
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета, завдання дослідження та передбачувані результати
- 3. Аналітичний огляд
- 4. Дослідницька частина
- 4.1 Робот-маніпулятор Katana
- 4.2 Система керування роботом-маніпулятором для одного ступеня свободи
- 4.3 Алгоритм податливості
- 4.4 Алгоритм адаптивної податливості
- Висновок
- Список джерел
Вступ
З збільшенням складності сучасних технічних систем виникає вкрай важливе завдання спрощення роботи з ними, а також придушення випадкових факторів (збурень), які негативно впливають на їх роботу. Так як біологічні системи вкрай складні, подібні питання стоять в них навіть більш гостро. Таким чином, способи вирішення інженерних завдань, що використовуються природою, можуть бути перенесені і на штучні системи, що виконують схожі функції.
У роботах зі складною поведінкою не можна передбачити спектр механічних впливів, яким він буде наражений. Таким чином, необхідний механізм, здатний пригнічувати небажані впливи, або здатний реєструвати і відповідати на них. У природі, для цих цілей використовується еластичність і податливість.
Так як механічні частини роботів дуже жорсткі й погано переносять надмірні навантаження, порушуючи цілісність передавальних механізмів, при випадкових механічних впливах на робота, потрібен механізм, який би знижував і демпфував надлишкове навантаження.
Використовуючи систему керування приводами робота можна добитися ефекту податливості для кожної з його рухомих частин, в тому числі, й нижче власного моменту опору передачі, для відгуку на дуже слабкі впливи.
Крім того, ця властивість застосовна для вирішення багатьох задач.
1. Актуальність теми
Механізм податливості допомагає у вирішенні відразу декількох задач. Однією з них є взаємодія з роботом без будь-якого додаткового інтерфейсу. Рішення даної задачі буде основним для даної роботи, так як не вимагає додаткових механізмів.
Податливість дозволяє як розширити кількість доступних взаємодій робота з людиною, так і уникнути можливого травматизму, якщо приводи маніпуляторів досить потужні.
Також його ж можна використовувати для програмування робота. Записувати інформацію о русі під час того, як людина самостійно пересуває маніпулятор, не докладаючи для цього зусиль. Цей механізм вкрай актуальний, оскільки однією з причин складності впровадження роботів є складнощі з його програмуванням та обслуговуванням. З появою можливості запрограмувати рух робота, просто переміщаючи робочий орган або дублюючі пристрій в потрібне положення вручну, складності з програмуванням є виключеними.
Ще одним застосуванням є захист від надмірних навантажень. Використовуючи змінювані в залежності від сили та характеру зовнішнього навантаження упорні, або екскаваторні характеристики, можна розподілити навантаження між усіма приводами робота або зупинити його, не перевищив припустиме значення.
Також важливою властивістю податливості і пружності, як механізму, який проявляється при змаганні між завданням, яке виконує робот і механізмом, що зумовлює його податливість, є придушення небажаних коливань і пристосовування до особливостей поверхонь з якими працює робот. Для крокуючих роботів, це дозволяє уникнути розхитування, пов'язаного з рухом і пристосуватися до нерівностей поверхні, якою крокує робот.
Для роботів-маніпуляторів - придушити коливання вантажу, якщо вони виникають, або інші пружні коливання, пов'язані з різкою зміною навантаження. Також це дозволяє роботу щільно обхопити предмет неправильної форми або крихкий предмет, не перевищуючи тиску, який призведе до його пошкодження.
2. Мета, завдання дослідження та передбачувані результати
На основі наявного робота-маніпулятора Katana зробити систему податливості, що адаптується для одного ступеня свободи. Отримати графіки, які відображають роботу системи. Вивчити вплив зміни коефіцієнтів ПІД регулятора на роботу системи. Отримати залежності, які показують вплив коефіцієнтів на роботу алгоритму і налагодити роботу системи, враховуючи цей фактор.
