
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Цели и задачи
- 2. Двигатель постоянного тока
- 2.1 Как устроены электродвигатели постоянного тока
- 2.2 Способы возбуждения электродвигателей постоянного тока
- 2.3 Регулирование частоты вращения электродвигателя постоянного тока
- 2.4 Торможение электродвигателей постоянного тока
- 3 Тиристорный преобразователь
- 3.1 Краткая информиция
- 3.2 Схемы выпрямления, принципы построения силовых цепей преобразователей
- 4. Привод постоянного тока DCS 800 используемый в лабораторном стенде
- 4.1 Преимущества DCS 800
- 4.2 Базовые программные обеспечения
- 4.3 Система электропривода Ведущий-Ведомый
- 4.4 Плата связи SDCS-COM-8
- 4.5 Функции базового программирования
- 5. Плата 5710
- Выводы
- Список источников
Введение
В настоящее время в практике регулируемого электропривода широкое распространение получили преобразователи в комплекте с системой управления, реализованной на цифровом сигнальном процессоре. Но не всегда ВУЗ может предложить достойное оборудование для подготовки студентов к практической части. Ни для кого не секрет, что лабораторная база электротехнических специальностей вузов Украины морально устарела, и на сегодня не соответствует высоким стандартам, а соответственно и высокому уровню лабораторной практике студентов. Предлагаемые на рынке лабораторного оборудования исследовательские
стенды, не пригодны для учебного процесса, и применение им скорее даже не в вузах, а в колледжах и техникумах. В этом случае пользователю предоставляются достаточно ограниченные возможности по выбору одной из типовых систем управления, предусмотренных разработчиками, и их параметрированию. При необходимости усложнения системы управления с целью улучшения качества регулирования или расширения её функциональных возможностей возникают проблемы, связанные с реализацией дополнительных устройств и сопряжением их с основным процессором. Интересные решения предлагает ряд зарубежных фирм, связанных с разработкой основанных на ПК/ПЛИС масштабируемых программно-аппаратных симуляторов, например, устройств силовой электроники и даже комплексных электромеханических систем, работающих в реальном времени, управляющих систем быстрого прототипирования и т.п. Однако стоимость подобного оборудования чрезмерно высока для университетов [2].
Преодоление проблемы отсутствия должной лабораторной базы состоит в создании молодыми учёными своими руками индивидуальных
экспериментальных установок, ориентированных на решение поставленных перед ними задач. Нередко эти задачи, наталкивается на отсутствие опыта создания подобных установок у исследователей, и включает проработку проекта макета, поиск и покупку подходящей элементной базы и программного обеспечения, монтаж и наладку оборудования, написание программного кода и т.п., что неизбежно в данной ситуации [5].
1. Цели и задачи
Основной целью работы является разработка и создание лабораторного стенда для возможности практической реализации, управления и наблюдения различных электромеханических систем со сложными параметрически и функционально неопределёнными объектами. Исследуемый комплектный электропривод предназначен для управления двигателем постоянного тока [4].
2. Двигатель постоянного тока.
Электродвигатели постоянного тока применяют в тех электроприводах, где требуется большой диапазон регулирования скорости, большая точность поддержания скорости вращения привода, регулирования скорости вверх от номинальной.
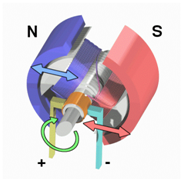
Рисунок 1 – Работа двигателя постоянного тока.
2.1 Как устроены электродвигатели постоянного тока
Работа электрического двигателя постоянного тока основана на явлении электромагнитной индукции. Из основ электротехники известно, что на проводник с током, помещенный в магнитное поле, действует сила, определяемая по правилу левой руки:
F = BIL, где I — ток, протекающий по проводнику, В — индукция магнитного поля; L — длина проводника.
При пересечении проводником магнитных силовых линий машины в нем наводится электродвижущая сила, которая по отношению к току в проводнике направлена против него, поэтому она называется обратной или противодействующей (противо ЭДС). Электрическая мощность в двигателе преобразуется в механическую и частично тратится на нагревание проводника.
