
Реферат за темою випускної роботи
Зміст
- Всуп
- 1. Цілі і завдання
- 2. Двигун постійного струму
- 2.1 Як влаштовані електродвигуни постійного струму
- 2.2 Способи збудження електродвигунів постійного струму
- 2.3 Регулювання частоти обертання електродвигуна постійного струму
- 2.4 Гальмування електродвигунів постійного струму
- 3 Тиристорний перетворювач
- 3.1 Коротка інформіціі
- 3.2 Схеми випрямлення, принципи побудови силових ланцюгів перетворювачів
- 4. Привід постійного струму DCS 800 використовується в лабораторному стенді
- 4.1 Переваги DCS 800
- 4.2 Базові програмні забезпечення
- 4.3 Система електроприводу Ведучий-Ведений
- 4.4 Плата зв'язку SDCS-COM-8
- 4.5 Функції базового програмування
- 5. Плата 5710
- Висновки
- Список джерел
Вступ
В даний час в практиці регульованого електроприводу широкого поширення набули перетворювачі в комплекті з системою управління, реалізованої на цифровому сигнальному процесорі. Але не завжди ВНЗ може запропонувати гідне обладнання для підготовки студентів до практичної частини. Ні для кого не секрет, що лабораторна база електротехнічних спеціальностей вузів України морально застаріла, і на сьогодні не відповідає високим стандартам, а відповідно і високому рівню лабораторній практиці студентів. Пропоновані на ринку лабораторного обладнання дослідні
стенди, не придатні для навчального процесу, і застосування їм скоріше навіть не в вузах, а в коледжах і технікумах. У цьому випадку користувачеві надаються досить обмежені можливості щодо вибору однієї з типових систем управління, передбачених розробниками, і їх параметрування. При необхідності ускладнення системи управління з метою поліпшення якості регулювання або розширення її функціональних можливостей виникають проблеми, пов'язані з реалізацією додаткових пристроїв і сполученням їх з основним процесором. Цікаві рішення пропонує ряд зарубіжних фірм, пов'язаних з розробкою заснованих на ПК/ПЛІС масштабованих програмно-апаратних симуляторів, наприклад, пристроїв силової електроніки і навіть комплексних електромеханічних систем, що працюють в реальному часі, керуючих систем швидкого прототипування і т.п. Однак вартість подібного обладнання надмірно висока для університетів [2].
Подолання проблеми відсутності належної лабораторної бази полягає у створенні молодими вченими своїми руками індивідуальних
експериментальних установок, орієнтованих на вирішення поставлених перед ними завдань. Нерідко ці завдання, наштовхується на відсутність досвіду створення подібних установок у дослідників, і включає опрацювання проекту макета, пошук і купівлю підходящої елементної бази та програмного забезпечення, монтаж і налагодження обладнання, написання програмного коду і т.п., що неминуче в даній ситуації [5].
1. Цілі і завдання
Основною метою роботи є розробка і створення лабораторного стенду для можливості практичної реалізації, управління та спостереження різних електромеханічних систем зі складними параметрически і функціонально невизначеними об'єктами. Досліджуваний комплектний електропривод призначений для управління двигуном постійного струму [4].
2. Двигун постійного струму
Електродвигуни постійного струму застосовують у тих електроприводах, де потрібен великий діапазон регулювання швидкості, велика точність підтримки швидкості обертання приводу, регулювання швидкості вгору від номінальної.
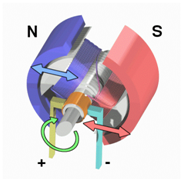
Рисунок 1 – Робота двигуна постійного струму.
2.1 Як влаштовані електродвигуни постійного струму
Робота електричного двигуна постійного струму заснована на явищі електромагнітної індукції. З основ електротехніки відомо, що на провідник із струмом, поміщений в магнітне поле, діє сила, що визначається за правилом лівої руки:
F = BIL, де I - струм, що протікає по провіднику, В - індукція магнітного поля; L - довжина провідника.
При перетині провідником магнітних силових ліній машини в ньому наводиться електрорушійна сила, яка по відношенню до струму в провіднику спрямована проти нього, тому вона називається зворотної чи протидіє (противо ЕРС). Електрична потужність в двигуні перетворюється на механічну і частково витрачається на нагрівання провідника.
