
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Обзор исследований и разработок
- 3. Математическое описание СДПМ
- 4. Методы идентификации
- 4.1 Оценщик на основе измеренных напряжений и токов статора
- 4.2 Оценщик на основе адаптивной системы с эталонной моделью (АСЭМ)
- Выводы
- Список использованных источников
Введение
Синхронные двигатели с постоянными магнитами (СДПМ) используются в широком диапазоне мощностей от мВт до сотен кВт. Так же были приняты попытки применить постоянные магниты к двигателям мощностью более 1 МВт. Таким образом, применение СДПМ возможно в большом количестве областей, от шаговых моторов для наручных часов и промышленных приводов для станков до больших СДПМ для корабельных силовых установок [1]. Основными сферами применения синхронных двигателей с ПМ являются [2]: промышленность, общественное применение, офисное оборудование [3], средства передвижения, оборонительные силы, аэрокосмическая, медицинское и оздоровительное оборудование, электроинструмент, системы возобновляемой энергии, оборудование для исследований и экспериментов.
Особенностью СДПМ является в наличие постоянных магнитов в роторе, которые генерируют постоянное магнитное поле в отличии от короткозамкнутого ротора в асинхронных машинах, что дает ряд преимуществ для разработчиков двигателя, производителей и конечных потребителей. Эти преимущества включают компактную форму с высокой плотностью крутящего момента и меньшим весом, высокий статический момент на большом диапазоне скоростей, низкий момент инерции ротора, высокие динамические характеристики, высокая эффективность работы из‐за малых тепловых потерь роторе, низкие пульсации момента, более высокая эксплуатационная надёжность по сравнению с двигателями постоянного тока, хороший cos φ.
Недостатками СДПМ являются растущие цены на редкоземельные материалы из‐за определенных экономических факторов на мировом рынке, хотя недавние открытия редкоземельных магнитов в США и других странах может значительно повлиять на данную ситуацию в будущем, наличие противо‐ЭДС, создаваемого постоянными магнитами, обязательное наличие датчика положения ротора для применения в поле‐ориентированном управлении.
1. Актуальность темы
Основным из вышеперечисленных недостатков, является датчик положения, который уязвим к электромагнитным помехам, имеет ограниченный диапазон рабочих температур, увеличивает габариты двигателя, ухудшает общую эксплуатационную надежность привода.
Устранение электромеханического датчика удешевляет аппаратную часть, уменьшает сложность установки системы (отсутствие дополнительных кабелей), снижает инерционность системы и чувствительность привода к шумам, увеличивает робастность и надежность.
В общем методы оценки положения вала СДПМ можно разделить на:
- Неадаптивные:
- Оценка на основании измеряемых напряжений и токов статора;
- Оценка на основании потокосцепления;
- Оценка на основании противо‐ЭДС.
- Адаптивные:
- Оценка на основании системы с адаптивной моделью;
- Оценки с помощью наблюдателей состояния;
- Инжекция сигналов: метод оценки позиции ротора с помощью введения высокочастотной составляющей в напряжение (ток) статора и вычисление эффекта анизотропии машины на соответствующую составляющую напряжения (тока) статора.
- Искусственный интеллект: представлен нейронными сетями, системами нечеткой логики и нечеткими нейронными сетями. Данные методы не нуждаются в математической модели привода, обладают хорошими свойствами подавления шумов, могут быть легко расширены и модифицированы, отличаются робастностью к вариациям параметров и меньшими требованиями к вычислительным мощностям [4].
Магистерская работа посвящена исследованию актуальной научной задачи бездатчикового векторного управления СДПМ. Полученные результаты будут проверены путем математического моделирования в пакете MATLAB\Simulink.
2. Обзор исследований и разработок
Бездатчиковое управления СДПМ является перспективным направлением для исследований, что подтверждается работами ученых по всему миру. Разработки по данной теме начались еще в 80‐х годах ХХ века. Особое внимание данной теме уделяется в Китае (Jinsong K., Xiangyun Z., Ying W.), Японии (Morimoto S., Kawamoto K., Sanad M., Ichikawa S., Chen Z.), Индии (Benjak O., Mishara A., Mahajan V., Agarwal P.). Так же ведутся исследования в США и европейских странах (Schroder D., Schaffner C., Li Y.). Среди отечественных исследователей данной темой занимаются: Билецкий Ю.О., Яровой Г.И., Щур И. З., Анищенко Н.В.
3. Математическое описание СДПМ
Ниже представлено математическое описание СДПМ в естественной трехфазной системе координат: Последняя может быть трансформирована в другие, например, с помощью преобразования Парка – во вращающуюся систему координат ориентированную по потокосцеплению ротора d, q или в двухфазную ортогональную неподвижную α‐β (с помощью преобразования Кларка)
")
Уравнения баланса напряжения статора 3х фазного симметричного СДПМ в матричной форме:
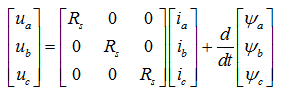
где:
ua, ub, uc – мгновенные значения фазных напряжений статора,
Rs – активное сопротивление статорной обмотки,
ia, ib, ic – мгновенные значения фазных токов статора,
ψa, ψb, ψc – потокосцепление обмоток статора.
Фазные потокосцепления представлены в виде:
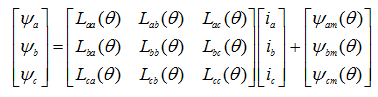
где:
ψm(θ) – потокосцепления постоянных магнитов,
Lxx(θ) – собственная индуктивность обмотки x,
Lxy(θ) – взаимная индуктивность обмотки x.
Индуктивности обмоток статора определены как функции угла поворота ротора:
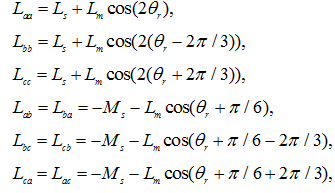
где:
Ls(θ) – среднее значение самоиндуктивности каждой обмотки статора.
Lm(θ) – амплитуда флуктуаций самоиндуктивности и взаимной индуктивности обмоток статора из‐за изменения угла поворота ротора.
Ms(θ) – среднее значение взаимной индуктивности между статорными обмотками.
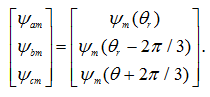
Потокосцепление постоянных магнитов определяется как:
Для вычисление электромагнитного момента используется уравнение, которое составлено согласно закону Ленца:

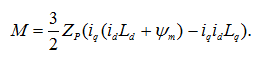
где Zp число пар полюсов.
Используя преобразование Парка можно перейти к вращающейся системе координат d, q, которая ориентирована по потокосцеплению ротора.
Уравнения баланса напряжения статора:
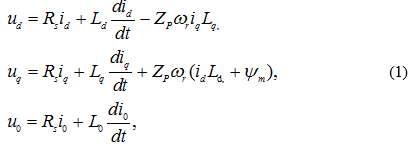
где:
ud, uq, u0 – проекции вектора напряжения на оси d, q соответственно, напряжение нулевой последовательности.
id, iq, i0 – проекции вектора тока на оси d, q соответственно, ток нулевой последовательности.
Ld = Ls + Ms + 3/2 * Lm – индуктивность статора по d ‐ оси.
Lq = Ls + Ms - 3/2 * Lm – индуктивность статора по q ‐ оси.
L0 = Ls - 2Ms – индуктивность статора нулевой последовательности.
ωr – угловая механическая скорость вращения ротора.
Уравнение момента в системе координат d, q имеет вид:
С помощью преобразования Кларка можно перейти к неподвижной ортогональной системе координат.
Наиболее простыми, в плане требований к вычислительному устройству и простоте наладки, являются неадаптивные методы идентификации. Но они показывают худшие результаты по сравнению с адаптивными методами, которые в свою очередь сложней настраивать и они требуют больше вычислительного времени. Далее приведены неадаптивный метод на основе токов и напряжений статора и метод на основе АСЭМ.
4. Методы идентификации
4.1 Оценщик на основе измеренных напряжений и токов статора
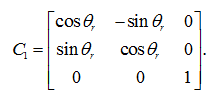
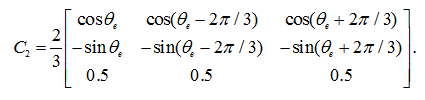
В данном подходе используется модель двигателя во вращающейся системе координат. В общем, зависимость между составляющими во вращающейся и стационарной системе координат может быть выражена как [5‐7]:

где верхние индексы r
и s
используются для обозначения вращающейся и стационарной системы координат, соответственно. [C1] – матрица коэффициентов преобразования Кларка:
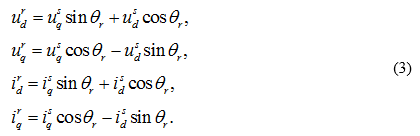
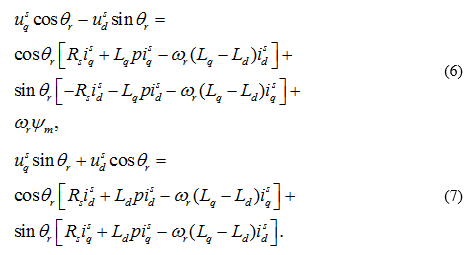
Подставляя u и i вместо х в уравнение (2) и выполнив преобразования получим:
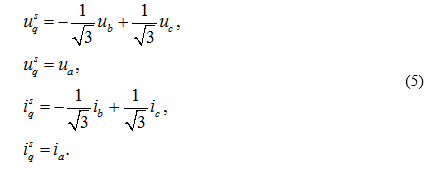
Зависимость между трехфазными и ортогональными переменными в неподвижной системе координат определяются как:

где:
Подставляя u и i вместо х в уравнение (4) и выполнив преобразования получим:
Из уравнений (2) и (3) можно получить следующие уравнение:
Преобразуя ортогональные переменные в трёхфазные используя уравнения (5) и (7) можно получить выражение для нахождения угла порота ротора:

где:

Таким образом положение ротора может быть получено с помощью напряжений и токов статора и скорости ωr, которая в свою очередь, так же может быть вычислена с помощью напряжений и токов статора. Для этого используются уравнения (6) и (7), в которых вместо d, q составляющих подставляем трехфазные, согласно уравнений (5) и предполагая, что Lq = Ld = Ls. Получим следующее выражение для вычисления скорости ωr:

где:

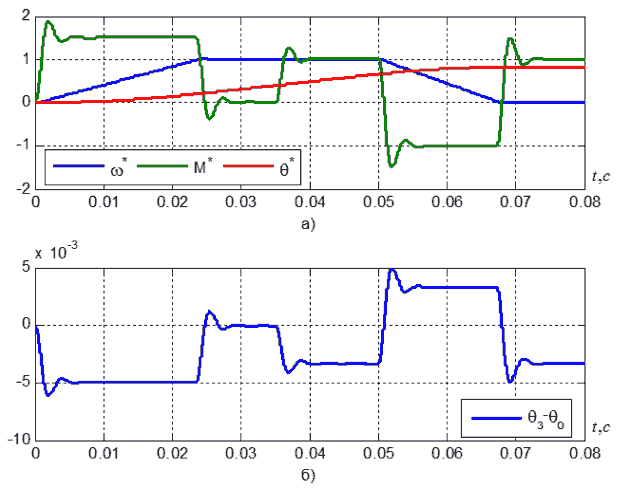
На рис. 4.1 представлены графики переходных процессов двигателя и ошибка оценивания скорости вала СДПМ.
, ошибка оценивания скорости вала СДПМ (б)")
Из графиков рис. 4.1 видно, что ошибка оценивания скорости не превышает 10 рад/с. Из недостатков можно отметить плохую работоспособность метода на скоростях, близких к нулевым, что связано с низкими значениями токов.
4.2 Оценщик на основе адаптивной системы с эталонной моделью (АСЭМ)
Далее будет описана АСЭМ которая использует две модели для вычисления потокосцепления СДПМ. Одна модель является эталонной, другая подстраиваемой. Структурная схема АСЭМ приведена ниже.

Уравнения эталонной модели на основе математического описания СДПМ в неподвижной системе координат представлены ниже [8-10]:
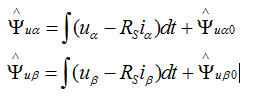
Данные два уравнения соответствуют модели напряжения статора, которая не содержит угол поворота ротора и представляет собой эталонную модель.
Уравнения (9) и (10) представляют собой токовою модель, которая содержит угол поворота ротора и соответственно представляет собой подстраиваемую модель.
Выход этих двух моделей сравнивается в механизме адаптации для оценки подстраиваемого параметра, который настраивает адаптивную модель таким образом, чтобы ошибка между выходами этих моделей стремилась к нулю.
Механизм адаптации использует ошибку угла Δθ как корректирующую информацию для вычисления регулируемого параметра θ в адаптивной модели.
Адаптация выполняется с помощью ПИ корректора:
Моделирование выполнялось в следующих режимах: разгон до номинальной скорости на холостом ходу, наброс номинальной нагрузки, торможение до нулевой скорости. Для моделирование использованы следующие параметры двигателя:

Коэффициенты ПИ корректора были подобраны экспериментальным путем.Переходные процессы и ошибка оценивания приведены на рис. 4.3
Выводы
- Получение системы бездатчикового электропривода и устранение электромеханического датчика удешевляет аппаратную часть, уменьшает сложность установки системы (отсутствие дополнительных кабелей), снижает инерционность системы и чувствительность привода к шумам, увеличивает робастность и надежность.
- Проведенный анализ исследований и разработок по данной теме показал наличие большого количества методов идентификации угла поворота ротора СДПМ. Из анализа следует, что отечественные публикации не предоставляют развернутого и структурированного описания методов, а также рекомендаций к их применению. Это приводит к необходимости дополнительных исследований в этой области, чему и посвящена данная магистерская работа.
- Моделирование показало, что неадаптивный метод идентификации угла основанный на напряжениях и токах является работоспособным только на высоких скоростях и под нагрузкой. Это связано с большими токами, протекающими в обмотках статора, которые необходимы для вычисления угла и скорости. Ошибка оценивания скорости не превышает 10 рад/с. На низких скоростях данный метод показывает себя неработоспособным. Так же, можно отметить высокую чувствительность к изменению параметров двигателя. Из достоинств данного метода можно отметить простоту реализации и отсутствие необходимости настройки.
- Моделирование АСЭМ показало, что разработанная система имеет характеристики аналогичные характеристикам системы с электромеханическим датчиком положения ротора. Ошибка оценивания не превышает 0.005 рад и увеличивается при увеличении момента на валу. Таким образом, АСЭМ позволяет решить задачу оценки угла поворота ротора в разных режимах роботы двигателя. Результаты моделирования показали, что разработанная система позволяет получить диапазон регулирования скорости до 1:50. Недостатком метода является отсутствие методики выбора коэффициентов корректора.
Так как на момент написания данного реферата написание магистерской работы еще не завершено, на данном этапе рассмотрены неадаптивные и часть адаптивных методов идентификации угла поворота ротора СДПМ. В дальнейшем планируется провести исследование и математическое моделирование наиболее перспективных методов идентификации, таких как: наблюдатели состояния, инжекция сигналов и искусственный интеллект. Окончательное завершение магистерской работы: январь 2015 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список использованных источников
- Fracchia M., Sciutto G. Cycloconverter Drives for Ship Propulsion. Symp on Power Electronics, Electr Drives, Advanced Electr. Motors SPEEDAM’94, Taormina, Italy. – 1994. – pp. 255G260.
- Gieras J. F. Permanent Magnet Motor Technology / J. F. Gieras, M.Wing. – 2002. – New York. – p. 611.
- Jabbar M.A., Tan T.S., Binns K.J. Recent developments in disk drive spindle motors. Int Conf on Electr Machines ICEM’92, Vol. 2, Manchester, UK, 1992, pp. 381-385.
- Benjak O. Review of Position Estimation Methods for IPMSM Drives without a Position Sensor Part I: Nonadaptive Methods / O. Benjak, D. Gerling // XIX International Conference on Electrical Machines – 2010. – pр. 1-6.
- Hoque M.A. Speed and Position Sensorless Permanent Magnet Synchronous Motor Drives / M.A. Hoque, M.A. Rahaman // IEEE Anadien Conference on Electrical and Computer engineering, CCECE – 1994. – pp. 689-692.
- Jabbar M.A. Sensorless Permanent Magnet Synchronous Motor Drives / M.A. Jabbar, M.A. Hoque, M.A. Rahman // Canadian Conference on Electrical and Computer Engineering, CCECE – 1997. – pp. 878-883.
- Johnson J. P. Review of Sensorless methods for Brushless DC / J. P. Johnson, M. Ehsani and Y. Guzelgunler // IEEE Industry Applications Conference, IAS, Vol. 1 – 1999. – pp. 143 – 150.
- Vesely L. Sensorless Control for Synchronous Motors // L. Vesely, P. Zbranek // International Conference on Autonomous and Intelligent Systems (AIS) – 2010. – p. 1-5.
- Mishara A. MRAS Based Estimation of Speed in Sensorless PMSM Drive / A. Mishara, V. Mahajan, P. Agarwal // IEEE Fifth Power India Conference. – 2012 – p. 1- 5.
- Ichikawa S. Sensorless Control of an Interior Permanent Magnet Synchronous Motor on the Rotating Coordinate Using an Extended Electromotive Force / S. Ichikawa, C. Zhiqian, M. Tomita, S. Doki // Industrial Electronics Society, 2001. IECON '01. The 27th Annual Conference of the IEEE (Volume:3). – Denver. – 2001. – pp. 1667 – 1672.