
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Стан питання, мета та завдання дослідження
- 1.1. Актуальність теми роботи
- 1.2. Стан питання по вивченню пускових режимів скребкових конвеєрів
- 1.3. Мета і завдання досліджень
- 2. Розробка математичної моделі трьохприводного скребкового конвеєра на базі двошвидкісних асинхронних двигунів
- 3. Алгоритм запуску конвеєра на першу швидкість з точки зору забезпечення рівномірного навантаження на привод
- Висновки
- Перелік посилань
- 1.3. Мета і завдання досліджень
Вступ
Найважливішу роль в забезпеченні ефективної роботи вугільного підприємства і всієї вугільної промисловості в цілому відіграє транспорт вугілля. Одним з поширених видів транспортних машин на вугільних шахтах є скребковий конвеєр.
Скребкові конвеєри являють собою пристрій для транспортування безперервної дії. У них переміщення насипаних матеріалів відбувається по нерухомо закріпленому жолобу за допомогою скребків, що кріпляться до однієї або декількох тяговим ланцюгам.
Скребкові конвеєра відрізняються простотою конструкції, безпекою у використанні, можливістю передачі найрізноманітніших вантажів по трасах різної складності, простотою автоматизованої як завантаження, так і розвантаження на багатьох точках.
Відмінною особливістю сучасних скребкових вибійних конвеєрів є використання для їх приводу двошвидкісних асинхронних електродвигунів[1] .
Виконаний аналіз та світовий досвід створення і використання скребкових конвеєрів показують, що одним з перспективних засобів здійснення пуску привода на зниженій швидкості,
а також засобом реалізації зниженої швидкості приводу в тривалому режимі є двошвидкісні асинхронні короткозамкнені двигуни, оснащені двома статорними обмотками з різним числом пар полюсів.
Установка таких двигунів дозволяє виключити зі складу привода конвеєра гідромуфту, яка має ряд експлуатаційних недоліків:
–значні втрати часу на технічне обслуговування;
–витікання робочої рідини впливають на розподіл навантаження між приводами;
–низька надійність.
Досвід експлуатації вибійних скребкових конвеєрів КСД26, КСД27 і КСД28 підтвердив їх високу ефективність і, в той же час, виявив проблеми, пов'язані з утрудненим запуском завантажених конвеєрів і недостатньою надійністю редукторів та електродвигунів. Багато в чому ці проблеми пов'язані з недостатньою вивченістю перехідних процесів пуску скребкових конвеєрів, оснащених двошвидкісними електродвигунами [2].
Скребкові конвеєри з двошвидкісним двигуном виконуються з двома або трьома приводами. Ця робота присвячена дослідженню пускових режимів трьохоприводних скребкових забійних конвеєрів.
1.Стан питання, мета та завдання дослідження
1.1 Актуальність теми роботи
При пуску завантаженого конвеєра іноді виникає критична ситуація, так званий «важкий пуск конвеєра», коли динамічні навантаження на компоненти приводу значно перевищують статичні, що проявляється у швидкому перегріві асинхронних двигунів. Для пуску переобтяженого конвеєра потрібне особливо високий початковий пусковий момент, тобто великий струм. Це викликає швидке падіння напруги в живильній мережі і миттєве зниження обертаючого моменту [3].
Для запуску конвеєра в таких умовах необхідно забезпечити узгоджену роботу усіх приводів. Одним із шляхів досягнення цієї мети є вибір раціонального алгоритму запуску приводів конвеєра на першу (нижчу) і другу (високу) швидкості, тобто певної послідовності включення електродвигунів головного і хвостового приводів.
Однак на практиці при запуску трьохприводних двошвидкісних конвеєрів спостерігається неузгоджена робота приводів. Наприклад, на рис. 1 приведена осцілограма потужності приводних двигунів трехпріводного конвеєра КСД27 при пуску в представницьких шахтних умовах [4]. Як видно з малюнка 1, при пуску обидва головних електродвигуна практично не навантажені, причому в окремі періоди часу двигуни працюють в генераторному режимі.