Конструктивно все электрические двигатели постоянного тока состоят из индуктора и якоря, разделенных воздушным зазором. Индуктор электродвигателя постоянного тока служит для создания неподвижного магнитного поля машины и состоит из станины, главных и добавочных полюсов. Станина служит для крепления основных и добавочных полюсов и является элементом магнитной цепи машины. На главных полюсах расположены обмотки возбуждения, предназначенные для создания магнитного поля машины, на добавочных полюсах - специальная обмотка, служащая для улучшения условий коммутации. Якорь электродвигателя постоянного тока состоит из магнитной системы, собранной из отдельных листов, рабочей обмотки, уложенной в пазы, и коллектора служащего для подвода к рабочей обмотке постоянноготока. Коллектор представляет собой цилиндр, насаженный на вал двигателя и избранный из изолированных друг от друга медных пластин. На коллекторе имеются выступы-петушки, к которым припаяны концы секций обмотки якоря. Съем тока с коллектора осуществляется с помощью щеток, обеспечивающих скользящий контакт с коллектором. Щетки закреплены в щеткодержателях, которые удерживают их в определенном положении и обеспечивают необходимое нажатие щетки на поверхность коллектора. Щетки и щеткодержатели закреплены на траверсе, связанной с корпусом электродвигателя.
2.2 Способы возбуждения электродвигателей постоянного тока
Под возбуждением электрических машин понимают создание в них магнитного поля, необходимого для работы электродвигателя. Схемы возбуждения электродвигателей постоянного тока показаны на рисунке.
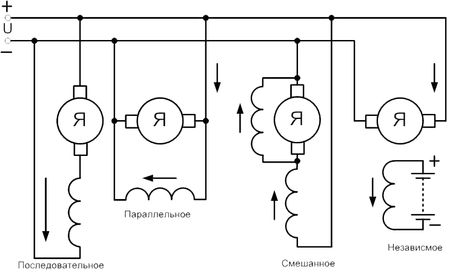
Рисунок 2 – Схемы возбуждения электродвигателей постоянного тока: а - независимое, б - параллельное, в - последовательное, г - смешанное.
По способу возбуждения электрические двигатели постоянного тока делят на четыре группы:
1. С независимым возбуждением, у которых обмотка возбуждения НОВ питается от постороннего источника постоянного тока.
2. С параллельным возбуждением (шунтовые), у которых обмотка возбуждения ШОВ включается параллельно источнику питания обмотки якоря.
3. С последовательным возбуждением (сериесные), у которых обмотка возбуждения СОВ включена последовательно с якорной обмоткой.
4. Двигатели со смешаным возбуждением (компаундные), у которых имеется последовательная СОВ и параллельная ШОВ обмотки возбуждения.
2.3 Регулирование частоты вращения электродвигателя постоянного тока
Частота вращения двигателя постоянного тока:
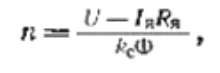
где U — напряжение питающей сети; Iя — ток якоря; Rя — сопротивление цепн якоря; kc — коэффициент, характеризующий магнитную систему; Ф — магнитный поток электродвигателя.
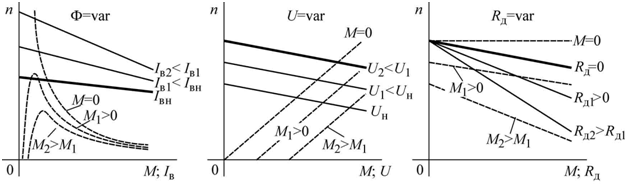
Рисунок 3 – Регулирование скорости ДПТ.
Из формулы видно, что частоту вращения электродвигателя постоянного тока можно регулировать тремя путями: изменением потока возбуждения электродвигателя, изменением подводимого к электродвигателю напряжения и изменением сопротивления в цепи якоря.
Наиболее широкое применение получили первые два способа регулирования, третий способ применяют редко: он неэкономичен, скорость двигателя при этом значительно зависит от колебаний нагрузки. Механические характеристики, которые при этом получаются, показаны на рисунке [3].
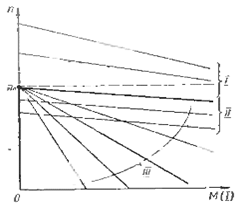
Рисунок 4 – Механические характеристики электродвигателя постоянного тока при различных способах регулирования частоты вращения.
2.4 Торможение электродвигателей постоянного тока
В электроприводах с электродвигателями постоянного тока применяют три способа торможения: динамическое, рекуперативное и торможение противовключением [6].