Конструктивно всі електричні двигуни постійного струму складаються з індуктора і якоря, розділених повітряним зазором. Індуктор електродвигуна постійного струму служить для створення нерухомого магнітного поля машини і складається з станини, головних і додаткових полюсів. Станина служить для кріплення основних і додаткових полюсів і є елементом магнітного ланцюга машини. На головних полюсах розташовані обмотки збудження, призначені для створення магнітного поля машини, на додаткових полюсах - спеціальна обмотка, що служить для поліпшення умов комутації. Якір електродвигуна постійного струму складається з магнітної системи, зібраної з окремих листів, робочої обмотки, покладеної в пази, і колектора службовця для підведення до робочій обмотці постоянноготока. Колектор являє собою циліндр, насаджений на вал двигуна і обраний з ізольованих один від одного мідних пластин. На колекторі є виступи - півники, до яких припаяні кінці секцій обмотки якоря. Знімання струму з колектора здійснюється за допомогою щіток, що забезпечують ковзний контакт з колектором. Щітки закріплені в щіткотримачах , які утримують їх у певному положенні і забезпечують необхідне натискання щітки на поверхню колектора. Щітки й щіткотримачі закріплені на траверсі, пов'язаної з корпусом електродвигуна.
2.2 Способи збудження електродвигунів постійного струму
Під збудженням електричних машин розуміють створення в них магнітного поля, необхідного для роботи електродвигуна. Схеми збудження електродвигунів постійного струму показані на pисункy.
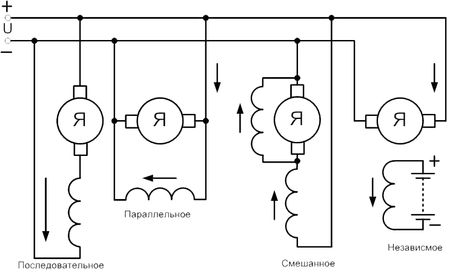
Рисунок 2 – Схеми збудження електродвигунів постійного струму: а - незалежне, б - паралельне, в - послідовне, г - змішане.
За способом збудження електричні двигуни постійного струму ділять на чотири групи:
1. З незалежним збудженням, у яких обмотка збудження НОВ живиться від стороннього джерела постійного струму.
2. З паралельним збудженням (шунтові), у яких обмотка збудження ШОВ включається паралельно джерела живлення обмотки якоря.
3. З послідовним збудженням (серієсний), у яких обмотка збудження СОВ включена послідовно з якірної обмоткою.
4. Двигуни зі змішаним збудженням (компаундні), у яких є послідовна СОВ і паралельна ШОВ обмотки збудження
2.3 Регулювання частоти обертання електродвигуна постійного струму
Частота обертання двигуна постійного струму:
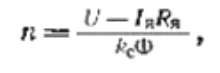
де U - напруга живильної мережі; Iя - струм якоря; Rя - опір ланцюг якоря; кс - коефіцієнт, що характеризує магнітну систему; Ф - магнітний потік електродвигуна.
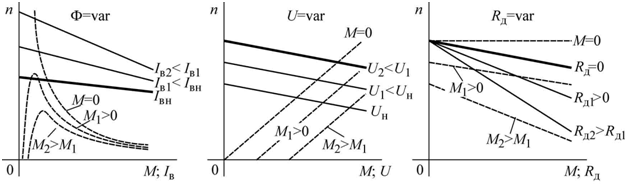
Рисунок 3 – Регулює швидкість ДПТ.
З формули видно, що частоту обертання електродвигуна постійного струму можна регулювати трьома шляхами: зміною потоку збудження електродвигуна, зміною підводиться до електродвигуна напруги і зміною опору в ланцюзі якоря.
Найбільш широке застосування отримали перші два способи регулювання, третій спосіб застосовують рідко: він неекономічний, швидкість двигуна при цьому значно залежить від коливань навантаження. Механічні характеристики, які при цьому виходять, показані на pисункy [3].
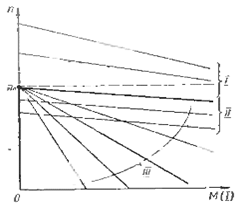
Рисунок 4 – Механічні характеристики електродвигуна постійного струму при різних способах регулювання частоти обертання.
2.4 Гальмування електродвигунів постійного струму
В електроприводах з електродвигунами постійного струму застосовують три способи гальмування: динамічне, рекуперативне і гальмування противовключением [6].
