
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і завдання дослідження, плановані результати
- 3. Основні питання, які повинні бути розвязані у даній роботі
- 4. Огляд способів частотного регулювання
- 4.1 Система скалярного частотного управління
- 4.2 Система векторного керування
- 4.3 Система прямого управління
- Висновки
- Перелік посилань
Вступ
Шахтна підіймальна установка (ШПУ) — складна механічна система, що складається з наступних елементів: судин, органів навивки, зубчастих передач, двигунів, шківів, з'єднаних пружними елементами: канатами, валопроводами, пружинними муфтами. Вони забезпечують видачу корисної копалини, а також переміщення людей і вантажів. Тому надійність і продуктивність роботи підйомної установки є вкрай важливою характеристикою.
Рисунок 1 – Підйом і спуск скіпа в стволі шахти.
(анімація: 8 кадрів, 5 циклів повторення, 184 кілобайт)
Асинхронний короткозамкнений двигун забезпечує високу надійність при його експлуатації, а також є найбільш економічним по енергоспоживанню. Проте має істотний недолік—погані регулювальні властивості. Тому раніше застосовувався для приводу нерегульованих механізмів або регульованих у малому діапазоні. В даний час розроблені і продовжують розроблятися нові системи управління (векторне керування, частотно –струмове управління, пряме управління моментом), що дозволяють найбільш максимально наблизити АДКЗ за його регулювальним властивостями до двигуна постійного струму, розширити область його застосування [5].
У зв'язку з різким підвищенням вартості електроенергії економічність роботи системи на постійному струмі значно знизилася, тому тенденцією теперішнього часу є перехід на енергозберігаючі системи змінного струму, в числі яких необхідно відзначити перетворювач частоти–асинхронний двигун (ПЧ-АД)
Застосування систем ПЧ–АД дозволяє знизити вартість обладнання, сформувати бажану тахограммой руху і забезпечити роботу системи з високими енергетичними показниками. В якості ПЧ можуть використовуватися перетворювачі з безпосереднім зв'язком, або з ланкою постійного струму [2].
1.Актуальність теми
Актуальність даної роботи обумовлена, перш за все тим, що управління електродвигуном змінного струму істотно поліпшилося за останні два десятиліття. Це стало тенденцією завдяки новим методам управління та ідеям, висунутими дослідниками з усього світу а значить, що незабаром знайде своє застосування і в шахтної та інших галузях промисловості.
2.Мета і завдання дослідження.
Метою даної роботи є дослідження перехідних процесів, що відбуваються в системі ШПУ, при використанні різних законів частотного регулювання. Аналіз здійснюватиметься за допомогою математичного моделювання в програмному пакеті MATLAB.
3. Основні питання, які повинні бути розвязані у даній роботі
- Моделювання перехідних процесів в в системі ШПУ при різних законах регулювання та урахуванням різних факторів, таких як: зміна маси за рахунок навівання підйомного каната, зміна радіуса барабана
- Створення власного лабораторного стенду для перевірки даних отриманих в результаті моделювання
- Проведення подальших досліджень і доопрацювання
- Аналіз отриманих даних і висновок про доцільність застосування досліджуваних способів регулювання
4. Огляд способів частотного регулювання
4.1 Система скалярного частотного управління
Асинхронний ЕП зі скалярним частотним керуванням використовується для механізмів середньої і малої потужності, які не потребують глибокого регулювання швидкості (частіше діапазон регулювання обмежений показником 10:1) і високої якості перехідних процесів [1].
Частотне управління полягає в забезпеченні потрібних статичних характеристик системи ЕП шляхом виконання певного співвідношення між амплітудою і частотою напруги, яка прикладається до статора АД. Функціональна схема системи представлена на рис.1

Рисунок 2 – Функциональна схема системи скалярного частотного керування
До систем частотного скалярного управління, як правило , не пред'являють високих вимог по точності і за якістю перехідних процесів . У той же час такі системи , навіть без використання ЗЗ за швидкістю , дозволяють отримати механічні характеристики з жорсткістю , яка не поступається жорсткості характеристик , забезпечуваних в СКЕП постійного струму. Крім жорсткості характеристик , важливою вимогою до систем скалярного управління є забезпечення перевантажувальної здатності АД по максимальному ( критичного ) моменту не нижче заданого рівня.