- Динамическое торможение электродвигателя постоянного тока осуществляется путем замыкания обмотки якоря двигателя накоротко или через резистор. При этом электродвигатель постоянного тока начинает работать как генератор, преобразуя запасенную им механическую энергию в электрическую. Эта энергия выделяется в виде тепла в сопротивлении, на которое замкнута обмотка якоря. Динамическое торможение обеспечивает точную остановку электродвигателя.
- Рекуперативное торможение электродвигателя постоянного тока осуществляется в том случае, когда включенный в сеть электродвигатель вращается исполнительным механизмом со скоростью, превышающей скорость идеального холостого хода. Тогда ЭДС наведенная в обмотке двигателя, превысит значение напряжения сети, ток в обмотке двигателя изменяет направление на противоположное. Электродвигатель переходит на работу в генераторном режиме, отдавая энергию в сеть. Одновременно на его валу возникает тормозной момент. Такой режим может быть получен в приводах подъемных механизмов при опускании груза, а также при регулировании скорости двигателя и во время тормозных процессов в электроприводах постоянного тока.
- Рекуперативное торможение двигателя постоянного тока является наиболее экономичным способом, так как в этом случае происходит возврат в сеть электроэнергии. В электроприводе металлорежущих станков этот способ применяют при регулировании скорости в системах Г - ДПТ и ЭМУ - ДПТ.
- Торможение противовключением электродвигателя постоянного тока осуществляется путем изменения полярности напряжения и тока в обмотке якоря. При взаимодействии тока якоря с магнитным полем обмотки возбуждения создается тормозной момент, который уменьшается по мере уменьшения частоты вращения электродвигателя. При уменьшении частоты вращения электродвигателя до нуля электродвигатель должен быть отключен от сети, иначе он начнет разворачиваться в обратную сторону.
3. Тиристорный преобразователь
3.1 Крактая информиция
Тиристорным преобразователем постоянного тока (ТП) является устройство для преобразования переменного тока в постоянный с регулированием по заданному закону выходных параметров (тока и напряжения). Тиристорные преобразователи предназначаются для питания якорных цепей двигателей и их обмоток возбуждения.
Тиристорные преобразователи состоят из следующих основных узлов:
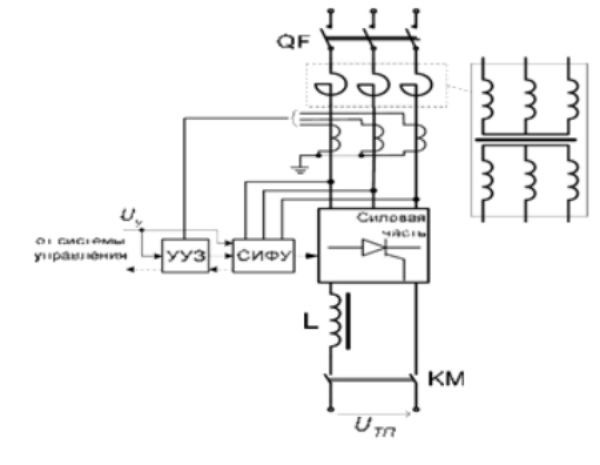
Трансформатор осуществляет согласование входного и выходного напряжений преобразователя и (так же, как и токоограничивающий реактор) ограничение тока короткого, замыкания во входных цепях. Сглаживающие реакторы предназначаются для сглаживания пульсаций выпрямленных напряжения и тока. Реакторы не предусматриваются, если индуктивность нагрузки достаточна для ограничения пульсаций в заданных пределах.
Применение тиристорных преобразователей постоянного тока позволяет реализовать практически те же характеристики электропривода, что и при использовании вращающихся преобразователей в системах генератор-двигатель (Г — Д), т. е. регулировать в широких пределах частоту вращения и момент двигателя, получать специальные механические характеристики и нужный характер протекания переходных процессов при пуске, торможении, реверсе и т. д.
3.2 Схемы выпрямления, принципы построения силовых цепей преобразователей
Тиристорные преобразователи выполняются с однофазными и многофазными схемами выпрямления. Существует несколько расчетных соотношений основных схем выпрямления. Одна из таких схем показана на рис. 5, а. Регулирование выпрямленного напряжения Ua и тока Ia производится путем изменения угла управления. На рис. 5, б-д для примера показан характер изменения токов и напряжений в трехфазной нулевой схеме выпрямления при активно-индуктивной нагрузке [11].
