
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования, планируемые результаты
- 3. Основные вопросы, которые должны быть разрешены в данной работе
- 4. Обзор способов частотного регулирования
- 4.1 Система скалярного частотного управления
- 4.2 Система векторного управления
- 4.3 Система прямого управления моментом
- Выводы
- Список источников
Введение
Шахтная подъемная установка (ШПУ) — сложная механическая система, состоящая из следующих элементов: сосудов, органов навивки, зубчатых передач, двигателей, шкивов, соединенных упругими элементами: канатами, валопроводами, пружинными муфтами. Они обеспечивают выдачу полезного ископаемого, а также перемещение людей и грузов. Поэтому надежность и производительность работы подъемной установки является крайне важной характеристикой.
Рисунок 1 – Подъем и спуск скипа в стволе шахты.
(анимация: 8 кадров, 5 циклов повторения, 184 килобайт)
Асинхронный короткозамкнутый двигатель обеспечивает высокую надёжность при его эксплуатации, а также является наиболее экономичным по энергопотреблению. Однако имеет существенный недостаток – плохие регулировочные свойства. Поэтому ранее применялся для привода нерегулируемых механизмов или регулируемых в малом диапазоне. В настоящее время разработаны и продолжают разрабатываться новые системы управления (векторное управление, частотно–токовое управление, прямое управление моментом), позволяющие наиболее максимально приблизить АДКЗ по его регулировочным свойствам к двигателю постоянного тока, расширить область его применения [5].
В связи с резким повышением стоимости электроэнергии экономичность работы системы на постоянном токе значительно снизилась, поэтому тенденцией настоящего времени является переход на энергосберегающие системы переменного тока, в числе которых необходимо отметить преобразователь частоты–асинхронный двигатель (ПЧ–АД)
Применение систем ПЧ–АД позволяет снизить стоимость оборудования, сформировать желаемую тахограмму движения и обеспечить работу системы с высокими энергетическими показателями. В качестве ПЧ могут использоваться преобразователи с непосредственной связью, или со звеном постоянного тока [2].
1.Актуальность темы
Актуальность данной работы обусловлена, прежде всего тем, что управление электродвигателем переменного тока существенно улучшилось за последние два десятилетия. Это стало тенденцией благодаря новым методам управления и идеям, выдвигаемыми исследователями со всего мира а значит, что в скором времени найдет свое применение и в шахтной и других отраслях промышленности.
2. Цель и задачи исследования, планируемые результаты
Целью данной работы является исследование переходных процессов, происходящих в системе ШПУ, при использовании различных законов частотного регулирования. Анализ будет осуществляться с помощью математического моделирования в программном пакете MATLAB.
3. Основные вопросы, которые должны быть разрешены в данной работе
- Моделирование переходных процессов в в системе ШПУ при различных законах регулирования и учетом различных факторов, таких как: изменение массы за счет навивания подъемного каната, изменение радиуса барабана
- Создания собственного лабораторного стенда для проверки данных полученных в результате моделирования
- Проведение дальнейших исследований и доработок
- Анализ полученных данный и вывод о целесообразности применения исследуемых способов регулирования
4. Обзор способов частотного регулирования
4.1 Система скалярного частотного управления
Асинхронный ЭП со скалярным частотным управлением используется для механизмов средней и малой мощности, не требующих глубокого регулирования скорости (чаще диапазон регулировки ограничен показателем 10:1) и высокого качества переходных процессов [1].
Частотное управление заключается в обеспечении нужных статических характеристик системы ЭП путем выполнения определенного соотношения между амплитудой и частотой напряжения, которое прикладывается к статору АД. Функциональная схема системы представлена на рис.1

Рисунок 2 – Функциональная схема система скалярного частотного управления
К системам частотного скалярного управления, как правило, не предъявляют высоких требований по точности и по качеству переходных процессов. В то же время такие системы, даже без использования ОС по скорости, позволяют получить механические характеристики с жесткостью, не уступающей жесткости характеристик, обеспечиваемых в СУЭП постоянного тока. Кроме жесткости характеристик, важным требованием к системам скалярного управления является обеспечение перегрузочной способности АД по максимальному (критическому) моменту не ниже заданного уровня.
