
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Состояние вопроса, цель и задачи исследований
- 1.1. Актуальность темы
- 1.2. Состояние вопроса по изучению пусковых режимов скребковых конвейеров
- 1.3. Цель и задачи исследований
- 2. Разработка математической модели трёхприводного скребкового конвейера на базе двухскоростных асинхронных двигателей
- 3. Алгоритм запуска конвейера на первую скорость с точки зрения обеспечения равномерной нагрузки на привод
- Выводы
- Список литературы
- 1.3. Цель и задачи исследований
Введение
Важнейшую роль в обеспечении эффективной работы угольного предприятия и всей промышленности в целом играет транспорт угля. Одним из распространенных видов транспортных машин на угольных шахтах является скребковый конвейер.
Скребковые конвейеры представляют собой устройство для транспортировки непрерывного действия. В них перемещение насыпанных материалов происходит по неподвижно закрепленному желобу с помощью скребков, крепящихся к одной или нескольким тяговым цепям.
Скребковые конвейера отличаются простотой конструкции, безопасностью в использовании, возможностью передачи разнообразных грузов по трассам разной сложности, простотой автоматизированной как загрузки, так и разгрузки на многих точках.
Особенностью современных скребковых забойных конвейеров является использование для их привода двухскоростных асинхронных электродвигателей[1].
Выполненный анализ и мировой опыт создания и использования скребковых конвейеров показывают, что одним из перспективных средств осуществления пуска привода на пониженной скорости,
а также средством реализации пониженной скорости привода в продолжительном режиме являются двухскоростные асинхронные двигатели, оснащенные двумя статорными обмотками с разным числом пар полюсов.
Установка таких двигателей позволяет исключить из состава привода конвейера гидромуфту, которая имеет ряд эксплуатационных недостатков:
–значительная потеря времени на техническое обслуживание;
–утечка рабочей жидкости влияет на распределение нагрузки между приводами;
–низкая надежность.
Опыт эксплуатации двухскоростных забойных скребковых конвейеров подтвердил их высокую эффективность и, в то же время, выявил проблемы, связанные с затрудненным запуском загруженных конвейеров и недостаточной надежностью редукторов и электродвигателей. В значительной степени эти проблемы связанны с недостаточной изученностью переходных процессов пуска. Исследование режимов пуска имеет важное практическое значение, так как именно в этих режимах формируются высокие динамические усилия, определяющие исходные данные для прочностных расчетов и влияющие на долговечность цепи и элементов привода[2].
Скребковые конвейеры с двухскоростным двигателем выполняются с двумя или тремя приводами. Данная работа посвящена исследованию пусковых режимов трёхоприводних скребковых забойных конвейеров.
1. Состояние вопроса, цель и задачи исследований
1.1 Актуальность темы
При пуске загруженного конвейера иногда возникает критическая ситуация, так называемый «тяжелый пуск конвейера», когда динамические нагрузки на компоненты привода значительно превышают статические, что проявляется в быстром перегреве асинхронных двигателей. Для пуска перегруженного конвейера требуется особо высокий начальный пусковой момент, то есть большой ток. Это вызывает быстрое падение напряжения в питающей сети и мгновенное снижение вращающего момента[3].
Для запуска конвейера в таких условиях необходимо обеспечить согласованную работу всех приводов. Одним из путей достижения этой цели является выбор рационального алгоритма запуска приводов конвейера на первую (низкую) и вторую (высокую) скорости, то есть определенной последовательности включения электродвигателей головного и хвостового приводов.
Однако на практике при запуске трёхприводних двухскоростных конвейеров наблюдается несогласованная работа приводов. Например, на рис.1 приведена осциллограмма мощности приводных двигателей трехприводного конвейера КСД27 при пуске в шахтных условиях[4]. Как видно из рисунка 1, оба главных электродвигателя практически не нагружены, причем в отдельные периоды времени двигатели работают в генераторном режиме.