Для досягнення даної мети в роботі треба вирішити такі завдання:
- Скласти вільно програмовану систему керування з достатньою швидкодією, пристосовану для керування приводом робота - маніпулятора.
- Скласти програму, що виконує ПІД-регулювання з контурами струму, швидкості та положення. Дослідити роботу системи, знайти оптимальні коефіцієнти.
- Скласти та запрограмувати алгоритм, що забезпечує податливість.
- Запрограмувати нейронну мережу, яка дозволила б адаптувати коефіцієнти ПІД регулятора до зовнішніх навантажень залежно від заданої податливості.
- Отримати результати роботи системи та проаналізувати вплив коефіцієнтів ПІД регулятора на механізм податливості.
Об'єкт дослідження: Робот-маніпулятор Katana.
Предмет дослідження: Алгоритм податливості, що адаптується.
Основні практичні та наукові результати, їх значення:
- Отримано установку, яка має податливість для її використання в різних алгоритмах та подальшого вивчення:
- Отримана система завдання положень та дій робота без програмування.
- Також за допомогою системи можна оцінювати зовнішні навантаження і розподіляти їх між зчленуваннями робота.
3. Аналітичний огляд
Податливість роботів використовують для багатьох завдань, розглядаючи, як правило, як пасивну податливість і пружність [1], так і активну [2].
Під пасивною податливістю розуміють конструктивну податливість, створену або завдяки використанню гнучких матеріалів в конструкції робота, або системою пружин, або іншим механічним способом (наприклад, редуктори HarmonicDrive) [3].
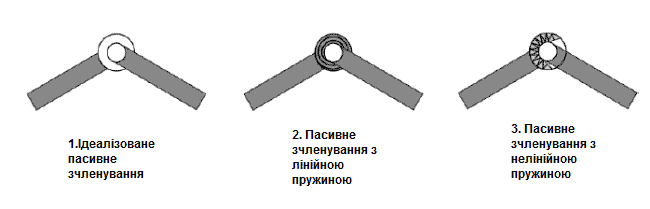
Рисунок 1 – Види пасивних зчленувань
Механізми, що забезпечують пасивну податливість, активно застосовуються в робототехнічних системах [4], але через те, що вони значно ускладнюють систему і є додатковим обладнанням, їх застосування веде до значного подорожчання та збільшення складності обслуговування. Також, як правило, такі маніпулятори стають спеціалізованими під певну задачу, оскільки їх жорсткість і податливість строго обмежені, та їх регулювання не завжди можливо. Активна податливість задається виключно за допомогою корекції керуючого сигналу на приводах робота. Головною трудністю в таких системах є достовірне визначення параметрів об'єкта, характеру зовнішнього впливу й необхідність високої швидкодії системи керування для своєчасної корекції сигналу завдання для приводів. Розрізняють системи з додатковими датчиками залежно від завдання, яке обчисляється за допомогою алгоритму податливості (акселерометри при гасінні коливань або датчики тиску для контролю зусилля при роботі маніпулятора з крихкими об'єктами), та бездатчикового системи з непрямим визначенням параметрів. В випадку бездатчикової системи, завдання визначення і контролю параметрів ускладнюється.
4. Дослідницька частина
Присвячена підготовці маніпулятора Катана для проведення дослідження механізму, що забезпечує активну податливість з непрямим визначенням параметрів за допомогою зміни коефіцієнтів ПІД регулятора, розробці алгоритму податливості і його дослідженню.
4.1 Робот-маніпулятор Katana

Рисунок 2 – Робот-маніпулятор Katana 200 (Neuronics)
Робот Катана є програмованим [5], але його базові функції не дають можливості реалізувати потрібне завдання. Неможливо як отримати дані від датчиків швидкості та струму, так й змінювати зусилля в залежності від зовнішніх факторів, не пов'язаних з роботою його датчиків та не записаних в базових функціях.