Ввиду простоты реализации скалярного принципа управления разомкнутые и замкнутые системы «ПЧ – АД» со скалярным управлением имеют очень большое распространение. Для обеспечения требуемых жесткости характеристик и перегрузочной способности в функциональном преобразователе ФП реализуют определенную зависимость между напряжениями задания частоты

соответствующее так называемому закону частотного управления Эта зависимость для напряжений задания, соответствующих может иметь линейный или нелинейный характер.
Закон управления обеспечивает требуемые характеристики ЭП в первой зоне (вниз от номинальной частоты), а при необходимости регулирования скорости АД выше номинальной. Точку, соответствующую границе зон регулирования скорости на характеристике ФП, называют точкой гашения поля.
Диапазон регулирования скорости в разомкнутой системе обычно не превышает 10:1 (при постоянной нагрузке). Ограничение токов и моментов при пуске АД достигается в разомкнутой системе включением в цепь управления задатчика интенсивности [6].
Основной недостаток систем скалярного частотного управления заключается в трудности реализации качественного регулирования в переходных динамических режимах, в т.ч. ограничения координат ЭП (напряжений, токов, моментов) при возможных перегрузках со стороны механизма или отклонениях напряжения питающей сети. Причиной этому является сложность электромагнитных процессов, протекающих в АД.
4.2 Система векторного управления
Векторное управление, в отличие от скалярного, предполагает обеспечение закона частотного управления не только в установившихся, но и в переходных режимах работы ЭП. Это позволяет обеспечить высокое качество характеристик ЭП как в статике, так и в динамике [3]. При векторном управлении моментом и скоростью короткозамкнутого АД наибольшее распространение получил закон управления
заключающийся в непрерывной текущей стабилизации как модуля, так и углового положения вектора потокосцепления ротора. Данный закон позволяет получить наилучшие статические характеристики, и в то же время характеризуется наиболее простым алгоритмом реализации.
Для реализации закона управления система регулирования строится в системе координат, традиционно обозначаемой d, q, ориентированной по вектору потокосцепления ротора, когда вещественная ось d системы координат строго совмещается с обобщенным вектором потокосцепления ротора.