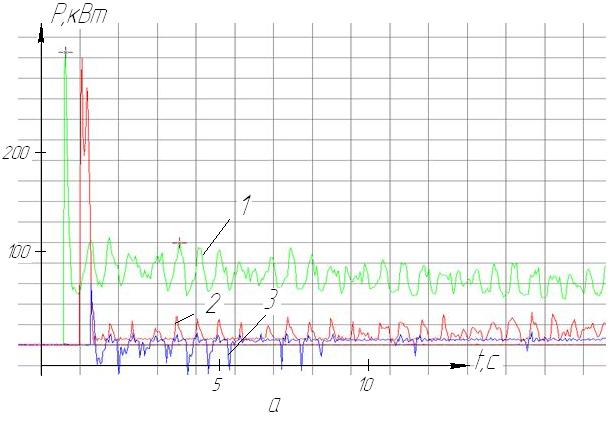
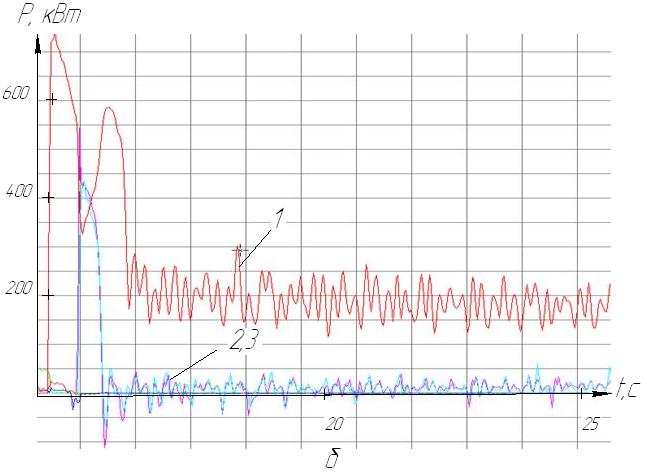
Рисунок 1. – Осциллограммы мощности Р электродвигателей трехприводного конвейера при пуске на низкую скорость (а) и при переходе на высокую скорость (б) (1- хвостовой привод, 2, 3 – головные приводы, шахтный эксперимент)[4]
1.2. Состояние вопроса по изучению пусковых режимов скребковых конвейеров
Исследованием и созданием скребковых конвейеров занимаются ряд организаций, исследовательских институтов, заводов в их числе: ДГТУ, ДонНТУ, Московский государственный горный университет, Харьковский машиностроительный завод «Свет шахтера», ОАО "Анжеромаш", институт «Донгипроуглемаш», ОАО «Донецкгормаш», ПО «Донецкуглеремонт», ОАО «Донбассуглеремонт», объединение «Интрансмаш», и др.
Вопросами запуска скребкового конвейера занимались ученые: Варченко Ю.Е., Каширських В.Г., Переверзев С.С., Браславський И.Я., Ещин Е.К, Ковач К.П., Копилов І.П., Ладензон В.А., Масандилов Л.Б., Штокман І.Г, Дьяков В.А., Шклярский, С.А., Шахмейстер Л.Г., Пейсахович Г.Я., и др.
Вопросами запуска забойных скребковых конвейеров с двухскоростными двигателями занимались Аренс К.[5], Брихта П.[6], Корнеев С.В., Бабенко Н.П., Кондрахин В.П., Стадник Н.И., Косарев И.В., Косарев В.В.
Проблемы изучения переходных и установившихся режимов работы забойных скребковых конвейеров посвящено большое количество исследований [1-16]. В этих работах скребковый конвейер рассматривается как сложная нелинейная динамическая система, которая обладает распределенными в пространстве упругими, инерционными, диссипативными и электромагнитными свойствами. На вход этой системы (тяговый орган) действуют в общем случае случайные нагрузки, которые формируются в процессе взаимодействия транспортируемой горной массы с тяговым органом и рештачым ставом.
Главный недостаток скребковых конвейеров заключается в несовершенстве принципа действия, а именно перемещения груза волочением и движение тягового органа скольжением. Вследствие этого возникают большие сопротивления движению, натяжения тягового органа, повышенный расход энергии и износ.
Институтом «Донгипроуглемаш» в настоящее время разработаны скребковые конвейеры нового технического уровня. С 1998г. институт начал создавать типажный ряд скребковых конвейеров КСД. Опытный образец типичного представителя – конвейера КСД 27 изготовлен ОАО «Донецкгормаш», а также разработаны конвейеры для тонких пологих и полого – наклонных пластов КСД 26 и КСД 26В и конвейеры КСД 210, КСД 29 для мощных пластов.
Конвейер КСД27 оборудован унифицированными с КСД 26 и КСД 26В редукторами, при этом есть различия в рамах, рештачном ставе, в мощности приводов и тяговом органе.
В работе Андреева Г.В., Косарева И.В. и др., рассмотрен вопрос, посвященный скребковым конвейерам нового технического уровня. Приведенные особенности расчета и технико-экономических показателей применения этих конвейеров в промышленности [1].