Разом з тим, високі чутливість приводів і точність позиціонування робота Katana дозволяють отримувати дані з високою точністю, достатньою для реалізованого завдання.
Таким чином, першим завданням є створення повністю вільно програмованої системи керування, яка дозволить повністю керувати всіма апаратними можливості робота. Для цих цілей спочатку була обрана платформа Arduino Nano на базі мікроконтролера ATmega 168.
Для керування приводами був використаний керований від Arduino міст Gravitech.
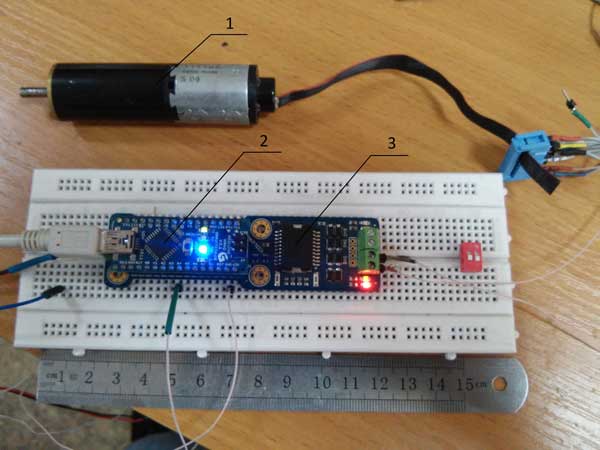
Рисунок 3 – Зовнішній вигляд електроприводу на основі Arduino (джерело живлення не показано)
На рисунку 3: 1 – Приводний пристрій (MotorUnit) складається з редуктора, мікромашини постійного струму з постійними магнітами та енкодера;
2 – Arduino Nano; 3 – Монокристальний керований міст Gravitech.
З його допомогою можливо керувати мікромашинами постійного струму з постійними магнітами, використовуваними в роботі Katana, з використанням ШІМ, а так само одержувати дані про величину струму якоря.
Так як регулювання контурів передбачалося спочатку задати за законом ПІД регулювання, сформувавши три контурну СПР по положенню, а на її основі створити алгоритм, що забезпечує податливість, що адаптується, гостро постала проблема точності даних зворотних зв'язків та розрахунку коефіцієнтів дискретного ПІД регулятору. При реалізації СПР на Arduino виникла проблема необхідності проведення великої кількості розрахунків, що залежать від часу, таких як підрахунок імпульсів енкодеру, формування ШІМ, формування діаграм роботи приводу залежно від величини переміщення в контурі положення. Таким чином, з'явилася необхідність у використанні ще одного контролеру. На додаток до першого, була використана платформа Arduino MEGA.
За допомогою зв’язку по I2C шині, розраховані завдання на швидкість передавалися на керуючу систему - Arduino Nano. Це ще ускладнило розрахунок коефіцієнтів ПІД регулятору та точного визначення швидкості, так як час виконання програми й передачі за I2C шиною впливають на їх величину.

Рисунок 4 – Формула дискретного ПІД регулятора
Рисунок 5 – Формула розрахунку постійних часу з урахуванням дискретності
Вирішити проблему можливо було б поділом функції зворотного зв'язку за швидкістю та за положенням на різні контролери, але це вимагало б використання ще одного мікроконтролеру. Надалі, для компактності установки й спрощення роботи з контролерами більш простим рішенням було б використовувати не платформу Arduino, а безпосередньо мікроконтролери ATmega. Так як використання таймерів вже вимагає роботи з регістрами ATmega, що виходять за програмні функції, що забезпечуються Arduino на мові C++. Що дозволило б організувати таку їх роботу, яка не заважала б формуванню ШІМ. Також недоліком обраної платформи виявилася недостатня точність визначення струму якоря.
Для спрощення роботи з системою керування робота було вирішено замінити контролер на базі платформи Arduino, спеціалізованим контролером EPOS 24/1 фірми MaxonMotors.