Функциональная схема изображена на рис. 3. Силовая часть системы содержит ПЧ на основе автономного инвертора напряжения с ШИМ и короткозамкнутый АД.
В системе предусматривается непосредственное измерение фазных токов статора в двух фазах (датчики тока ДТА и ДТС), скорости.
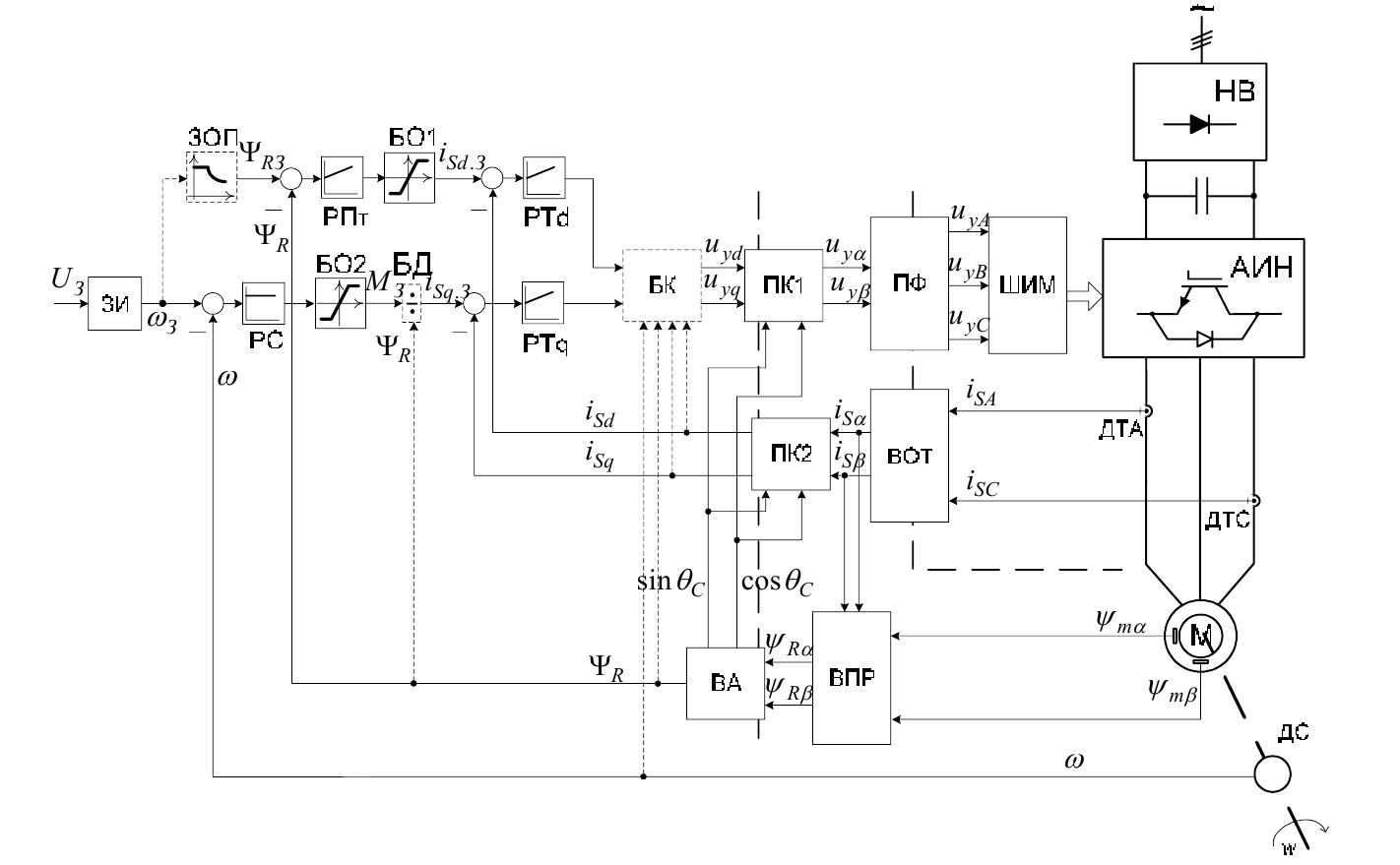
Рисунок 3 – Функциональная схема системы векторного управления
Основными недостатками системы принято считать:
- Сложность системы регулирования и громоздкость вычислений, связанных с необходимостью ориентации системы координат. Поэтому в настоящее время реализация систем векторного управления выполняется только средствами микропроцессорной техники [7]. Разработанные в 1970–х–1980–х гг. устройства аналоговой реализации систем векторного управления не получили широкого распространения в промышленности из–за вносимых погрешностей регулирования и дрейфа параметров элементов.
- Неэффективность измерения потокосцепления ротора с помощью датчиков Холла (или дополнительных измерительных обмоток) из–за их низкой надежности. В настоящее время вместо непосредственного измерения потока используют его косвенное определение с помощью математических моделей потока или наблюдателей, которые строятся на основании математической связи вектора потокосцепления с векторами электрических величин, а также скорости АД, легкодоступных для измерения.
4.3 Система прямого управления
Прямое управление моментом (DTC) является развитием векторного подхода к построению систем управления АД. Первые промышленные образцы систем DTC, разработанные фирмой ABB, появились в середине 1990–х годов. Задачей DTC является обеспечение быстрой реакции электромагнитного момента АД на управляющее воздействие. В отличие от векторного управления, где управление моментом выполняется через управление током статора, в системе с DTC управляют потокосцеплением статора [4]. Функциональная схема изображена на рис. 4
Принцип управления: если поддерживать постоянство модуля потокосцепления статора, то электромагнитный момент можно изменить столь же быстро, сколь быстро можно изменить угол тэта. Обе эти задачи могут быть выполнены путем воздействия на обобщенный вектор напряжения статора.
