
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Основные вопросы, которые должны быть разрешены в данной работе
- 3. Аналитический обзор
- 4. Исследовательская часть
- 4.1 Робот-манипулятор Katana
- 4.2 Система управления роботом-манипулятором для одной степени свободы
- 4.3 Алгоритм податливости
- 4.4 Алгоритм адаптивной податливости
- Вывод
- Список источников
Введение
С увеличением сложности современных систем возникает крайне важная задача упрощения обращения с ними, а так же подавления случайных факторов (возмущений) негативно влияющих на их работу. Так как биологические системы крайне сложны, подобные вопросы стоят в них даже более остро. Таким образом, способы решения инженерных задач, используемые природой, могут быть перенесены и на искусственные системы, выполняющие сходные функции.
В роботах со сложным поведением нельзя предугадать спектр механических воздействий, которым он будет подвергнут. Таким образом, необходим механизм, способный подавлять нежелательные воздействия, или способный регистрировать и отвечать на них. В природе, для этих целей используется эластичность и податливость.
Так как механические части роботов очень жесткие и плохо переносят избыточные нагрузки, нарушая целостность передаточных механизмов. При случайных механических воздействиях на робота, требуется механизм, который бы снижал и демпфировал избыточную нагрузку.
Используя систему управления приводами робота можно добиться эффекта податливости для каждой из его подвижных частей, в том числе, и ниже собственного момента сопротивления передачи для отклика на очень слабые воздействия.
Кроме того, данное свойство применимо для решения многих задач.
1. Актуальность темы
Механизм податливости помогает в решении сразу нескольких задач. Одной из них является взаимодействие с роботом без какого-либо дополнительного интерфейса. Решение данной задачи будет основным для данной работы, так как не требует дополнительных механизмов.
Податливость позволяет как расширить количество доступных взаимодействия робота с человеком, так и избежать возможного травматизма, если приводы манипуляторов достаточно мощные.
Также его же можно использовать для программирования робота. Записывать информацию о движения во время того, как человек самостоятельно передвигает манипулятор не прилагая для этого усилий. Данный механизм крайне актуален, так как одной из причин сложности внедрения роботов является сложности с его программированием и обслуживанием. С появление возможности запрограммировать движения робота, просто перемещая рабочий орган или дублирующее устройство в нужное положение вручную, сложности с программированием исключаются.
Ещё одним применением является защита от избыточных нагрузок. Используя изменяемые в зависимости от силы и характера внешней нагрузки упорные или экскаваторные характеристики, можно распределить нагрузку между всеми приводами робота или остановить его не превысив допустимое значение.
Также важным свойством податливости и упругости, как механизма, который проявляется при соревновании между заданием, которое выполняет робот и механизмом, обуславливающим его податливость, является подавление нежелательных колебаний и приспосабливание к особенностям поверхностей с которыми работает робот. Для роботов-шагателей, это позволяет избежать расшатывания, связанного с движением и приспособиться к неровностям поверхности по которой шагает робот.
Для роботов-манипуляторов - подавить колебания груза, если они возникают, или другие упругие колебания, связанные с резким изменением нагрузки. Или плотно обхватить предмет неправильной формы или хрупкий предмет, не превышая давления, которое привело бы к его повреждению.
2. Цель, задачи исследования и предполагаемые результаты
На основе имеющегося робота-манипулятора Katana создать систему адаптирующейся податливости для одной степени свободы. Получить графики, которые отражают работу системы. Изучить влияние изменения коэффициентов ПИД регулятора на работу системы. Получить зависимости, показывающие влияние коэффициентов на работу алгоритма и отладить работу системы, учитывая данный фактор.
Для достижения данной цели в работе надо решить следующие задачи:
- Составить свободно программируемую систему управления с достаточным быстродействием, приспособленную для управления приводом робота–манипулятора.
- Составить программу, выполняющую ПИД-регулирование с контурами тока, скорости и положения. Исследовать работу системы, найти оптимальные коэффициенты.
- Составить и запрограммировать алгоритм, обеспечивающий податливость.
- Запрограммировать нейронную сеть, которая позволила бы адаптировать коэффициенты ПИД регулятора к внешним нагрузкам в зависимости от заданной податливости.
- Получить результаты работы системы и проанализировать влияние коэффициентов ПИД регулятора на механизм податливости.
Объект исследования: Робот-манипуляторKatana.
Предмет исследования: Алгоритм адаптируемой податливости.
Основные практические и научные результаты, их значение:
- Получена установка обладающая податливостью для её использования в различных алгоритмах и дальнейшего изучения.