Зважаючи на простоту реалізації скалярного принципу управління розімкнуті і замкнуті системи «ПЧ–АД» зі скалярним керуванням мають дуже велике поширення. Для забезпечення необхідних жорсткості характеристик і перевантажувальної здатності у функціональному перетворювачі ФП реалізують певну залежність між напругою завдання частоти

відповідне так званому закону частотного керування Ця залежність для напруг завдання, відповідних може мати лінійний або нелінійний характер.
Закон управління забезпечує необхідні характеристики ЕП в першій зоні (вниз від номінальної частоти), а при необхідності регулювання швидкості АД вище номінальної. Точку, відповідну межі зон регулювання швидкості на характеристиці ФП, називають точкою гасіння поля.
Діапазон регулювання швидкості в розімкнутої системі зазвичай не перевищує 10:1 (при постійному навантаженні). Обмеження струмів і моментів при пуску АД досягається в розімкнутої системі включенням в ланцюг управління задавача інтенсивності [6].
Основний недолік систем скалярного частотного управління полягає в труднощі реалізації якісного регулювання в перехідних динамічних режимах, в т.ч. обмеження координат ЕП (напруг, струмів, моментів) при можливих перевантаженнях з боку механізму або відхиленнях напруги живильної мережі. Причиною цьому є складність електромагнітних процесів, що протікають в АД.
4.2 Система векторного керування
Векторне управління, на відміну від скалярного, передбачає забезпечення закону частотного керування не тільки в сталих, але і в перехідних режимах роботи ЕП [3]. Це дозволяє забезпечити високу якість характеристик ЕП як у статиці, так і в динаміці. При векторному керуванні моментом і швидкістю короткозамкненого АД найбільшого поширення набув закон управління
що полягає в безперервній поточної стабілізації як модуля, так і кутового положення вектора потокозчеплення ротора. Даний закон дозволяє отримати найкращі статичні характеристики, і в той же час характеризується найбільш простим алгоритмом реалізації.
Для реалізації закону керування система регулювання будується в системі координат, що традиційно позначається d, q, орієнтованої за вектором потокозчеплення ротора, коли вісь d системи координат строго поєднується з узагальненим вектором потокозчеплення ротора.