Цей контролер спеціально розроблений для керування мікромашинами постійного струму в робототехнічних системах та містить високоточні контури регулювання з автоматичним підрахунком всіх постійних часу. Він не містить спеціалізованого програмного пакету для розробки програм, але розробниками передбачена DLL бібліотека для програмування контролера мовою С++, що дозволяє вільно його програмувати.
Таким чином, вибір був зупинений на контролері EPOS.
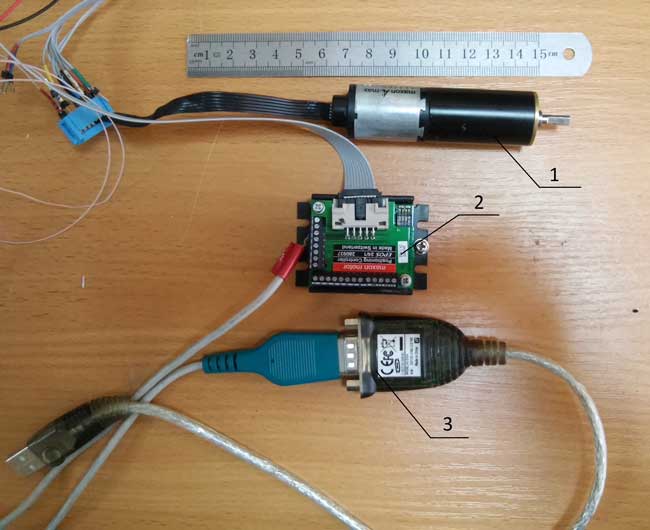
Рисунок 6 – Зовнішній вигляд електроприводу на основі EPOS (джерело живлення не показаний)
На рисунку 6: 1 – Приводний пристрій (MotorUnit) складається з редуктора, мікромашини постійного струму з постійними магнітами та енкодера;
2 – Контролер EPOS; 3 – Перетворювач (RS-232/USB-COM).
4.2 Система керування роботом-маніпулятором для одного ступеня свободи
Контролер EPOS був підключений безпосередньо до двигуна, що приводить у рух один з вузлів маніпулятора, сам контролер підключається до комп'ютеру за протоколом RS232.
Система керування електроприводом робота-маніпулятора представляє з себе класичну трьохконтурну СПР за положенням.
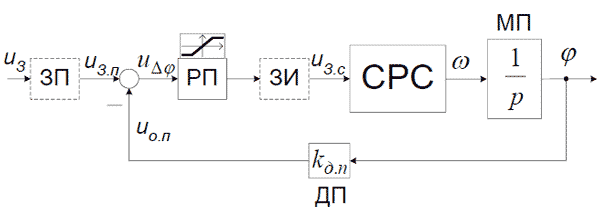
Рисунок 7 – Узагальнена схема системи регулювання положення
Для правильного налаштування контуру положення використовується генератор траєкторій в якості задавача положення та різні методи корекції. В цілому вони або допускають незначне перерегулювання, яке допустиме для робота-маніпулятору, або використовують посадкову швидкість. Величина посадкової швидкості й ширина області дотягування задається налаштувальником. Так як будь-яка ступінь свободи роботу має інерцію, що змінюється в залежності від положення маніпулятору, також залежну від об'єкта, який переміщується маніпулятором, побудувати одну криву для всіх переміщень вкрай важко. Тому й використовуються принципи, що допускають перерегулювання або дотягування. При необхідності, можна задати криву самостійно, безпосередньо запрограмувавши роботу генератора траєкторій [6].