- Динамічне гальмування електродвигуна постійного струму здійснюється шляхом замикання обмотки якоря двигуна накоротко або через резистор. При цьому електродвигун постійного струму починає працювати як генератор, перетворюючи запасені їм механічну енергію в електричну. Ця енергія виділяється у вигляді тепла в опорі, на яке замкнута обмотка якоря. Динамічне гальмування забезпечує точну зупинку електродвигуна.
- Рекуперативне гальмування електродвигуна постійного струму здійснюється в тому випадку, коли включений в мережу електродвигун обертається виконавчим механізмом зі швидкістю, що перевищує швидкість ідеального холостого ходу. Тоді ЕРС наведена в обмотці двигуна, перевищить значення напруги мережі, струм в обмотці двигуна змінює напрямок на протилежний. Електродвигун переходить на роботу в генераторному режимі, віддаючи енергію в мережу. Одночасно на його валу виникає гальмівний момент. Такий режим може бути отриманий в приводах підйомних механізмів при опусканні вантажу, а також при регулюванні швидкості двигуна і під час гальмівних процесів в електроприводах постійного струму.
- Рекуперативне гальмування двигуна постійного струму є найбільш економічним способом, так як в цьому випадку відбувається повернення в мережу електроенергії. В електроприводі металорізальних верстатів цей спосіб застосовують при регулюванні швидкості в системах Г - ДПТ і ЕМУ - ДПТ.
- Гальмування противовключением електродвигуна постійного струму здійснюється шляхом зміни полярності напруги і струму в обмотці якоря. При взаємодії струму якоря з магнітним полем обмотки збудження створюється гальмівний момент, який зменшується в міру зменшення частоти обертання електродвигуна. При зменшенні частоти обертання електродвигуна до нуля електродвигун повинен бути відключений від мережі, інакше він почне розвертатися у зворотний бік.
3. Тиристорний перетворювач
3.1 Коротка інформіціі
Тиристорним перетворювачем постійного струму (ТП) є пристрій для перетворення змінного струму в постійний з регулюванням по заданому закону вихідних параметрів (струму і напруги). Тиристорні перетворювачі призначаються для харчування якірних ланцюгів двигунів та їх обмоток збудження.
Тиристорні перетворювачі складаються з наступних основних вузлів:
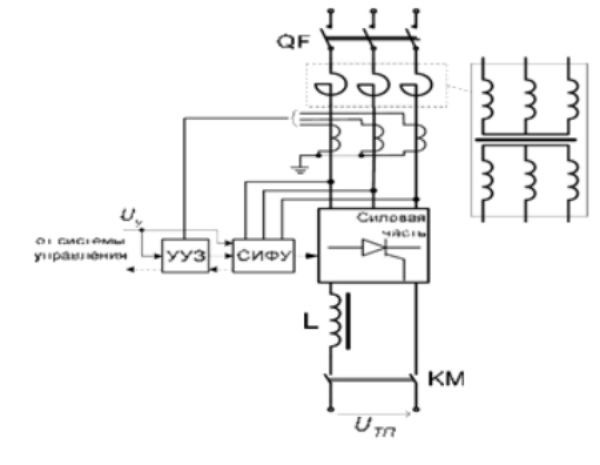
Трансформатор здійснює погодження вхідного і вихідного напруг перетворювача і (так само, як і струмообмежувальним реактор) обмеження струму короткого, замикання у вхідних ланцюгах. Згладжувальні реактори призначаються для згладжування пульсацій випрямлених напруги та струму. Реактори не передбачаються, якщо індуктивність навантаження достатня для обмеження пульсацій в заданих межах.
Застосування тиристорних перетворювачів постійного струму дозволяє реалізувати практично ті ж характеристики електроприводу, що і при використанні обертових перетворювачів в системах генератор-двигун (Г - Д), т. е. регулювати в широких межах частоту обертання і момент двигуна, отримувати спеціальні механічні характеристики і потрібний характер протікання перехідних процесів при пуску, гальмуванні, реверсі і т. д.
3.2 Схеми випрямлення, принципи побудови силових ланцюгів перетворювачів
Тиристорні перетворювачі виконуються з однофазними і багатофазними схемами випрямлення. Існує кілька розрахункових співвідношень основних схем випрямлення. Одна з таких схем показана на рис. 5, а. Регулювання випрямленої напруги Ua і струму Ia проводиться шляхом зміни кута керування. На рис. 5, б-д для прикладу показано характер зміни струмів і напруг у трифазній нульової схемою випрямлення при активно-індуктивному навантаженні [11].