В работе Бабенко М.П.[3] рассмотрены вопросы, посвященные забойному скребковому конвейеру. Понятие «Привод забойного скребкового конвейера» требует глубокого знания характеристик рабочих машин – асинхронного двигателя, редуктора, защитной муфты, цепных приводных звездочек и контура. В забойных конвейерах пуск является определяющим рабочей фазой, на которую влияет множество факторов: загрузка и длина конвейера, коэффициент сопротивления движению цепи в верхней и нижней ветвях, угол падения пласта и направление транспортировки горной массы; усилия предварительного натяжения цепи; разрыв во времени пуска главного и конечного приводов и др.
Динамика привода и тягового органа скребкового конвейера может быть рассчитана по методике [7], основанной на работах Б.А. Скородумова. Однако указанные работы относятся к конвейерам с традиционной структурой привода с односкоростными электродвигателями и гидромуфтой.
Работа Корнеева С.В. «Обоснование эксплуатационных параметров и способов адаптации шахтных скребковых конвейеров нового поколения», посвященная установлению закономерностей формирования нагрузок в силовой системе, разработке методов комплексного исследования и научного обоснования способов и технических средств адаптации забойных скребковых конвейеров для повышения их эффективности путем приведения эксплуатационных параметров конвейера в соответствие реальным условиям эксплуатации [8]. Однако пусковые режимы двухскоростных конвейеров в указанной работе не рассматривались.
В статье Корнеева С.В., Варченко Ю.Е.[9], скребковый конвейер рассматривается как сложная нелинейная динамическая система, которая обладает распределенными в пространстве упругими, инерционными, диссипативными и электромагнитными свойствами. На вход этой системы (тяговый орган) действуют в общем случае случайные нагрузки, которые формируются в процессе взаимодействия горной массы транспортируемой тяговым органом.
В книге Давыдова Б.Л., Скородумова Б.А.«Динамика горных машин» при исследовании пусковых режимов рассматривается одноприводной скребковый конвейер как система с двумя сосредоточенными массами: приведенная по методу Рэлея масса тягового органа и присоединенного к нему груза, и приведенная масса ротора двигателя и элементов редуктора [10].
Таким образом, вопросы обоснования рационального режима запуска двухскоростных скребковых забойных конвейеров недостаточно хорошо изучены и требуют дальнейших исследований.
1.3. Цель и задачи исследований
Цель работы: повышение эффективности эксплуатации двухскоростных трёхприводных забойных скребковых конвейеров за счёт разработки оптимального алгоритма их запуска, обеспечивающего равномерное распределение нагрузки между приводами, минимальные тяговые усилия в цепи и возможность запуска при высоких значениях сил сопротивления.
Для достижения поставленной цели необходимо решить следующие задачи:
- разработать и реализовать в виде программного модуля математическую модель двухскоростного трёхприводного забойного скребкового конвейера типа КСД;
- выполнить идентификацию параметров модели, провести вычислительные эксперименты и путем анализа результатов вычислительных экспериментов установить закономерности влияния на пусковые нагрузки параметров пусковых режимов конвейера;
- решить задачу оптимальной адаптации алгоритма запуска конвейера до заданных условий эксплуатации с учетом длины конвейера, угла транспортировки, производительности с точки зрения обеспечения равномерной нагрузки на головной и хвостовой приводы;
- обосновать оптимальный режим запуска двухскоростных трёхприводних скребковых конвейеров с точки зрения формирования нагрузок тягового органа;
- определить рациональный алгоритм «тяжелого» запуска конвейера при повышенных значениях сил сопротивления движению тяговой цепи.
2. Разработка математической модели трёхприводного скребкового конвейера на базе двухскоростных асинхронных двигателей
Для оптимальной адаптации режима пуска двухскоростных трёхприводных скребковых конвейеров к работе в заданных условиях используется разработанная ДонНТУ математическая модель, которая позволяет исследовать процесс формирования пусковых нагрузок в приводах и тяговом органе [2,4].
Расчётная схема конвейера, приведеная на рис. 2, включает три приводных электродвигателя. Два из них установлены на головном приводе (включаются одновременно) и один на хвостовом приводе. При составлении схемы использовано представление тягового органа с грузом в виде совокупности конечных элементов, обладающих упругими, диссипативными и инерционными свойствами [11].
