- Дослідження засобів роботи у середовищі LabVIEW з ПЛІС;
- Дослідження різних конфігурацій систем реального часу;
- Розробка методики використання пакету засобів LabVIEW задля конфігурування FPGA-плат;
- Апробація розроблених рішень в умовах лабораторного практикума та в умовах, наближених до виробничих.
Очікуваними результатами роботи є розроблена віртуальна модель системи реального часу та комплексна система збору та аналізу даних у складі FPGA та хоста з графічним інтерфейсом у вигляді звичайного персонального комп’ютера, що пов’язані між собою за інтерфейсом USB.
3. Огляд досліджень та розробок
Оскільки у наш час в індустріальній та науковій сферах майже не залишилося технічних процесів, які не мають засобів автоматизації, питання розробки систем автоматизації, зокрема систем збору та аналізу даних доволі часто розглядається у наукових роботах та промислових проектах у багатьох країнах світу. Розробка ж таких систем, орієнтована на застосування у FPGA-рішеннях, є ще більш перспективним напрямком, оскільки апаратна частина систем реального часу, орієнтованих на збір та обробку інформації з зовнішніх джерел, зазвичай має низьку гнучкість використання, високу вартість та значний термін розробки. Використання ж у ролі головного апаратного ядра таких систем FPGA-плати, дозволяє не тільки значно скоротити терміни розробки систем, але й за необхідністю реконфігурувати таке рішення у інший, раніше розроблений проект за декілька секунд.
3.1 Огляд міжнародних джерел
Головним джерелом інформації щодо техніки програмування LabVIEW, розробки віртуальних приборів, орієнтованих на виконання на FPGA-рішеннях National Instruments та Xilinx Spartan-3E, є розділ Developer’s Zone головного інтернет-ресурсу National Instruments [1], на якому можна не тільки знайти вказівки та навчальний матеріал, але й приклади готових проектів за різноманітними тематиками.
Також джерелом інформації щодо введених у експлуатацію наукових та промислових проектів за даної тематикою є буклети з міжнародних конференцій “NI Days”, що розміщені у вільному доступі на ресурсах National Instruments. На конференціях “NI Days” розглядаються найновітніші розробки лідерів галузі тестування та верифікації приладів, розробки систем автоматизування, медіасистем та інш., які реалізовано за допомогою програмної та апаратної продукції National Instruments. Наприклад, на конференції “NI Days” у Великобританії 2008 року [2], дві статті присвячено саме розробці систем збору та аналізу даних на базі FPGA плат NI CompactRIO, що вже введені в експлуатацію та показують високі результати у комерційних проектах військово-промислового комплексу США та автоіндустрії.
Значна кількість учбових посібників англомовних авторів, таких як "Advanced Programming Techniques, Second Edition"авторів Rick Bitter, Taqi Mohiuddin, Matt Nawrocki [3], "LabVIEW Digital Signal Processing and Digital Communications"автора Cory L. Clark [4], "Analog Electronics with LabVIEW"автора Kenneth L. Ashley [5] та інші, є масивним джерелом знань з ефективної розробки різноманітних LabVIEW-продуктів, що містять багато недекларованих виробником особливостей LabVIEW-проектування.
Конференції National Instruments проводяться і в Росїї, де також представлені сучасні розробки у даній сфері[6]. Взагалі ж у Росії рух використання LabVIEW є значно більш розвинутим, ніж в Україні. Це зумовлює значну кількість підручників, посібників та статей на дану тематику. Такі підручники як "Автоматизация измерений, контроля и испытаний" авторів Мищенка С.В., Дівіна, та інш. [7], "Автоматизация физических исследований и эксперимента – компьютерные измерения и виртуальные приборы на основе LabVIEW 7" Бутиріна П.А. [8], "Логическое управление. Методы аппаратной и программной реализации"Шаліти О.О. [9], "Цифровая обработка сигналов в LabVIEW"під ред. В. П. Федосова [10], "Цифровая обработка сигналов с помощью платы АЦП и программного комплекса LabView"С.Д. Мещерякова [11] інші є джерелом досвіду досліджень та розробок компетентних авторів LabVIEW-продуктів.