- Получена система задания положений и действий робота без программирования.
- Также с помощью системы можно оценивать внешние нагрузки и распределять их между сочленениями робота.
3. Аналитический обзор
Податливость роботов используют для многих задач, рассматривая, как правило, как пассивную податливость и упругость [1], так и активную [2].
Под пассивной податливостью понимают конструктивную податливость, созданную либоблагодаря использованию гибких материалов в конструкции робота, либо системой пружин, либо другим механическим способом (например, редукторы HarmonicDrive) [3].
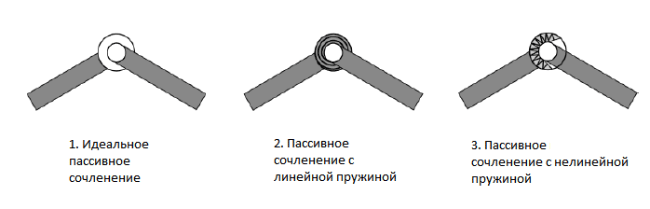
Рисунок 1 – Виды пассивных сочленений
Механизмы, обеспечивающие пассивную податливость, активно применяются в робототехнических системах [4], но из-за того, что они значительно её усложняют и являются дополнительным оборудованием, их применение ведёт к значительному удорожанию и увеличению сложности обслуживания. Также, как правило, такие манипуляторы становятся специализированными под конкретную задачу, так как их жесткость и податливость строго ограничены, и их регулирование не всегда возможно. Активная податливость задаётся исключительно с помощью коррекции управляющего сигнала на приводах робота. Основной трудностью в таких системах является достоверное определение параметров объекта, характера внешнего воздействия и необходимость высокого быстродействия системы управления для своевременной коррекции сигнала задания для приводов. Различают системы с дополнительными датчиками в зависимости от задачи, которая решается с помощью алгоритма податливости (акселерометры при гашении колебаний или датчики давления для контроля усилия при работе манипулятора с хрупкими объектами), и бездатчиковые системы с косвенным определением параметров. В случае бездатчиковой системы, задача определения и контроля параметров усложняется.
4. Исследовательская часть
Посвящена подготовке манипулятора Katana для проведения исследования механизма, обеспечивающего активную податливость с косвенным определением параметров в зависимости от изменения коэффициентов ПИД регулятора, разработке алгоритма податливости и его исследованию.
4.1 Робот-манипулятор Katana

Рисунок 2 – Робот-манипулятор Katana 200 (Neuronics)
Робот Katana является программируемым [5], но его базовые функции не дают возможности реализовать требуемую задачу. Невозможно, как получить данные от датчиков скорости и тока, так и изменять усилие в зависимости от внешних факторов, не связанных с работой его датчиков и не записанных в базовых функциях.
Вместе с тем, высокая чувствительность приводов и точность позиционирования робота Katana позволяют получать данные с высокой точностью, достаточной для реализуемого задания.
Таким образом, первой задачей является создание полностью свободно программируемой системы управления, которая позволит полностью управлять всеми аппаратными возможностями робота. Для этих целей первоначально была выбрана платформа Arduino Nano на базе микроконтроллера ATmega 168.
Для управления приводами был использован управляемый от Arduino мост Gravitech.
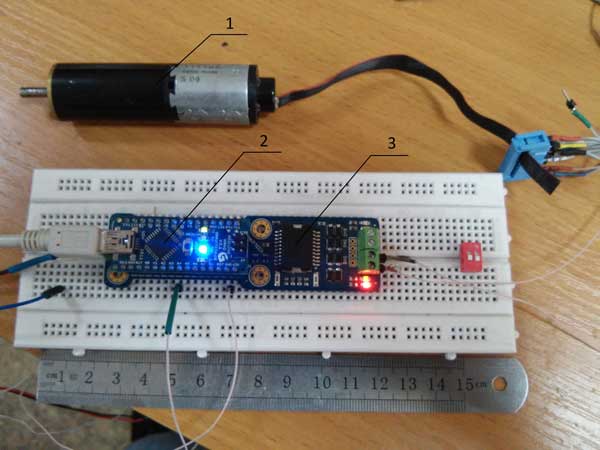
Рисунок 3 – Внешний вид электропривода на основе Arduino (источник питания не показан)
На рисунке 3: 1 – Приводное устройство(MotorUnit)состоящее из редуктора, микромашины постоянного тока с постоянными магнитами и энкодера;
2 – ArduinoNano; 3 – Монокристальный управляемый мост Gravitech
С его помощью возможно управлять микромашинами постоянного тока с постоянными магнитами, используемыми в роботе Katana, с использованием ШИМ, а так же получать данные о величине тока якоря.