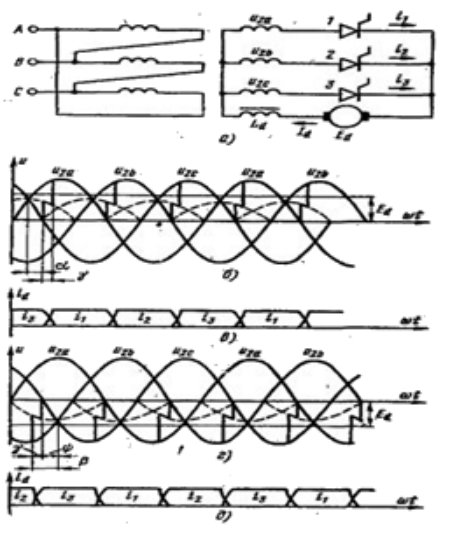
Рисунок 5 – Трифазна нульова схема (а) і діаграми зміни струму і напруги в випрямному (б, в) і інверторному (г, д) режимах.
Показаний на діаграмах кут (кут комутації), характеризує період часу, протягом якого струм протікає одночасно по двох тиристорам. Залежність середнього значення випрямленої напруги Ua від кута регулювання називається регулювальної характеристикою.
Для нульових схем середнє випрямлена напруга визначається з виразу [15].
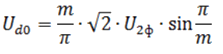
Де m - число фаз вторинної обмотки трансформатора; U2ф - діюче значення фазового напруги вторинної обмотки трансформатора.
Для мостових схем Udo в 2 рази вище, так як ці схеми еквівалентні послідовному включенню двох нульових схем.
У трифазної нульової схемою умови використання трансформатора при звичайно застосовуваних групах з'єднання Y/Y і трикутник/зірка гірше через наявність постійної складової потоку. Це призводить до збільшення перерізу магнітопроводу і, отже, розрахункової потужності трансформатора. Для виключення постійної складової потоку застосовують з'єднання вторинних обмоток трансформатора в зигзаг
, що також трохи збільшує розрахункову потужність. Збільшений рівень, пульсацій випрямленої напруги разом із зазначеним вище недоліком обмежує використання трифазної нульової схеми [17].
4. Привід постійного струму DCS 800 використовується в лабораторному стенді
4.1 Переваги DCS 800
Привід задовольняє самим жорстким вимогам таких електродвігательную установок як наприклад:
- Випробувальні стенди, шахтні підйомники, прокатні стани, а також таких установок без електродвигунів як;
- Електроліз - Магнітна техніка - Зарядні агрегати.
Вбудоване програмне забезпечення дозволяє моделювати всі класичні схеми: 12 - пульсная схему, системи спільного руху, дводвигунових схеми, управління реверсированием поля.

Рисунок 6 – Зовнішній вигляд комплектного перетворювача ABB DCS 800.
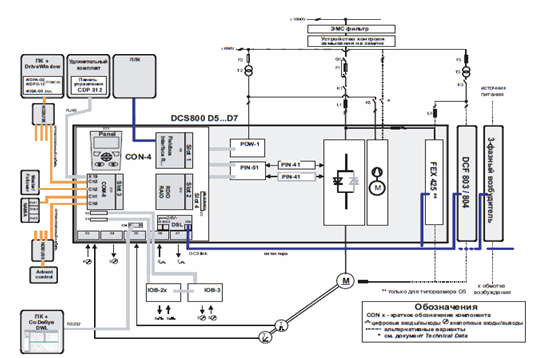
Рисунок 7 – Огляд компонентів перетворювача.
4.2 Базові програмні забезпечення
Програмне забезпечення DCS 800 містить базові функції регулювання швидкості, струму якоря, струму якоря і напруги на двигуні. Гнучка система адресації команд дозволяє здійснювати управління по послідовним інтерфейсам польової шини або системою ведучий-ведений, або за коштами сигналів від зовнішніх пристроїв керування, а також за змішаною системою [7].
Логічна структура приводу дозволяє конфігурувати приводу так, щоб його дії визначалися стандартом Profibus або відповідали класичним методам управління [10].
Доступ до всіх параметрів може здійснюватися або посредствам послідовної зв'язку, або за стандартом IEC 61131, або за коштами адаптивного програмування.