Функціональна схема зображена на рис. 3. Силова частина системи містить ПЧ на основі автономного інвертора напруги з ШІМ і короткозамкнутий АД.
В системі передбачається безпосереднє вимірювання фазних струмів статора у двох фазах (датчики струму ДТА і ДТС), швидкості.
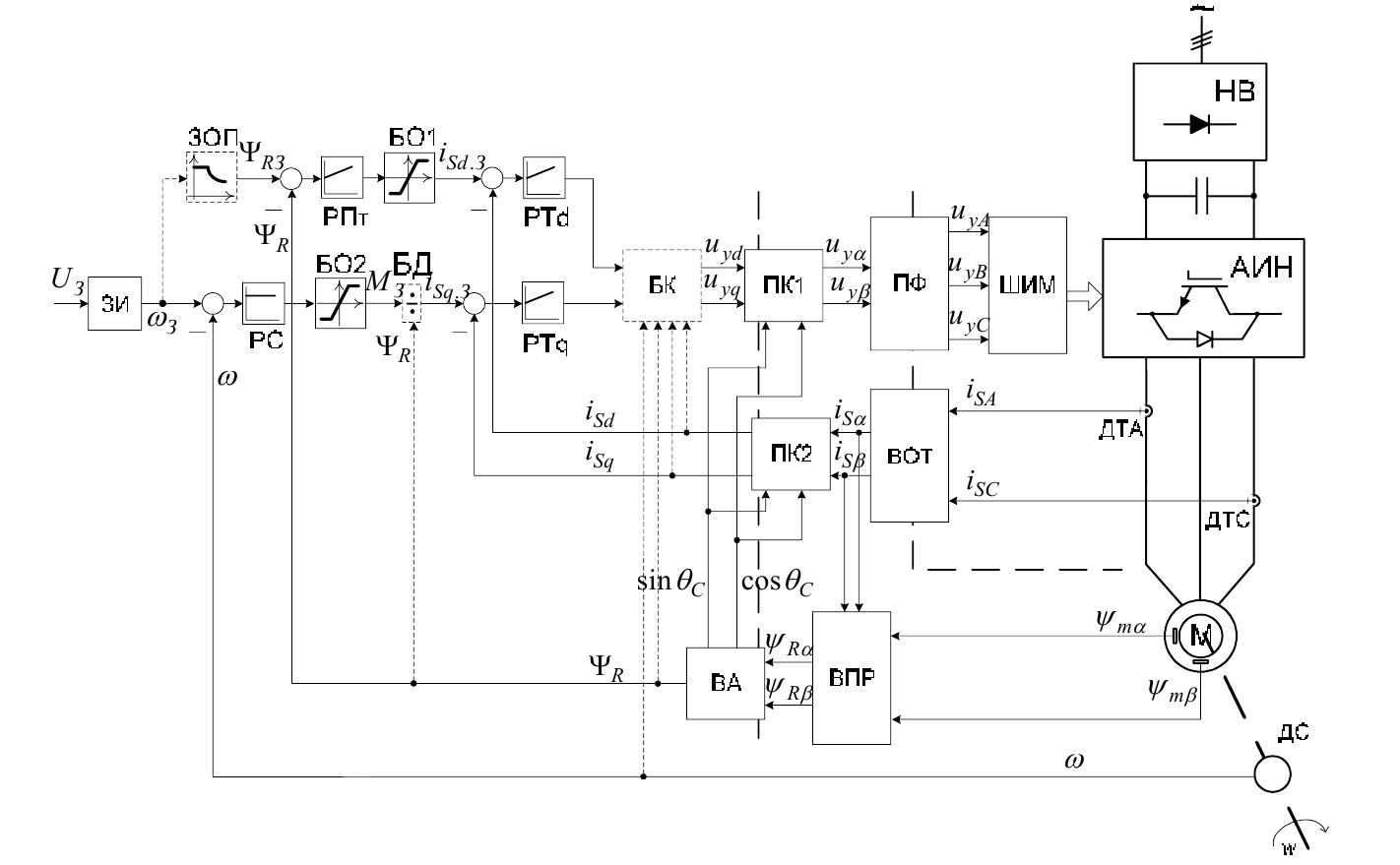
Рисунок 3 – Функціональна схема системи векторного керування
Основними недоліками системи прийнято вважати:
- Складність системи регулювання і громіздкість обчислень, пов'язаних з необхідністю орієнтації системи координат. Тому в даний час реалізація систем векторного управління виконується тільки засобами мікропроцесорної техніки [7]. Розроблені в 1970–х– 1980–х рр. пристрої аналогової реалізації систем векторного управління не набули широкого поширення в промисловості через похибки регулювання та дрейфу параметрів елементів.
- Неефективність вимірювання потокозчеплення ротора за допомогою датчиків Холла (або додаткових вимірювальних обмоток) через їх низьку надійність. В даний час замість безпосереднього вимірювання потоку використовують його непряме визначення за допомогою математичних моделей потоку або спостерігачів, які будуються на підставі математичної зв'язку вектора потокозчеплення з векторами електричних величин, а також швидкості АД, легкодоступних для вимірювання.
4.3 Система прямого управління
Пряме управління моментом (DTC) є розвитком векторного підходу до побудови систем управління АД. Перші промислові зразки систем DTC, розроблені фірмою ABB, з'явилися в середині 1990–х років. Завданням DTC є забезпечення швидкої реакції електромагнітного моменту АД на керуючий вплив. На відміну від векторного управління, де управління моментом виконується через управління струмом статора, в системі з DTC управляють потокозчепленням статора [4]. Функціональна схема зображена на рис. 4
Принцип управління: якщо підтримувати сталість модуля потокозчеплення статора, то електромагнітний момент можна змінити настільки ж швидко, наскільки швидко можна змінити кут тета. Обидві ці завдання можуть бути виконані шляхом впливу на узагальнений вектор напруги статора.