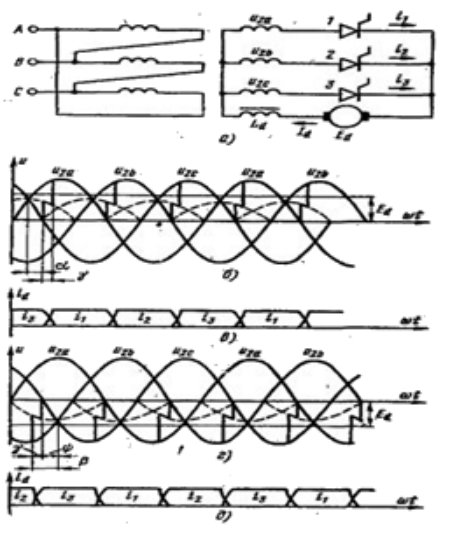
Рисунок 5 – Трехфазная нулевая схема (а) и диаграммы изменения тока и напряжения в выпрямительном (б, в) и инверторном (г, д) режимах.
Показанный на диаграммах угол (угол коммутации), характеризует период времени, в течение которого ток протекает одновременно по двум тиристорам. Зависимость среднего значения выпрямленного напряжения Ua от угла регулирования называется регулировочной характеристикой.
Для нулевых схем среднее выпрямленное напряжение определяется из выражения [15].
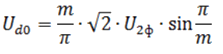
Где m — число фаз вторичной обмотки трансформатора; U2ф – действующее значение фазового напряжения вторичной обмотки трансформатора.
Для мостовых схем Udo в 2 раза выше, так как эти схемы эквивалентны последовательному включению двух нулевых схем.
В трехфазной нулевой схеме условия использования трансформатора при обычно применяемых группах соединения Y/Y и треугольник/звезда хуже из-за наличия постоянной составляющей потока. Это приводит к увеличению сечения магнитопровода и, следовательно, расчетной мощности трансформатора. Для исключения постоянной составляющей потока применяют соединение вторичных обмоток трансформатора в зигзаг
, что также несколько увеличивает расчетную мощность. Увеличенный уровень, пульсаций выпрямленного напряжения вместе с отмеченным выше недостатком ограничивает использование трехфазной нулевой схемы [17].
4. Привод постоянного тока DCS 800 используемый в лабораторном стенде
4.1 Преимущества DCS 800
Привод удовлетворяет самым жестким требованиям таких электродвигательных установок как например:
- Испытательные стенды, шахтные подъемники, прокатные станы, а также таких установок без электродвигателей как;
- Электролиз - Магнитная техника – Зарядные агрегаты.
Встроенное программное обеспечение позволяет моделировать все классические схемы: 12 – пульсную схему, системы совместного движения, двухдвигательные схемы, управление реверсированием поля.

Рисунок 6 – Внешний вид комплектного преобразователя ABB DCS 800.
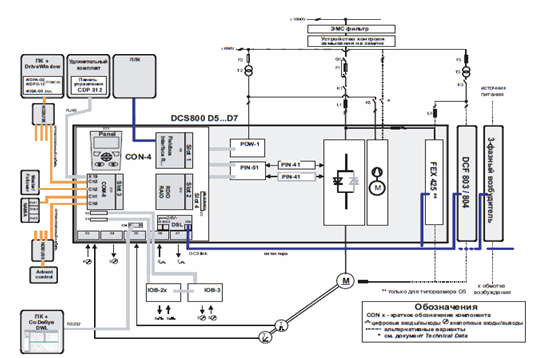
Рисунок 7 – Обзор компонентов преобразователя.
4.2 Базовые программные обеспечения
Программное обеспечение DCS 800 содержит базовые функции регулирования скорости, тока якоря, тока якоря и напряжения на двигателе. Гибкая система адресации команд позволяет осуществлять управление по последовательным интерфейсам fieldbus или системой ведущий-ведомый, или по средствам сигналов от внешних устройств управления, а также по смешанной системе [7].
Логическая структура привода позволяет конфигурировать привода так, чтобы его действия определялись стандартом Profibus или соответствовали классическим методам управления [10].