3.2 Огляд національних джерел
Нажаль, у межах України використання LabVIEW задля розробки систем реального часу, а також конфігурування FPGA-плат є не дуже поширеним, а відтак кількість інформації цієї тематики є дуже обмеженою і, зазвичай лише дублює іноземні матеріали. Проте корисними у рамках даної теми є статті Тесленко В.А. [12], Денисенко В.В. та Халявко А.Н. [13] щодо застосування різнотипних датчиків у системах збору даних та керування. Також слід згадати про курс лекцій з програмування у середовищі LabVIEW на ресурсі picad.com.ua [14].
3.3 Огляд локальних джерел
Серед магістрів ДонНТУ ще ніхто не займався даною темою, і в цілому використання LabVIEW задля вирішення практичних задач є непоширеним у ВНЗ України.
Проте слід згадати про роботу з розробки систем реального часу на FPGA-платах за використання VHDL та засобів фірм-виробників цільових плат. Так, у статті “Разработка системы реального времени на базе Xilinx XC3S500E Spartan-3E FPGA” Волошина Д.Н [15] розглядаються питання верифікації вбудованих систем-на-кристалі (СнК) на базі FPGA на маршруті їх проектування. Проводиться оглядовий аналіз існуючих методів верифікації систем-на-кристалі і цифрових пристроїв в цілому. На підставі огляду формується перелік актуальних проблем при верифікації СнК і можливих шляхів їх подолання з метою створення якісно нового підходу до верифікації FPGA-проектів.
4. Віртуальна модель системи реального часу
Розробкою віртуальної моделі досягаються декілька важливих задач: по-перше у ході роботи над моделлю було засвоєно основні прийоми та вивчена специфіка роботи у середовищі LabVIEW, по-друге у ході розробки моделі досліджена робота супервізора системи, обробників задач, обробка переривань та інш., а також алгоритми їх роботи, по-третє вона включає у себе інтерфейс користувача системи, що виконує типові функції, які стануть у нагоді при розробці хоста реальної системи, окрім того система має структурні елементи, що можуть бути реалізовані апаратно за допомогою модуля LabVIEW FPGA на платі (супервізор, обробник переривань та інш.). Таким чином модель є основою для реалізації системи реального часу на ПЛІС та хоста з інтерфейсом користувача на персональному комп’ютері.
Центральне місто багатозадачної системи реального часу відведено супервізору. Для виконання своїх функцій він обробляє параметри задач з частотою роботи, що задається системним таймером. Оскільки за перевищення максимального часу виконання задачі присвоюється штрафна санкція, і її робота примусово завершується, супервізор має за необхідністю передавати керування задачі з черги на виконання у момент зняття поточної задачі, а не через такт. Відтак супервізор має працювати з частотою, що перевищує частоту виконання задач. У системі, що розроблюється, Δtсист становить 1с, оскільки модель носить тестовий характер і реалізується у операційній системі MacOS, у основі якої лежить ядро-UNIX, що не є операційною системою реального часу. Супервізор же спрацьовує з інтервалом у 0.1с, чим забезпечується виконання вищезазначеної функції.
У відповідності до функціональних можливостей, можна виділити три логічних блока функцій супервізора, які і реалізують ці можливості:
- Блок реакції на зовнішні прапори;
- Блок керування станами задач у відповідності до поточного стану та планового часу виклику на виконання;
- Блок контролю тривалості сеансу роботи задачі та присвоєння штрафних санкцій.
Супервізор не реагує на зовнішні події безпосередньо. Відтак необхідним компонентом СПЗ, окрім супервізора, є блок первинних обробників подій. Первинні обробники ідентифікують події від зовнішніх пристроїв системи (діяльність яких симулюють клавіатура та миша – за допомогою них користувач у любий випадковий момент часу викликає відповідні переривання) та формують відповідні прапори у області прапорів, які і обробляються диспетчером задач.
Як вже згадувалося раніше, імітаційна модель СРЧ виконана з використанням платформи LabVIEW. Програма, написана в середовищі LabVIEW, називається віртуальним приладом (ВП або Virtual Instrument – VI). ВП складається з чотирьох частин: лицьової панелі, блок-діаграми, іконки і сполучної панелі.
У LabVIEW інтерфейс користувача – лицьова панель створюється за допомогою елементів керування (кнопки, перемикачі тощо) і відображення (графіки, світлодіоди та ін.). Після цього на блок-діаграмі ВП здійснюється програмування з використанням графічних реалізацій функцій для керування об'єктами на лицьовій панелі.