Так как регулирование контуров предполагалось изначально задать по закону ПИД регулирования, сформировав трёхконтурную СПР по положению, а на её основе создавать алгоритм, обеспечивающий адаптирующуюся податливость, остро встала проблема точности данных обратных связей и расчёта коэффициентов дискретного ПИД регулятора. При реализации СПР на Arduino возникла проблема необходимости проведения большого количества расчётов, зависящих от времени, таких как подсчёт импульсов энкодера, формирование ШИМ, формирование диаграмм работы привода в зависимости от величины перемещения в контуре положения. Таким образом, появилась необходимость в использовании ещё одного контроллера. В дополнение к первому, была использована платформа Arduino MEGA.
С помощью связи по I2C шине, рассчитанные задания на скорость передавались на управляющую систему – Arduino Nano. Это ещё усложнило расчёт коэффициентов ПИД регулирования и точного определения скорости, так как время выполнения программы и передачи по I2C шине оказывают влияние на их величину.

Рисунок 4 – Формула дискретного ПИД регулятора
Рисунок 5 – Формула учёта дискретности в постоянных времени
Решить проблему возможно было бы разделением функции обратной связи по скорости и по положению на разные контроллеры, но это потребовало бы использования ещё одного микроконтроллера. В дальнейшем, для компактности установки и упрощения работы с контроллерами более простым решением было бы использовать не платформу Arduino, а непосредственно микроконтроллеры ATmega. Так как использование таймеров уже требует работы с регистрами ATmega, выходящие за программные функции, обеспечиваемые Arduino на языке C++. Что позволило бы организовать такую их работу, которая не мешала бы формированию ШИМ. Также недостатком выбранной платформы оказалась недостаточная точность определения тока якоря.
Для упрощения работы с системой управления робота было решено заменить контроллер на базе платформы Arduino, специализированным контроллером EPOS 24/1 фирмы Maxon Motors.
Данный контроллер специально разработан для управления микромашинами постоянного тока в робототехнических системах и содержит высокоточные контуры регулирования с автоматическим подсчётом всех постоянных времени. Он не содержит специализированного программного пакета для разработки программ, но разработчиками предусмотрена DLL библиотека для программирования контроллера на языке С++, что позволяет свободно его программировать.
Таким образом, выбор был остановлен на контроллере EPOS.
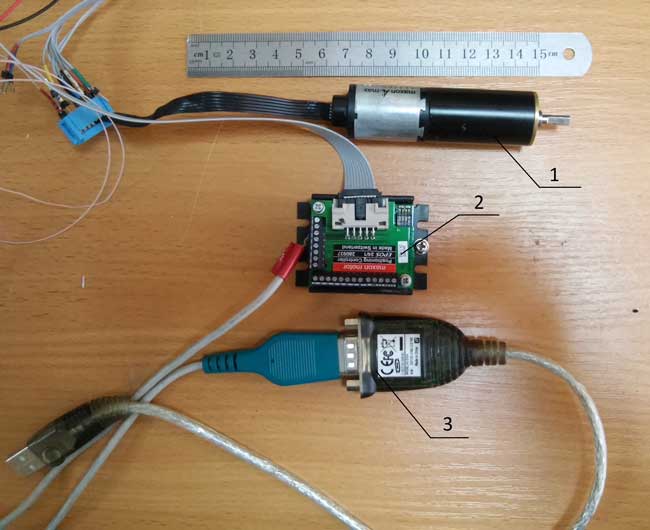
Рисунок 6 – Внешний вид электропривода на основе EPOS (источник питания не показан)
На рисунке: 6 – Приводное устройство(MotorUnit)состоящее из редуктора, микромашины постоянного тока с постоянными магнитами и энкодера;
2 – Контроллер EPOS; 3 – Преобразователь (RS-232/USB-COM)
4.2 Система управления роботом-манипулятором для одной степени свободы
Контроллер EPOS был подключен непосредственно к двигателю, приводящему в движение один из узлов манипулятора, сам контроллер подключается к компьютеру по протоколу RS232.
Cистема управления электроприводом робота-манипулятора представляет из себя классическую трёхконтурную СПР по положению.