На схеме приняты следующие обозначения:
Jд – момент инерции роторов 1-го и 2-го электродвигателей;
Mд1, Mд2 – электромагнитные моменты 1-го и 2-го электродвигателей;
Jзв – момент инерции приводной звезды;
Сп – коэффициент жесткости редуктора привода;
mг – масса груза, соответствующая одному конечному элементу;
Fc – сила сопротивления движению массы m участка тяговой цепи и груза (с учетом составляющей веса mgsinα при работе на пласте с углом падения α ).
В качестве обобщенных координат для математического описания системы приняты:
φд1, φд2, φд3 – углы поворота роторов 1-го, 2-го и 3-го электродвигателей;
φз1, φз2 – углы поворота приводных звезд;
xpi, xxi – координата i – ой массы конечных элементов – аналогов тяговой цепи на рабочей и холостой ветвях.
Rз – средний радиус приводной звезды;
βп – коэффициент сопротивления редуктора приводу ВСП.
Как видно из рисунка 2, первые по порядку массы конечных элементов на рабочей и холостой ветви условно присоединены к соответствующим приводных звезд, то есть: xp1 = Rз⋅ φз1 и xх1 = -Rз⋅ φз2.
Рисунок 2 – Динамическая схема трехприводного скребкового забойного конвейера (анимация, размер–108КБ.)
В качестве обобщенных координат для математического описания системы принята дополнительная координата: φд3 – угол поворота ротора 3-го электродвигателя.
3. Алгоритм запуска конвейера на первую скорость с точки зрения обеспечения равномерной нагрузки на привод
Пусковые режимы многоприводных конвейеров предусматривают определенную последовательность включения электродвигателей головного и хвостового привода на первую и вторую скорость. В данной работе рассматривается пуск двухскоростного трёхприводного скребкового конвейера на низкую скорость (НС).
Одним из важных факторов, определяющих характер динамических процессов при запуске многоприводного конвейера с двухскоростными асинхронными электродвигателями, является задержка времени Δt1 при пуске на НШ главного привода после опережающего запуска хвостового. Одним из основных условий для выбора оптимального значения этого параметра является равенство средних уровней нагрузки на хвостовом и главном приводе при пуске и работе на НШ.
Для изучения закономерностей пусковых режимов конвейера была проведена серия вычислительных экспериментов, в которых имитировались разные случаи пуска трёхприводного скребкового конвейера КСД27.
Проблема выбора оптимального параметра Δt1 важна, поскольку может оказаться, что при работе двигателя не помогают друг другу, а мешают. При неудачном выборе последовательности пуска на первую и вторую скорость возможна несогласованность работы приводов, что приводит к не запуску конвейера.
На рисунке 3 в качестве примера приведены диаграммы процесса пуска по оптимальному алгоритма загруженного на всю длину конвейера КСД27 длиной 300 м, который транспортирует горную массу вверх под углом 15°. Погонная масса груза на полотне конвейера принималась q = 90 кг / м.
Алгоритм запуска конвейера следующий: пуск хвостового привода, затем через 0,42 с одновременный пуск двух главных двигателей. Представим этот алгоритм в формализованном виде: Г11 – Г12 – (Δt1 = -0.42) - X1. Следует отметить, что на практике используется такое или близкое значение задержки времени Δt1.