Доступ ко всем параметрам может осуществляться либо посредствам последовательной связи, либо по стандарту IEC 61131, либо по средствам адаптивного программирования.
4.3 Система электропривода Ведущий-Ведомый
Привод соединен по схеме Ведущий-Ведомый. Если двигатели, присоединенные к общему валу или механизму, вращаются с одинаковой скоростью и с одинаковым крутящим моментом.
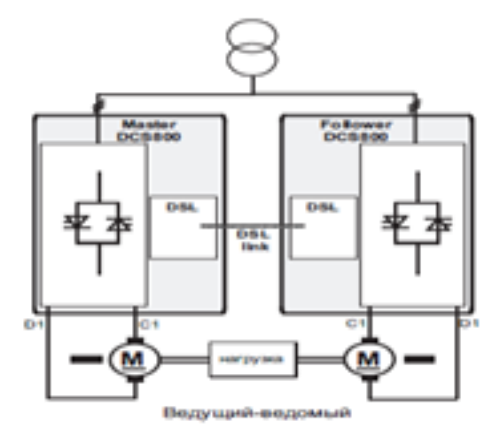
Рисунок 8 – Соединение приводом по схеме Ведущий-Ведомый
4.4 Плата связи SDCS-COM-8
DCS 800 содержит следующие интерфейсы для быстрой последовательной связи по оптоволокну:
- DDCS протокол для связи с контроллером AC800M
- Расширение каналов DDCS через плату AIMA-01
- Связь протоколов в схеме Ведущий-Ведомый
- Связь с ПК (программ DriveWindow), системой дистанционной диагностики NETA, а также CDP 312 от ACS800
4.5 Функции базового программирования
Рисунок 9 – Распределение клемм с помощью макроса.
(анимация: 5 кадров, 6 циклов повторения, 433 килобайт)
5. Плата 5710
5710 представляет собой плату АЦП с высоким разрешением, на которой также содержатся устройства ввода/вывода дискретных сигналов [12].
Аналоговая часть платы позволяет производить измерения с частотой 70000 измерений в секунду. Инициализация преобразователя осуществляется либо под управлением платы вычислителя (процессорной платы) либо при помощи расположенного на плате 5710 счетчика/таймера. В последнем случае измерения производятся в фоновом режиме. Счетчик/таймер также может быть использован для выполнения временных измерений общего назначения либо для генерации ШИМ-сигнала.
К плате 5710 могут быть подключены 16 униполярных или 8 дифференциальных аналоговых сигналов. Разрешающая способность АЦП составляет 12 разрядов про входном сигнале (-5..+5) В. Переключение каналов осуществляется программным способом. Допускается подавать на входы сигналы напряжением до (-15...+ 15) В при отсутствии на плате напряжения питания. Расположенный на плате усилитель позволяет изменять коэффициент усиления х1, х10, х100 путем установки перемычек. Входной сигнал при этом будет составлять (+-5)В, (+-500) мВ и (+-50) мВ сответственно.
Плата 5710 позволяет выполнять до 33000 измерений в секунду, а плата 5710-1- 70000 измерений в секунду.
На плате также имеются 2 аналоговых выходных канала. Выходной сигнал также задается перемычками и может быть (0..5) В, (+-10) В или (+-5) В.
Плата 5710 позволяет работать с 19 дискретными линиями ввода/вывода. Линии скомпонованы в 3 группы. Одна группа из трех линий может работать только на выход, следующая группа из 8 линий может быть сконфигурирована двумя подгруппами по 4 линии на вход или на выход, а третья группа из 8 линий также может быть сконфигурирована на вход или на выход, но всей группой целиком.
На плате также доступны программисту три 16-ти разрядных счетчика/таймера. Первый счетчик/таймер является делителем для входного сигнала частотой 4 Мгц. Коэффициент деления может задаваться программно. Второй счетчик/таймер используется в качестве делителя частоты, поступающей с первого счетчика/таймера и формирует периодический сигнал для запуска аналого-цифрового преобразователя. При этом период опроса может быть от 40000 измерений в секунду до 3 измерений в час. Последний счетчик может быть использован как счетчик/таймер общего назначения, при этом его входные и выходные линии выводятся на разъем дискретного порта, а вход может быть подключен к внутреннему генератору 4 МГц при помощи перемычек.