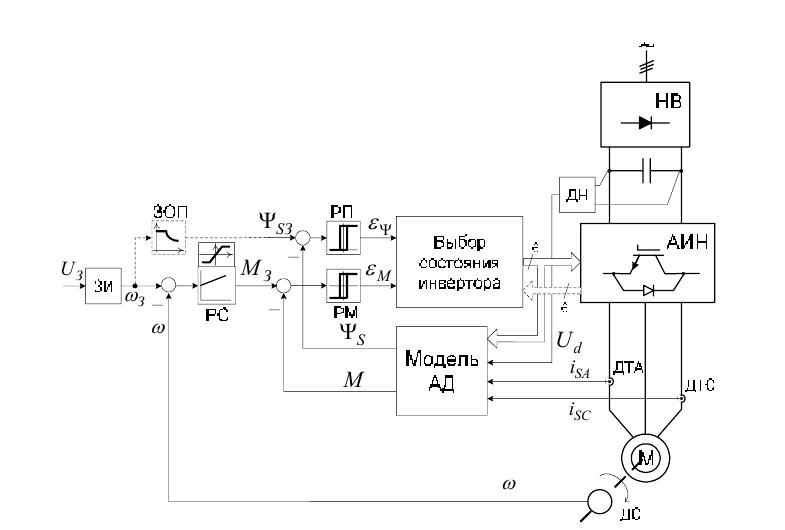
Рисунок 4 – Функциональная схема системы прямого управления
- Достоинствами системы DTC являются:
- простота реализации, аппаратная часть едина и универсальна для различных типов асинхронных двигателей;
- высокое быстродействие – время отработки задания момента от 1,0…1,5 мс;
- малая чувствительность к изменению параметров АД. В то же время, недостатками системы DTC являются:
- относительно большие флуктуации момента, вследствие которых снижается точность регулирования момента;
- худшая форма тока по сравнению с системами векторного управления;
- непостоянство частоты коммутации, которая в общем случае зависит от частоты, а также от заданного значения момента.
- Усовершенствование алгоритма выбора состояния ключей инвертора;
- Использование «частичного использования вектора» за интервал дискретности (“duty cycle”);
- Использование усовершенствованной ШИМ, суть которой заключается в прогнозировании наперед на некоторый промежуток времени степени ухудшения показателей качества системы, и формирования вектора напряжения статора с учетом необходимости коррекции этих показателей.
Выводы
В работе рассмотрены основные способы частотного управления АД с короткозамнутым ротором, а также выделены их достоинства и недостатки. Можно заметить, что системы отличаются не только по качеству, которое они могут обеспечить, но и сложности реализации.
Цель работы состоит в том, чтобы представить непредвзятое сравнение способов регулирования, чтобы позволить пользователям выбрать более подходящее решение для любой задачи, которая требует качественного регулирования скорости.
Так как данная работа на момент создания сайта еще находится в процессе выполнения, то трудно делать какие либо выводы, т.к. предстоит сравнить результаты полученные в результате численного моделирования с результаты полученными на практике. Можно лишь сказать что внедрение АД с короткозамкнутым ротором является важной задачей, которая в дальнейшем позволит не только увеличить производительность, но и сделать привод более экономичным, что в связи с ростом стоимости электроэнергии является актуальной задачей
Список источников
- Чекавский Г.С. Конспект лекция по СУЭП, ДонНТУ, каф. ЭАПУ, 2012 г.
- Усольцев А.А. Общая электротехника // Учебное пособие. СПб.: СПбГУ ИТМО, 2009. - 301 с.
- Виноградов А.Б. Векторное управление электроприводами переменного тока / ГОУВПО «Ивановский государственный энергетический университет имени В.И. Ленина». – Иваново, 2008. – 298 с.
- Шавелкин А.А. Энергосберегающий высоковольтный преобразователь частоты с прямым управлением асинхронным двигателем / Шавелкин А.А., Сажин В.А., Прокопенко И.В. // Науково-практична конференція "Донбас 2020: наука і техніка - виробництву", 5-6 лютого 2002 р., Донецьк.
- Чиликин М.Г., Сандлер А.С. Общий курс электропривода. - М.: Энергоиздат, 1981. - 576 с.
- Толочко О.И., Чекавский Г.С. Моделирование систем электропривода переменного тока. Лабораторный практикум [электронный ресурс] – Режим доступа: http://www.twirpx.com/file/71461/
- Matlab R2013a documentation center [электронный ресурс] – Режим доступа: http://www.mathworks.com/help/documentation-center.html