LabVIEW використовується для програмування різних DAQ-пристроїв, систем контролю зображення і руху, апаратних засобів, що мають інтерфейси типу GPIB, VXI. PXI. RS-232 і RS-485. LabVIEW має вбудовані можливості для роботи в комп'ютерних мережах Інтернет, використовуючи LabVIEW Web Server і програмні стандарти TCP / IP і Active X.
Якщо передбачається використання ВП усередині іншого ВП, ВП у складі іншого ВП іменується віртуальним підприладом (subVI). Для використання віртуального підприлада часто необхідно визначити вхідні і вихідні термінали для введення вихідної інформації і виведення оброблених даних в основний ВП. Для конфігурування терміналів використовується сполучна панель, на якій вводиться відповідність конкретних елементів керування з вхідними терміналами та елементів відображення з вихідними терміналами.
В межах основного ВП віртуальний підприлад відображається відповідно до створеної для нього іконки, яка створюється при збереженні створеного ВП.
Всі блоки виконуються паралельно у різних потоках. Структурно супервізор складається з ряду алгоритмічних кадрів:
- Виконання аналізу прапорів зовнішніх подій від клавіатури та миші, за якими встановлюються відповідні параметри задач. Блок-діаграма першого кадру зображена на рис.1.
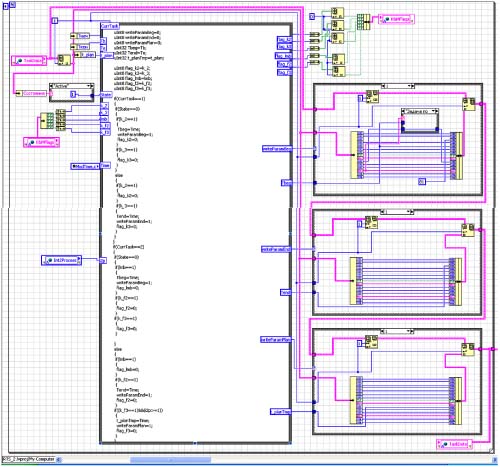
Рисунок 1– Блок-діаграма першого кадру супервізора
- Аналіз завершення інтервалу активності задач та прапорів завершення
роботи задач, формування масиву параметрів задач, впорядкованого за пріоритетами задач.
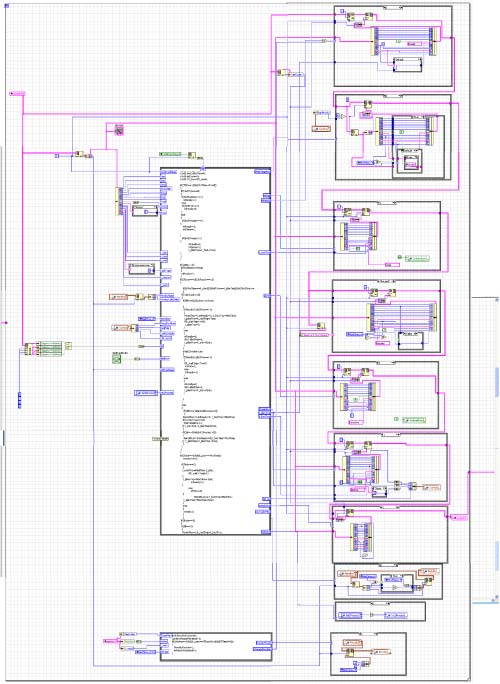
Рисунок 2– Блок-діаграма другого кадру супервізора
-
Аналіз параметрів РЧ та прапорів: формування станів задач, планового
часу виклику, запис фактичного часу виклику, визначення необхідності накладання штрафу за перевищення часу виконання задачі,заповнення полів інформаційної структури про задачу, що виконується, визначення наявності необроблених переривань та зменшення значення лічильника необроблених переривань у разі завершення роботи задачі за перериванням (задачі №3). Блок-діаграма третього кадру зображена на рис. 3
Рисунок 3– Блок-діаграма третього кадру супервізора
Розроблену LabVIEW-програму можна розділити на три функціональні блоки: основний блок, блок первинної обробки зовнішніх подій, блок імітації задач.
Основний блок представляє собою часовий цикл з тривалістю ітерації 0.1с, у якому виконується відлік часу моделювання, виклик супервізора та керування елементами інтерфейсу програми.