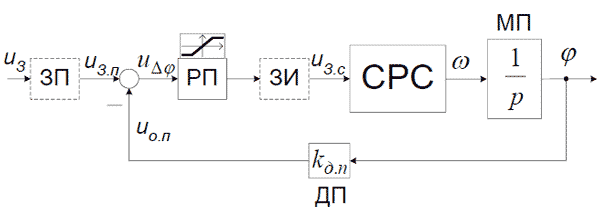
Рисунок 7 – Обобщённая схема системы регулирования положения
Для правильной настройки контура положения используется генератор траекторий в качестве задатчика положения и различные методы коррекции. В целом, они либо допускают небольшое перерегулирование, которое допустимо для робота-манипулятора, либо используют посадочную скорость. Величина посадочной скорости и ширина области дотягивания задаётся настройщиком. Так как любая степень свободы робота имеет изменяющуюся в зависимости от положения манипулятора инерцию, зависящую также от объекта, который перемещается манипулятором, построить одну кривую для всех перемещений крайне затруднительно. Поэтому и используются принципы, допускающие перерегулирование или дотягивание. При необходимости, можно задать кривую самостоятельно, напрямую запрограммировав работу генератора траекторий [6].
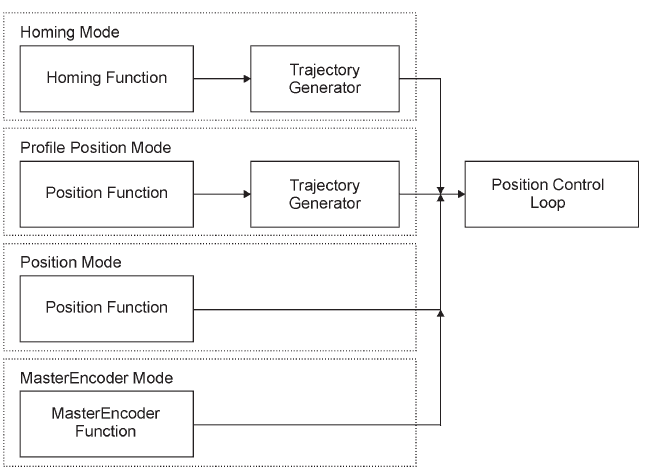
Рисунок 8 – Структура задатчика положения в контроллере EPOS
4.3 Алгоритм податливости
Алгоритм податливости является внешним контуром для СПР по положению и на данном этапе работы представляет единственную систему, дающую задание на положение. В дальнейшем её требуется скомбинировать с заданием на положение от оператора, для обеспечения механизма податливости в динамических режимах, который не рассматривается в данной работе.
Алгоритм податливости представляет собой контур с П-регулятором описываемый следующим уравнением:
Где: θi – задание на положение на предыдущем шаге
θi+1 –задание на положение на текущем шаге
Δθ – изменение положения, вызванное возмущающим воздействием
K – коэффициент усиления П-регулятора
Таким образом при К >0 происходит усиление возмущения и «убегание» манипулятора, которое позволяет облегчить управление им вручную. При K< 0 манипулятор сопротивляется возмущению и стремиться вернуться в исходное положение.
Режим K < 0 требуется только в случае снижения динамической нагрузки и коррекции жесткости контура регулирования положения.
Режим K > 0 и является режимом податливости. Так как из-за убегания манипулятора от возмущающего воздействия, фактическая величина этого воздействия уменьшается, то убегание прекращается. В результате достигается равновесный режим в виде кратких циклов возмущения-убегания, позволяющих уменьшить внешнюю силу, необходимую для движения манипулятора. Единственным недостатком данного алгоритма является необходимость преодоления статического трения узлов манипулятора. Для небольших манипуляторов данный недостаток несущественен, так как не нужно прикладывать значительное усилие для его преодоления. В случае, если у манипулятора значительная величина статического трения, то данный недостаток проявляется значительнее и может привести к невозможности взаимодействия манипулятора и человека.
Одним из важных факторов является отработка задания, подаваемого алгоритмом податливости. Она зависит от коэффициентов регуляторов системы подчинённого регулирования.
4.4 Алгоритм адаптивной податливости
Адаптивная податливость включает в себя коррекцию коэффициента податливости К из уравнения регулятора податливости, а также перенастройку коэффициентов системы управления положением манипулятора.
Рассмотрение данного алгоритма требует дополнительных экспериментальных данных об отработке системы при различных коэффициентах. Известно, что при малых значениях 1 – 3 пропорционального коэффициента Кр влияние системы управления незначительно, а при коэффициенте кр=16 система становится слишком жесткой. В дальнейшем требуется уточнение настроек регуляторов в связи с механизмом податливости.