4.3 Система електроприводу Ведучий-Ведений
Привід з'єднаний за схемою Ведучий-Ведений. Якщо двигуни, приєднані до загального валу або механізму, обертаються з однаковою швидкістю і з однаковим крутним моментом.
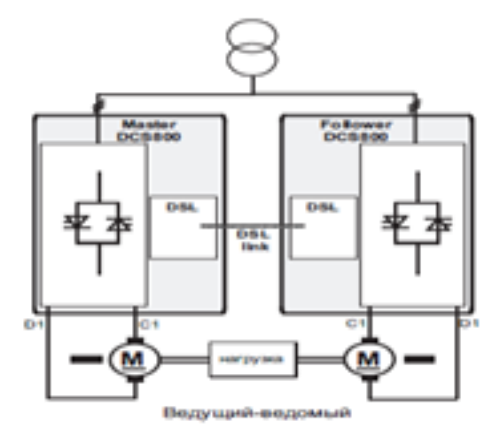
Рисунок 8 – З'єднання приводом по схемі Ведучий-Ведений
4.4 Плата зв'язку SDCS-COM-8
DCS 800 містить наступні інтерфейси для швидкої послідовної зв'язку по оптоволокну:
- DDCS протокол для зв'язку з контролером AC800M
- Розширення каналів DDCS через плату AIMA-01
- Зв'язок протоколів у схемі Ведучий-Ведений
- Зв'язок з ПК (програм DriveWindow), системою дистанційної діагностики Нетан, а також CDP 312 від ACS800
4.5 Функції базового програмування
Рисунок 9 – Розподіл клем за допомогою макросу.
(анімація: 5 кадрів, 6 циклов повторення, 433 кілобайт)
5. Плата 5710
5710 являє собою плату АЦП з високою роздільною здатністю, на якій також містяться пристрої введення/виводу дискретних сигналів [12].
Аналогова частина плати дозволяє проводити вимірювання з частотою 70 000 вимірювань в секунду. Ініціалізація перетворювача здійснюється або під управлінням плати обчислювача (процесорної плати) або за допомогою розташованого на платі 5710 лічильника/таймера. В останньому випадку вимірювання проводяться в фоновому режимі. Лічильник/таймер також може бути використаний для виконання часових вимірів загального призначення або для генерації ШІМ-сигналу.
До плати 5710 можуть бути підключені 16 уніполярних або 8 диференціальних аналогових сигналів. Роздільна здатність АЦП становить 12 розрядів про вхідному сигналі (-5 .. +5) В. Перемикання каналів здійснюється програмним способом. Допускається подавати на входи сигнали напругою до (-15 ... + 15) В за відсутності на платі напруги живлення. Розташований на платі підсилювач дозволяє змінювати коефіцієнт посилення х1, х10, х100 шляхом установки перемичок. Вхідний сигнал при цьому буде становити (+ -5) У, (+ -500) мВ і (+ -50) мВ сответственно.
Плата 5710 дозволяє виконувати до 33 000 вимірювань в секунду, а плата 5710-1 - 70000 вимірювань в секунду.
На платі також є 2 аналогових вихідних каналу. Вихідний сигнал також задається перемичками і може бути (0 .. 5) В, (+ -10) В або (+ -5) В.
Плата 5710 дозволяє працювати з 19 дискретними лініями введення/виводу. Лінії скомпоновані в 3 групи. Одна група з трьох ліній може працювати тільки на вихід, наступна група з 8 ліній може бути налаштована двома підгрупами по 4 лінії на вхід або на вихід, а третя група з 8 ліній також може бути налаштована на вхід або на вихід, але всією групою цілком.
На платі також доступні програмісту три 16-ти розрядних лічильника/таймера. Перший лічильник/таймер є дільником для вхідного сигналу частотою 4 Мгц. Коефіцієнт розподілу може здаватися програмно. Другий лічильник/таймер використовується в якості подільника частоти, що надходить з першого лічильника/таймера і формує періодичний сигнал для запуску аналого-цифрового перетворювача. При цьому період опитування може бути від 40000 вимірювань в секунду до 3 вимірювань на годину. Останній лічильник може бути використаний як лічильник/таймер загального призначення, при цьому його вхідні і вихідні лінії виводяться на роз'єм дискретного порту, а вхід може бути підключений до внутрішнього генератору 4 МГц за допомогою перемичок.