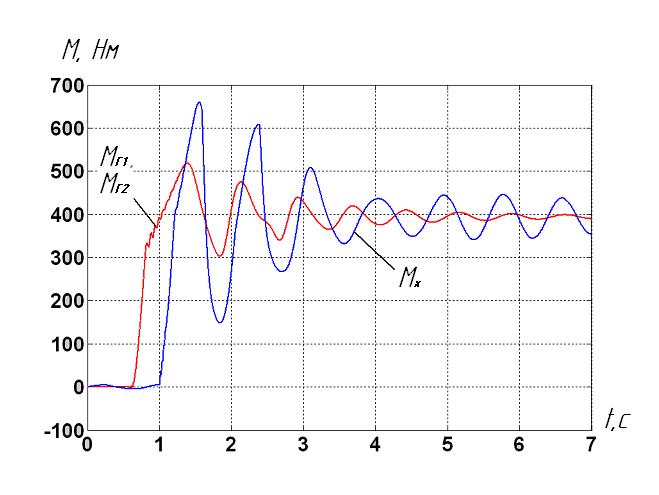
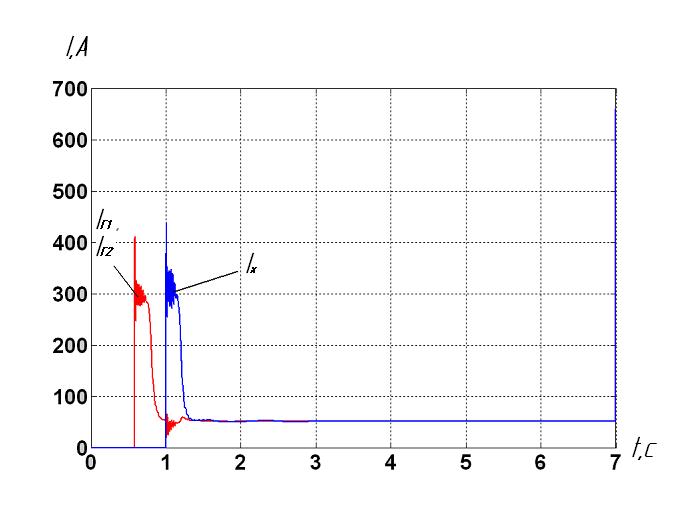
Рисунок 3 – Диаграмма изменения моментов и токов в приводах при запуске по оптимальному алгоритму: Г11 – Г12 – (Δt1 = -0.42) - X1 трёхприводного конвейера длиной 300 м
На рис. 3 представлены диаграммы процесса пуска по оптимальному алгоритму Δt1= Δt1опт = - 0.42 с. Знак "-" для значения Δt1 показывает, что первым запускаются главные приводы, а затем - хвостовой.
Как видно из рисунка, нагрузки между приводами, при запуске конвейера на низкую скорость с найденным оптимальным значением Δt1, распределяется равномерно [2].
Для определения зависимостей оптимальных значений Δt1 от параметров транспортировки проводилась серия вычислительных экспериментов. Используя результаты экспериментов, можно для различных условий эксплуатации оценить необходимое оптимальное значение задержки времени Δt1. Например, из рис. 4 видим, что для конвейера длиной 300 м, который транспортирует горную массу по горизонтали, оптимальное значение составляет 0,4 с, а при транспортировке вниз под углом - 15° Δt1 = 0,2 с.
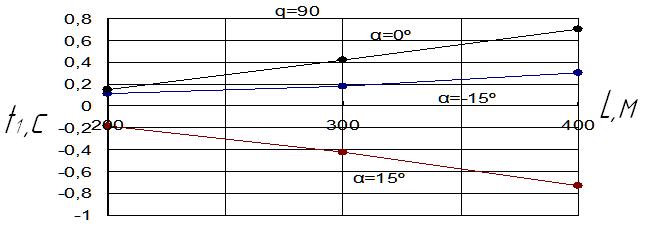
Рисунок 4 – График зависимости оптимального времени задержки Δt1 от длины конвейера L
Следует, отметить, что приведенные результаты относятся только к рассматриваемому случаю, когда погонная масса груза на полотне конвейера равна 90 кг/м. При иной степени загрузки конвейера рациональные значения времени задержки Δt1 могут существенно отличаться от приведенных на рисунке 4.
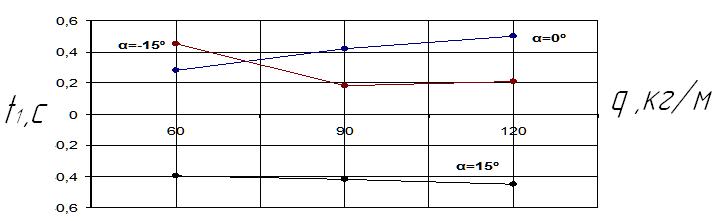
Рисунок 5. – График зависимости оптимального времени задержки Δt1 от погонной массы груза q
Из рисунка 5 видно, что для конвейера длиной 300 м, транспортируемой горной массу по горизонтали при q = 120 кг / м, оптимальное значение Δt1 составляет 0,5 с, а при транспортировке вверх под углом 15° Δt1 = - 0, 45 с.
Полученные результаты позволяют для заданных условий эксплуатации выбирать оптимальное значение времени задержки пуска главного электродвигателя.
Выводы
С использованием математической модели трёхприводного двухскоростного скребкового конвейера и соответствующего программного обеспечения проведен комплекс вычислительных экспериментов, в которых исследовано влияние параметров алгоритма запуска двухскоростных электродвигателей на процессы формирования нагрузок в хвостовом и главных приводах при запуске на низкую скорость.