Одним из вариантов реализации отклика на воздействие ниже момента сопротивления звеньев манипулятора является представленный на анимированной картине. В статическом режиме на обмотку якоря двигателей подаётся низкочастотное синусоидальное напряжение с периодом, намного меньшим, чем электромагнитная постоянная двигателя, для исключения влияния динамических режимов на работу алгоритма. Амплитуда подаваемого напряжения на заданную величину меньше, чем напряжение, которое позволит привести к страгиванию манипулятора. Как только к манипулятору прилагается внешнее усилие, оно складывается с синусоидальным сигналом и приводит к страгиванию манипулятора и получению с помощью датчика положения и датчика тока информации о направлении и характере воздействия.
При достижении конечного положения, происходит перерасчёт величины момента страгивания с учётом изменившегося положения масс.
Недостатком такого режима является постоянная работа приводов манипулятора, что недопустимо для мобильных роботов с питанием от батареи или мощных приводов с большой величиной момента страгивания. Поэтому даннный режим рекомендуется включать лишь временно для повышения чувствительности манипулятора на возмущающие воздействия, если это неоходимо.
Более частым решением является оборудование корпуса манипулятора дополнительными датчиками давления, которые позволяют непосредственно получать всю необходимую информацию о механических воздейсвтиях, которым подвергается манипулятор.
Рисунок 9 – Модификация алгоритма податливости для воздействий ниже момента сопротивления сочленений робота
(анимация: 12 кадров, 7 циклов повторения, 192 килобайта)
Выводы
В процессе работы была создана полностью программируемая система для управления роботом-манипулятором на основе контроллера EPOS. А так же был рассмотрен и изучен алгоритм адаптивной податливости для робота-манипулятора.
Наиболее существенные выводы и рекомендации заключаются в следующем:
- При синтезе дискретной системы управления для робота-манипулятора с обеспечениемвысокой точности отработки требуется внимание к постоянным времени всех датчиков и регуляторов, включая время итерации программного кода.
- Алгоритм податливости требует усовершенствования для манипуляторов с большими величинами статического трения.
- Для обеспечения податливости требуются чувствительные датчики и быстродействующая система управления.
Примечание. При написании данного реферата дипломная работа находится на стадии выполнения, поэтому приведенный реферат содержит имеющиеся на момент сдачи экзамена по дисциплине «Интернет-технологии» информацию. Конечный срок выполнения магистерской работы и дата защиты диплома – январь 2015 года.
Список источников
- I.Thorson, A Variable Stiffness Actuator for Use in Passive-Dynamic Robots [Электронный ресурс]– Режим доступа: http://www.roboloco.net/research/thorson-robomec-2007-poster.pdf
- A. Pashkevich, Modeling and Parameter Identification of Harmonic Drive Systems [Электронный ресурс] - Режим доступа:http://hal.archives-ouvertes.fr/docs/00/58/31/67/PDF/Enhanced_stiffness_modeling_of_manipulators_with_passive_joints_v57.pdf
- H.D. Taghirad, Modeling and Parameter Identification of Harmonic Drive Systems [Электронный ресурс] - Режим доступа:http://saba.kntu.ac.ir/eecd/aras/papers/J5-JDSMC98-model.pdf
- T.A. Dwarakanath, In-Parallel Passive Compliant Coupler for Robot Force Control [Электронныйресурс]- Режим доступа: http://cimar.mae.ufl.edu/CIMAR/pages/pubs/pccfc.pdf
- В.В. Рябченко, Программно-аппаратный комплекс управления роботами-манипуляторами фирмы NEURONICS AG [Электронный ресурс]- Режим доступа: http://www.uran.donetsk.ua/~masters/2012/etf/snegina/library/article%2022.htm
- Спецификация программного обеспечения для контролеров EPOS [Электронный ресурс]- Режим доступа: http://www.maxonmotor.com/medias/sys_master/8803613540382/EPOS-Firmware-Specification-En.pdf
- E. Amrollah, P. Henaff, On the role of sensory feedbacks in Rowat–Selverston CPG to improve robot legged locomotion // Frontiers in Neurosciences. Neurorobotics 4, 113, 2010. – 9 p. [Электронный ресурс]. – Режим доступа: http://www.ncbi.nlm.nih.gov...
- A. A. Melnyk, P. Henaff, S. Razakarivony, V. Ph. Borisenko, P. Gaussier, Adaptive Behavior Of An Electromechanical Arm Robot In a Case
Of Physical Interaction With a Human Being [Электронный ресурс]. – Режим доступа: http://ieeexplore.ieee.org/xpl/...