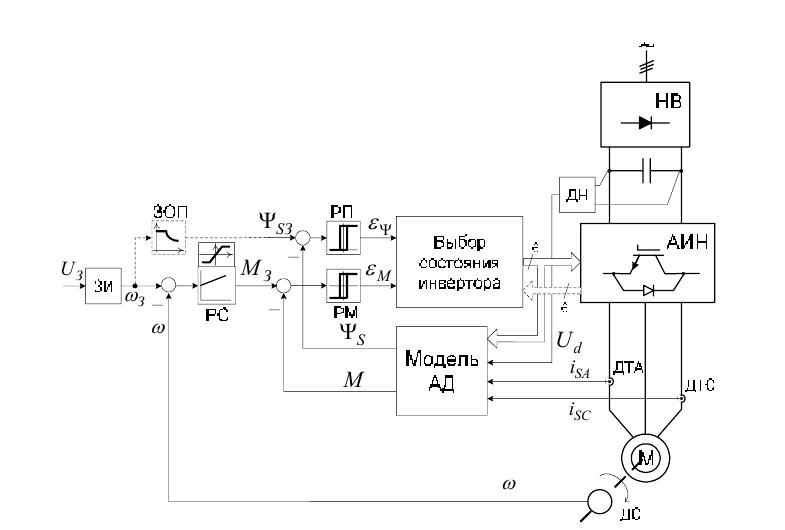
Рисунок 4 – Функціональна схема системи прямого управління
- Перевагами системи DTC є:
- простота реалізації, апаратна частина єдина і універсальна для різних типів асинхронних двигунів;
- висока швидкодія–час відпрацювання завдання моменту від 1,0 ... 1,5 мс;
- мала чутливість до зміни параметрів АД. Водночас, недоліками системи DTC є:
- відносно великі флуктуації моменту, внаслідок яких знижується точність регулювання моменту;
- найгірша форма струму в порівнянні з системами векторного управління;
- непостійність частоти комутації, яка в загальному випадку залежить від частоти, а також від заданого значення моменту.
- Удосконалення алгоритму вибору стану ключів інвертора;
- Використання «часткового використання вектора» за інтервал дискретності (“duty cycle”);
- Використання удосконаленої ШІМ, суть якої полягає в прогнозуванні наперед на деякий проміжок часу ступеня погіршення показників якості системи, і формування вектора напруги статора з урахуванням необхідності корекції цих показників.
Висновки
У роботі розглянуті основні способи частотного керування АД з короткозамнутим ротором, а також виділені їх переваги і недоліки. Можна помітити, що системи відрізняються не тільки за якістю, яке вони можуть забезпечити, але і складності реалізації.
Мета роботи полягає в тому, щоб представити неупереджене порівняння способів регулювання, щоб дозволити користувачам вибрати більш відповідне рішення для будь–якої задачі, яка вимагає якісного регулювання швидкості.
Так як дана робота на момент створення сайту ще знаходиться в процесі виконання, то важко робити якісь висновки, тому що належить порівняти результати отримані в результаті чисельного моделювання з результати отриманими на практиці. Можна лише сказати що впровадження АД з короткозамкненим ротором є важливим завданням, яка в подальшому дозволить не тільки збільшити продуктивність, але і зробити електропривід більш економічним, що у зв'язку із зростанням вартості електроенергії є актуальним завданням
Перелік посилань
- Чекавский Г.С. Конспект лекция по СУЭП, ДонНТУ, каф. ЭАПУ, 2012 г.
- Усольцев А.А. Общая электротехника // Учебное пособие. СПб.: СПбГУ ИТМО, 2009. - 301 с.
- Виноградов А.Б. Векторное управление электроприводами переменного тока / ГОУВПО «Ивановский государственный энергетический университет имени В.И. Ленина». – Иваново, 2008. – 298 с.
- Шавелкин А.А. Энергосберегающий высоковольтный преобразователь частоты с прямым управлением асинхронным двигателем / Шавелкин А.А., Сажин В.А., Прокопенко И.В. // Науково-практична конференція "Донбас 2020: наука і техніка - виробництву", 5-6 лютого 2002 р., Донецьк.
- Чиликин М.Г., Сандлер А.С. Общий курс электропривода. - М.: Энергоиздат, 1981. - 576 с.
- Толочко О.И., Чекавский Г.С. Моделирование систем электропривода переменного тока. Лабораторный практикум [электронный ресурс] – Режим доступа: http://www.twirpx.com/file/71461/
- Matlab R2013a documentation center [электронный ресурс] – Режим доступа: http://www.mathworks.com/help/documentation-center.html