Проведенный анализ позволяет сделать вывод, что к настоящему времени в технической литературе отсутствуют в необходимом объеме результаты теоретических и экспериментальных исследований и рекомендации по выбору рациональных параметров режима запуска двухскоростных трёхприводних скребковых конвейеров на низкую скорость.
Полученные результаты позволяют для каждого конкретного случая определить оптимальное значение задержки времени Δt1, которое изменяется в зависимости от условий эксплуатации конвейера от -0,8 с до +0,8 с (знак " минус " показывает, что первыми запускаются главные приводы).
Дальнейшее направление работы:
- исследования и оптимизация параметров алгоритма запуска конвейера на вторую ( высокую) скорость;
- обосновать оптимальный режим запуска двухскоростных трёхприводних скребковых конвейеров с точки зрения формирования нагрузок тягового органа;
- определить рациональный алгоритм «тяжелого» запуска конвейера при повышенных значениях сил сопротивления движению тяговой цепи;
- выполнить моделирование процессов стопорения рабочей и холостой ветви трёхприводного конвейера и оценить максимальные значения возникающих при этом нагрузок.
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: декабрь 2014 года.
Список литературы
- Андреев. Г.В., Косарев. И.В. Скребковые конвейеры нового технического уровня – Уголь Украины.- №9, 2003. – С. 30-34
- Кондрахин. В.П. Математическая модель для исследования нагрузок в двухскоростном многодвигательном приводе и тяговом органе скребкового забойного конвейера Кондрахин. В.П., Мельник. А.А., Косарев. В.В., Стадник. Н.И., Косарев. И.В. / Наукові праці Донецького національного технічного університету, вип. 16 (142), Серія: гірничо-електромеханічна, Донецьк, 2008, с. 132-140
- Бабенко. Н.П. Привод забойного скребкового конвейера // Уголь Украины, №5. - 2005.- С.28-29.
- Кондрахин. В.П., Стадник. Н.И. Пусковые режимы трехприводных двухскоростных забойных конвейеров . - Уголь Украины. - №5, 2011. - С. 45-48.
- Брихта. П. Технические возможности улучшения условий пуска загруженных конвейеров // Глюкауф.-№12, 1984.- С. 15-22
- Аренс. К. Условия запуска загруженных конвейеров с приводами обычного типа // Глюкауф.-№12, 1984.- С. 9-14
- РТМ 12.44.055-84 Конвейеры шахтные скребковые. Расчеты динамики привода и тягового органа. Гипроуглемаш, 1985
- Корнеев. С.В. Обоснование эксплуатационных параметров и способов адаптации скребковых конвейеров нового поколения. Автореферат дисс. … докт. техн. наук, – Днепропетровск, НГУ, 2007. – 35 с.
- Корнеева. С.В., Варченко. Ю.Э. «Пуск забойного скребкового конвейера в режиме монтажного натяжения тягового органа» Уголь Украины. –№7, 2004.
- Давыдов. Б.Л., Скородумов. Б.А. Динамика горных машин. М.: 1961.- 335 с.
- Обоснование конечно-елементной модели тягового органа скребкового конвейера // Кондрахин В.П., Борисенко В.Ф., Мельник А.А. и др.- Наукові праці Донецького національного технічного університету, вип.99, Серія: гірничо-електромеханічна, Донецьк, 2005, с.97-103
- Герман-Галкин. С.Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие. – СПб.: КОРОНА принт, 2001. – 320 с.,
- Кондрахин. В.П. Оптимизация алгоритма пуска многоприводных двухскоростных забойных конвейеров / В. П. Кондрахин, Н.И. Стадник, В.В. Косарев, И.В. Косарев // Форум гірників-2009: матеріали міжнар. конф., 30 верес.-3 жовт.2009 р.- Дніпропетровськ: НГУ, 2009.- С.190-196.
- Скребковые конвейеры. Справочник / Под ред. А.В.. Леусенко. - М.: Недра, 1992. – 221с.
- Барышев. А.И., В.А.. Будишевский, Скляров. Н.А., Сулима. А.А., Ткачук. А.Н. Расчёты и проектирование транспортных средств непрерывного действия.- Донецк, 2005 – 684 с.
- Чугреев. Л.И. Динамика конвейеров с цепным тяговым органом.- М.: Недра, 1976.- 256с.