Блок імітації задач містить чотири часових цикли з тривалістю ітерації 1с, кожний з яких імітує роботу прикладних задач реального часу. Всі задачі є незалежними одна від одної та виконується паралельно у різних потоках.
У блоці первинної обробки зовнішніх подій виконується фіксація подій з зовнішніх пристроїв – миші та клавіатури.
5. Аналіз результатів імітаційних досліджень
Перше дослідження моделює ситуацію, коли задачі виконуються у плановому режимі, не перекриваючи планові часи виклику інших задач.
На рис. 4 зображено результати моделювання №1.
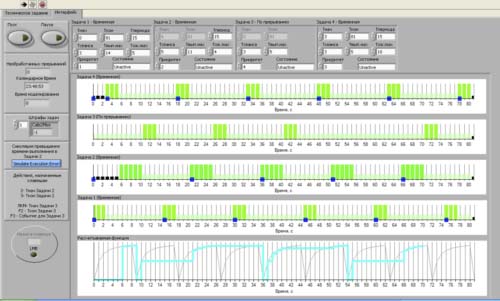
Рисунок 4 – Результати моделювання №1
Як видно, планові часи виклику задач за часом обчислюються вірно. У розраховані відносно фактичного часу виклику значення планового часу виклику задачі отримують керування і звершують свою роботу через Тсеанса секунд після фактичного часу початку роботи. Інтервал активності задачі №2 розпочато натисненням клавіші "2», інтервал активності задачі №3 – натисненням лівої кнопки миші. О 81-ій секунді моделювання інтервали активності задач було завершено згідно із значенням Ткін. Задача №2 успішно виконувала і виводила на форму обрахування заданої функції у моменти своєї роботи. У моменти часу 11, 26, 41, 71 до системи надходило переривання, що ініціалізувало початок виконання задачі №3.
На рис. 5 зображено результати моделювання №2.

Рисунок 5 – Результати моделювання №2
У даному моделюванні поширеною була ситуація, коли задачі не отримували керування через те, що система була зайнята у момент часу, який відповідав їх плановому часу виконання. Відтак задачі переходили у стан очікування виконання. Поширені також ситуації, коли декілька задач є претендентами на запуск у однаковий момент часу (1 та 2 задачі у момент часу 0, 1 та 2 у момент часу 44, 4 та 2 у момент часу 63). У такій ситуації задача з вищим пріоритетом розпочинає виконання, а задача з меншим залишається у стані очікування. Розрахунок планового часу запуску виконується відносно фактичного часу запуску задачі на виконання.
Робота режиму очікування задачі (рис. 5). Задачі 1 та 2 отримують Тпоч одночасно в момент 1 сек. На виконання надходить задача 2, а перша отримує стан "Очікування виконання». Після звільнення процесорного ресурсу (момент часу 5 сек) задача 1 отримує керування.
На рис. 6 зображено результати моделювання №3.
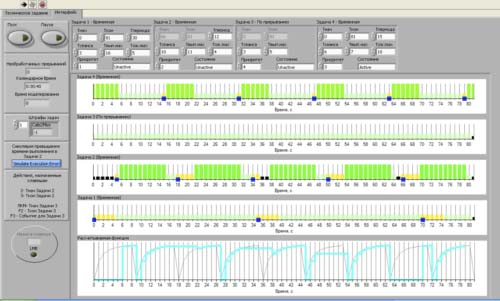
Рисунок 6 – Результати моделювання №3
У даному моделюванні задача 1 жодного разу не отримала керування через те, що всі три рази у момент Тплан виконувалася інша задача, або розпочинала виконання задача з вищим пріоритетом, і в усіх випадках вона перевищувала час максимального очікування і супервізор знімав її з черги на виконання, що зумовлено технічним завданням.
У наступному моделюванні розглядається ситуація перевищення часу виконання задачею 2. В процесі моделювання користувач натиснув клавішу симуляції помилки перевищення часу виконання у задачі 2, через що вона не закінчувала своєї роботи допоки тривалість її роботи не перевищувала максимального часу роботи. Тоді супервізор накладає на задачу штраф, що виражається у трикратному блокуванні її виклику за ініціюючою подією (час моделювання дорівнює значенню Тплан), що і відображено на інтерфейсі користувача на рис. 7 зображено результати моделювання №4.