Выводы
Создана универсальная экспериментальная установка с возможностью практической реализации, управления и наблюдения различных электромеханических систем. Средством моделирования в установке реализован механизм
имитации различных технологических процессов. Реализованы алгоритмы управления двигателем постоянного тока (ДПТ), проведены экспериментальные исследования работы электропривода. Особенностью установки является возможность реализации алгоритмов управления практически любой сложности и исключительно на программном уровне, что немаловажно и в учебном процессе. Это открывает широкие возможности при модернизации действующих электроприводов путём перепрограммирования. Установка уже используется как полигон для апробации новых алгоритмов управления при подготовке аспирантов и магистров, а также при проведении практических и лабораторных работ по дисциплинам Комплектные электроприводы
[14].
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: декабрь 2014 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты. Эта часть реферата исключительно обзорная. Дальнейшая работа будет направлена на экспериментальное исследование и доработку имеющихся результатов в сфере цифровых систем управления [13].
Список источников
- Чермалых В. М. Идентификация параметров физической и виртуальной моделей частотно-регулируемого асинхронного электропривода / Национальный технический университет Украины
КПИ
, г. Киев / Проблеми енергоресурсозбереження в електротехнічних системах. Наука, освіта і практика № 1/2011 (1) с. 54-55 - Полилов Е.В. Исследовательский стенд дляя апробации алгоритмов управления сложными электрическими системпми. / Украина Алчевск с. 481-487
- Передерий А.В. Імітація навантаження електроприводу поздовжньо-стругального верстату / Наукові праці Донецького національного технічного університету с. 133-137
- Толочко О.И. К вопросу об изменении типовых структур цифровых систем управления комплектными электроприводами / Наукові праці Донецького національного технічного університету с. 188-193
- Прітченко О.В. Концепция построения малогабаритных лабораторных стендов / Кременчуцький державний університет імені Михайла Остроградського / Електромеханічні і енергозберігаючі системи. Випуск 2/2010 (10).
- Гладырь А.И. Лабораторный комплекс для иследования процесса трогания производственных механизмов / Кременчугский государственный политехнический университет имени Михаила Остроградского.
- Голдсуорт Б. Проектирование цифровых логических устройств / Б. Голдсуорт. – М.: Машиностроение, 1985. – 288 с.
- Шинкаренко В. Ф. Лабораторный комплекс для исследования статических и динамических харакетристик асинхронных машин / Електромеханічні і енергозберігаючі системи. Випуск 2/2012 (18) с. 113-115
- Орловський І. А. Модернизация лабораторного стенда подвесного конвейера Part_2-8 / Електромеханічні і енергозберігаючі системи. Випуск 2/2013 (22). Частина 2 с. 427-431
- Орловський І. А. Модернизация оборудованием фирмы VIPA лабораторного стенда с манипулятором М10П / Електромеханічні і енергозберігаючі системи. Випуск 3/2012 (19) с. 597-599
- Полилов Е.В. Практическая реализация и исследование релейно-робастных алгоритмов управления синхронными электродвигателями Сборник ХПИ 2010-3 / Теоретические вопросы 98 автоматизированного электропривода с. 90-98
- Заквасов В.В. Программно-аппаратный комплекс для исследования встроенных систем управления / Електромеханічні і енергозберігаючі системи. Випуск 1/2010 (9)
- Кореньков Э. В. Регулирование технологических параметров гидротанспортных систем с использованием исследовательского комплекса-тренажёра / Електромеханічні і енергозберігаючі системи. Випуск 2/2013 (22) с. 117-125
- Бондаренко В.І. Современные подходы и методы изложения прикладных дисциплин при подготовке специалистов по электромеханике Сборник ХПИ 2010-21 / Учебный процесс. Дискуссии с. 558-559
- Петров Д. СТА Применение в учебном процессе современных средств разработки СРВ
- Ефимов И.Г. Стенд для исследований частотно-регулируемых электроприводов / 5 международная конференция по автоматизированому электроприводу АЭП-2007 Санкт-Петербург, 18-21 сентябрь 2007 с. 216-218
- Сердюк А. А. Экспериментальный комплекс гидротранспортной установки для исследования кавитационных систем / Проблеми енергоресурсозбереження в електротехнічних системах. Наука, освіта і практика № 1/2011 (1)