Висновки
Створена універсальна експериментальна установка з можливістю практичної реалізації, управління та спостереження різних електромеханічних систем. Засобом моделювання в установці реалізований механізм
імітації різних технологічних процесів. Реалізовано алгоритми управління двигуном постійного струму (ДПТ), проведено експериментальні дослідження роботи електроприводу. Особливістю установки є можливість реалізації алгоритмів керування практично будь-якої складності і виключно на програмному рівні, що важливо і в навчальному процесі. Це відкриває широкі можливості при модернізації діючих електроприводів шляхом перепрограмування. Установка вже використовується як полігон для апробації нових алгоритмів керування при підготовці аспірантів і магістрів, а також при проведенні практичних і лабораторних робіт з дисциплін Комплектні електроприводи
[14].
При написанні цього реферату магистреская робота ще не завершена. Остаточне завершення: грудень 2014 року. Повний текст роботи і матеріали по темі можуть бути отримані у автора або його керівника після вказаної дати. Ця частина реферату виключно оглядова. Подальша робота буде спрямована на эксперементальное дослідження і доопрацювання наявних результатів у сфері цифрових систем керування [13].
Список джерел
- Чермалых В. М. Идентификация параметров физической и виртуальной моделей частотно-регулируемого асинхронного электропривода / Национальный технический университет Украины
КПИ
, г. Киев / Проблеми енергоресурсозбереження в електротехнічних системах. Наука, освіта і практика № 1/2011 (1) с. 54-55 - Полилов Е.В. Исследовательский стенд дляя апробации алгоритмов управления сложными электрическими системпми. / Украина Алчевск с. 481-487
- Передерий А.В. Імітація навантаження електроприводу поздовжньо-стругального верстату / Наукові праці Донецького національного технічного університету с. 133-137
- Толочко О.И. К вопросу об изменении типовых структур цифровых систем управления комплектными электроприводами / Наукові праці Донецького національного технічного університету с. 188-193
- Прітченко О.В. Концепция построения малогабаритных лабораторных стендов / Кременчуцький державний університет імені Михайла Остроградського / Електромеханічні і енергозберігаючі системи. Випуск 2/2010 (10).
- Гладырь А.И. Лабораторный комплекс для иследования процесса трогания производственных механизмов / Кременчугский государственный политехнический университет имени Михаила Остроградского.
- Голдсуорт Б. Проектирование цифровых логических устройств / Б. Голдсуорт. – М.: Машиностроение, 1985. – 288 с.
- Шинкаренко В. Ф. Лабораторный комплекс для исследования статических и динамических харакетристик асинхронных машин / Електромеханічні і енергозберігаючі системи. Випуск 2/2012 (18) с. 113-115
- Орловський І. А. Модернизация лабораторного стенда подвесного конвейера Part_2-8 / Електромеханічні і енергозберігаючі системи. Випуск 2/2013 (22). Частина 2 с. 427-431
- Орловський І. А. Модернизация оборудованием фирмы VIPA лабораторного стенда с манипулятором М10П / Електромеханічні і енергозберігаючі системи. Випуск 3/2012 (19) с. 597-599
- Полилов Е.В. Практическая реализация и исследование релейно-робастных алгоритмов управления синхронными электродвигателями Сборник ХПИ 2010-3 / Теоретические вопросы 98 автоматизированного электропривода с. 90-98
- Заквасов В.В. Программно-аппаратный комплекс для исследования встроенных систем управления / Електромеханічні і енергозберігаючі системи. Випуск 1/2010 (9)
- Кореньков Э. В. Регулирование технологических параметров гидротанспортных систем с использованием исследовательского комплекса-тренажёра / Електромеханічні і енергозберігаючі системи. Випуск 2/2013 (22) с. 117-125
- Бондаренко В.І. Современные подходы и методы изложения прикладных дисциплин при подготовке специалистов по электромеханике Сборник ХПИ 2010-21 / Учебный процесс. Дискуссии с. 558-559
- Петров Д. СТА Применение в учебном процессе современных средств разработки СРВ
- Ефимов И.Г. Стенд для исследований частотно-регулируемых электроприводов / 5 международная конференция по автоматизированому электроприводу АЭП-2007 Санкт-Петербург, 18-21 сентябрь 2007 с. 216-218
- Сердюк А. А. Экспериментальный комплекс гидротранспортной установки для исследования кавитационных систем / Проблеми енергоресурсозбереження в електротехнічних системах. Наука, освіта і практика № 1/2011 (1)