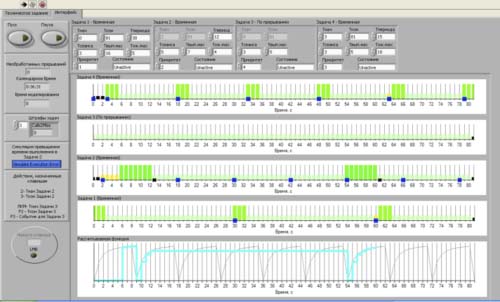
Рисунок 7 – Результати моделювання №4
На рисунку 8 наведено результати моделювання №5.
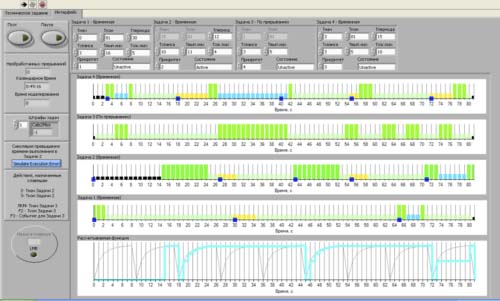
Рисунок 8 – Результати моделювання №5
У попередніх моделюваннях переривання надходило лише у той час, коли система була вільна. У моделюванні №5 переривання надходить у момент виконання іншої задачі. Оскільки обробка переривань у розробленій системі негайна, то задача, що виконується, призупиняється на час обробки всіх необроблених переривань. Той час, що задача перебуває у паузі, не вважається часом очікування і задача, що тривалий час призупинена, не штрафується супервізором. Коли ж переривання оброблено, призупинена задача оновлює свою роботу і працює відведений їй час. Якщо наступний плановий виклик приходиться на час, коли задача призупинена, плановий час виклику перераховується додаванням до попереднього значення Тперіоду задачі. Те ж саме відбувається, якщо Тплан задачі приходиться на момент, коли задача допрацьовує час, що їй залишився після призупинення.
6. Розробка системи збору та аналізу даних на базі плати FPGA Xilinx Spartan-3E
На наступному етапі магістерської роботи передбачається апаратна реалізація системи реального часу на базі FPGA-рішення за допомогою тулкіта LabVIEW FPGA.
Головною перевагою систем збору і аналізу даних, побудованих на рішеннях FPGA, є можливість реконфігурування системи, оскільки гнучкість платформи дозволяє охопити широке коло завдань, від збору і зберігання даних і складних алгоритмів аналізу до високошвидкісного управління в масштабі наносекунд.
На основі FPGA можуть бути створені системи, що вирішують такі завдання, як бортовий збір даних, шумовий і віброакустичний аналіз, керування обладнанням. Автономність такої системи є затребуваною у багатьох наукових і промислових проектах:
- Збір та обробка – високошвидкісне управління переміщеннями, керування періодичними процесами, дискретне управління.
- Керування важкими верстатами – обробка сигналів в реальному часі і керування силовою електронікою і гідравлічними системами.
- Напівпровідникова та біомедична промисловість – специфічне управління переміщеннями і обробка зображень, контроль подачі сировини.
- Моніторинг стану обладнання – аналіз зносу, контроль охолодження наявності мастила, відсутність небезпеки пожежі і т.п.
- Мобільні/портативні системи шумового і віброакустичного аналізу – аналіз шумів, вібрацій, динамічний аналіз сигналів.
- Розподілений збір даних – центральний контролер з розподіленими вузлами введення-виведення, підключеними по дротових або бездротових мереж.
Така система, як правило, має архітектуру, що складається з трьох процесорів: на комп'ютері з ОС Windows, на контролері реального часу і ядро ПЛІС. Враховуючи високу вартість рішень National Instruments, в роботі використовується плата Xilinx Spartan-3E, яка рекомендована National Instruments для виконання некомерційних проектів у навчальних закладах. Оскільки плати Spartan-3E, на відміну від плат серії CompactRIO, не мають бортового контролера реального часу, передбачувана структура розроблюваної системи включає лише процесор хост-станції і ядро ПЛІС.