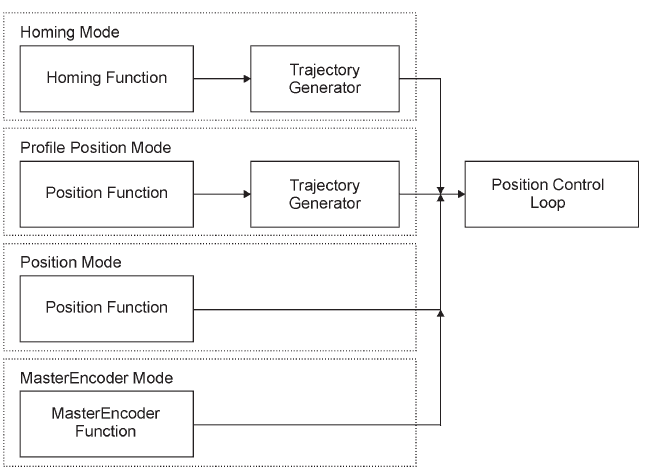
Рисунок 8 – Структура задавача положення в контролері EPOS
4.3 Алгоритм податливості
Алгоритм податливості є зовнішнім контуром для СПР за положенням і на даному етапі роботи представляє одну систему, що дає завдання на положення. Надалі її потрібно скомбінувати із зовнішнім завданням на положення, для забезпечення механізму податливості в динамічних режимах, який не розглядається в даній роботі.
Алгоритм податливості має собою контур з П-регулятором описуваний наступним рівнянням:
Де: θi – Завдання на положення на попередньому кроці
θi+1 – завдання на положення на поточному кроці
Δθ – зміна положення, викликана обурюючим впливом
K – коефіцієнт посилення П-регулятору
Таким чином при К > 0 відбувається посилення обурення та "втікання" маніпулятору, яке дозволяє полегшити керування ним вручну. При K < 0 маніпулятор пручається обуренню і прагне повернутися до початкового положення.
Режим K < 0 потрібен тільки у випадку зниження динамічного навантаження та корекції жорсткості контуру регулювання положення.
Режим K > 0 і є режимом податливості. Так як через втікання маніпулятора від обурюючого впливу, фактична величина цього впливу зменшується, то втікання припиняється. У результаті досягається рівноважний режим у вигляді коротких циклів обурення-втікання, що дозволяють зменшити силу, необхідну для руху маніпулятора. Єдиним недоліком даного алгоритму є необхідність подолання статичного тертя вузлів маніпулятора. Для невеликих маніпуляторів даний недолік неістотний, так як не потрібно прикладати значне зусилля для її подолання. У разі якщо у маніпулятора значна величина статичного тертя, то даний недолік проявляється значніше і може привести до неможливості взаємодії маніпулятора і людини.
Одним з важливих чинників є відпрацювання завдання, що подається алгоритмом податливості. Воно залежить від коефіцієнтів регуляторів системи підпорядкованого регулювання.
4.4 Алгоритм адаптивної податливості
Адаптивна податливість включає в себе корекцію коефіцієнта податливості К з рівняння податливості, а також перенастроювання коефіцієнтів системи керування положенням маніпулятора.
Розгляд даного алгоритму вимагає додаткових експериментальних даних про відпрацювання системи при різних коефіцієнтах. Відомо, що при малих значеннях 1 - 3 пропорційного коефіцієнта Кр вплив системи управління незначно, а при коефіцієнті кр = 16 система стає занадто жорсткою. Надалі потрібне уточнення налаштувань регуляторів у зв'язку з механізмом податливості.
Одним з варіантів реалізації відклику на вплив , який нижче моменту опору ланок маніпулятору є представлений на анімованій картині. У статичному режимі на обмотку якоря двигунів подається низкочастотна синусоїдальна напруга з періодом, набагато меншим, ніж електромагнітна постійна двигуна, для виключення впливу динамічних режимів на роботу алгоритму. Амплітуда напруги, що подається на задану величину менше, ніж напруга, яке дозволить привести до зрушення маніпулятору. Як тільки до маніпулятора додається зовнішнє зусилля, воно складається з синусоїдальним сигналом і призводить до зрушення маніпулятора та отриманню за допомогою датчика положення і датчика струму інформації про направлення й характер впливу.
При досягненні кінцевого положення, відбувається перерахунок величини моменту зрушення з урахуванням зміненого становища мас.