Логіка, функції введення-виведення, тактування, тригерінг та синхронізація реалізуються в ПЛІС на апаратному рівні і повністю визначаються користувачем при конфігурації. Ядро ПЛІС безпосередньо пов'язане з модулями вводу-виводу, що забезпечує точність і гнучкість тактування, тригерінгу і синхронізації. Модулі вводу-виводу містять вбудовані засоби попередньої обробки сигналів, перетворювачі ЦАП та АЦП. Дані між ПЛІС і модулями передаються у цифровому вигляді.
Передбачається, що апаратний модуль на ПЛІС приймає і накопичує інформацію з датчиків із заданою частотою, періодично посилаючи пакети інформації по USB-інтерфейсу на хост-програму на персональному комп'ютері, яка візуалізує одержувані дані, зберігає їх в лог-файл і забезпечує інформаційну взаємодію користувача з платою через графічний інтерфейс. Таким чином передбачається розробка системи, спрощена ілюстрація роботи якої наведена на рис. 9
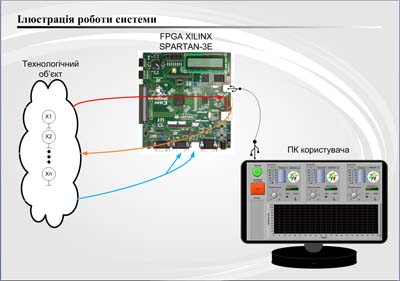
Рисунок 9 – Ілюстрація роботи системи
При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення: грудень 2013 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після вказаної дати.
Перелік посилань
- National Instruments – Developer's Zone [Электронный ресурс]. – Режим доступа: http://zone.ni.com/dzhp/app/main.
- NIDays08 – Worldwide Graphical System Design Conference [Электронный ресурс]. – Режим доступа: ftp://ftp.ni.com/pub/branches/uk/nidays2008/NIDaysBooklet.pdf – pp. 31-34, 41-42, 46-47.
- Rick Bitter, Taqi Mohiuddin, Matt Nawrocki. Advanced Programming Techniques, Second Edition – Boca Raton: CRC Press, 2006. – 500 p.
- Cory L. Clark. LabVIEW Digital Signal Processing and Digital Communications – New York: McGraw-Hill, 2005. – 205 p.
- Kenneth L. Ashley. Analog Electronics with LabVIEW – Upper Saddle River, NJ: Prentice Hall, 2003. – 432 p.
- Деcятая международная научно-практическая конференция. Инженерные, научные и образовательные приложения на базе технологий National Instruments 2011 [Электронный ресурс]. – Режим доступа: http://www.labview.ru/Conference2011/Sbornik%20trudov%20konferencii%202011%20electr.pdf – pp. 245-246, 268-273.
- Мищенко С.В., Дивин А.Г., Жилкин В.М., Пономарев С.В., Свириденко А.Д. Автоматизация измерений, контроля и испытаний – Т.: издательство ТГТУ, 2007. – 116 с.
- Бутырин П.А. Автоматизация физических исследований и эксперимента: компьютерные измерения и виртуальные приборы на основе LabVIEW 7 – М.: ДМК Пресс, 2005. – 264 с.
- Шалыто А.А. Логическое управление. Методы аппаратной и программной реализации – СПб.: Наука, 2000. – 780 с.
- Федосов В.П., Нестеренко А.К. Цифровая обработка сигналов в LabVIEW – М.: ДМК Пресс, 2007. – 456 с.
- Мещеряков С.Д. Цифровая обработка сигналов с помощью платы АЦП и программного комплекса LabView – М.: Московский государственный университет им. М. В. Ломоносова, 2004. – 44 с.
- Тесленко В.А. Подключение датчиков к ПК. Учебный практикум – К.: НТУУ "КПИ", 2004. – 7 с.
- Денисенко В.В., Халявко А.Н.Термометры сопротивления, Термисторы и Термопары. Учебный практикум – Таганрог: НИЛ АП, 2004. – 5 с.
- Уроки по LabVIEW [Электронный ресурс]. – Режим доступа: http://www.picad.com.ua/lesson.htm.
- Волошин Д.Н. Разработка системы реального времени на базе Xilinx XC3S500E Spartan-3E FPGA. – Інформатика і комп’ютерні технології (ІКТ-2011) / Матерiали VII мiжнародної науково-технiчної конференцiї студентiв, аспiрантiв та молодих вчених – Донецьк, ДонНТУ – 2011, с. 44-47.