Недоліком такого режиму є постійна робота приводів маніпулятора, що неприпустимо для мобільних роботів з живленням від батареї або потужних приводів з великою величиною моменту зрушення. Тому цей режим рекомендується включати лише тимчасово для підвищення чутливості маніпулятора на впливи, якщо це необхідно.
Частішим рішенням є обладнання корпусу маніпулятору додатковими датчиками тиску, які дозволяють безпосередньо отримувати всю необхідну інформацію про механічні впливи, яким піддається маніпулятор.
Рисунок 9 – Модифікація алгоритму податливості для впливів нижче моменту опору зчленувань робота
(анімація: 12 кадрів, 7 циклів повторення, 192 кілобайт)
Висновок
У процесі роботи була створена повністю програмована система для керування роботом-маніпулятором на основі контролера EPOS. Також був розглянутий і вивчений алгоритм адаптивної податливості для робота-маніпулятора.
Найбільш суттєві висновки та рекомендації полягають у наступному:
- При синтезі дискретної системи керування для робота-маніпулятора з забезпеченням високої точності відпрацювання потрібна увага до постійних часу всіх датчиків та регуляторів, включаючи час ітерації програмного коду. Сталих часу всіх датчиків і регуляторів, включаючи час ітерації програмного коду.
- Алгоритм податливості вимагає удосконалення для маніпуляторів з великими величинами статичного тертя.
- Для забезпечення податливості потрібні чутливі датчики і швидкодіюча система керування.
Примітка. При написанні даного реферату дипломна робота знаходиться на стадії виконання, тому наведений реферат містить наявну на момент складання іспиту з дисципліни "Інтернет-технології" інформацію. Кінцевий термін виконання магістерської роботи і дата захисту диплома - січень 2015 року.
Список джерел:
- I.Thorson, A Variable Stiffness Actuator for Use in Passive-Dynamic Robots [Электронный ресурс]– Режим доступа: http://www.roboloco.net/research/thorson-robomec-2007-poster.pdf
- A. Pashkevich, Modeling and Parameter Identification of Harmonic Drive Systems [Электронный ресурс] - Режим доступа:http://hal.archives-ouvertes.fr/docs/00/58/31/67/PDF/Enhanced_stiffness_modeling_of_manipulators_with_passive_joints_v57.pdf
- H.D. Taghirad, Modeling and Parameter Identification of Harmonic Drive Systems [Электронный ресурс] - Режим доступа:http://saba.kntu.ac.ir/eecd/aras/papers/J5-JDSMC98-model.pdf
- T.A. Dwarakanath, In-Parallel Passive Compliant Coupler for Robot Force Control [Электронныйресурс]- Режим доступа: http://cimar.mae.ufl.edu/CIMAR/pages/pubs/pccfc.pdf
- В.В. Рябченко, Программно-аппаратный комплекс управления роботами-манипуляторами фирмы NEURONICS AG [Электронный ресурс]- Режим доступа: http://www.uran.donetsk.ua/~masters/2012/etf/snegina/library/article%2022.htm
- Спецификация программного обеспечения для контролеров EPOS [Электронный ресурс]- Режим доступа: http://www.maxonmotor.com/medias/sys_master/8803613540382/EPOS-Firmware-Specification-En.pdf
- E. Amrollah, P. Henaff, On the role of sensory feedbacks in Rowat–Selverston CPG to improve robot legged locomotion // Frontiers in Neurosciences. Neurorobotics 4, 113, 2010. – 9 p. [Электронный ресурс]. – Режим доступа: http://www.ncbi.nlm.nih.gov...
- A. A. Melnyk, P. Henaff, S. Razakarivony, V. Ph. Borisenko, P. Gaussier, Adaptive Behavior Of An Electromechanical Arm Robot In a Case
Of Physical Interaction With a Human Being [Электронный ресурс]. – Режим доступа: http://ieeexplore.ieee.org/xpl/...