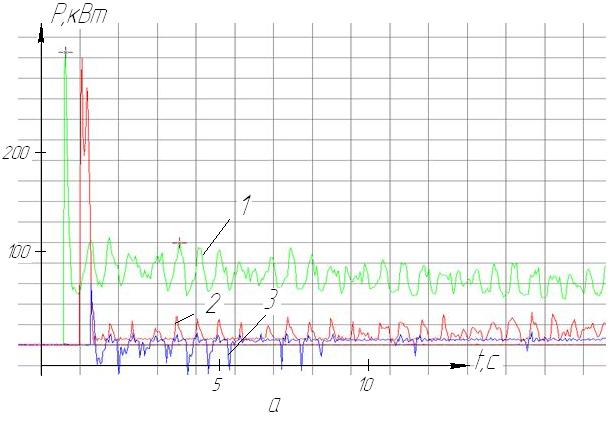
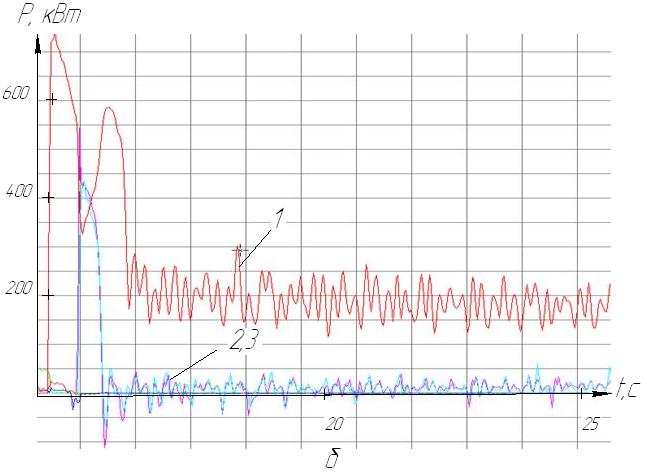
Рисунок 1. – Осцилограми потужності Р електродвигунів трьохприводного конвеєра при пуску на низьку швидкість (а) і при переході на високу швидкість (б) (1 – хвостовий привід, 2, 3 – головні приводи, шахтний експеримент)[4]
1.2. Стан питання по вивченню пускових режимів скребкових конвеєрів
Дослідженням і створенням скребкових конвеєрів займаються ряд організацій, дослідницьких інститутів, заводів в том числі: Харківський машинобудівний завод «Світло шахтаря», ВАТ "Анжеромаш", інститут «Донгипроуглемаш», ВАТ «Донецкгормаш», ВО «Донецкуглеремонт», ВАТ «Донбассуглеремонт», об'єднання «Інтрансмаш», Московський державний гірничий університет та ін.
Питаннями запуску скребкового конвеєра займалися вчені, Варченко Ю.Е., Каширських В.Г., Переверзев С.С., Браславський І.Я., Ещин Е.К, Ковач К.П., Копилов І.П., Ладензон В.А., Масанділов Л.Б., Штокман І.Г, Дьяков В.А., Шклярский, С.А., Шахмейстер Л.Г., Пейсахович Г.Я., та багато інших.
ВПитаннями запуску забійних скребкових конвеєрів з двошвидкісними двигунами займалися Аренс К.[5], Брихта П.[6], Корнеев С.В., Бабенко Н.П., Кондрахін В.П., Стадник Н.И., Косарев И.В., Косарев В.В.
Проблеми вивчення перехідних і усталених режимів роботи вибійних скребкових конвеєрів присвячена велика кількість досліджень [1-16]. У цих роботах скребковий конвеєр розглядається як складна нелінійна динамічна система, яка володіє розподіленими в просторі пружними, інерційними, дисипативними і електромагнітними властивостями. На вхід цієї системи (тяговий орган) діють в загальному випадку випадкові навантаження, які формуються в процесі взаємодії транспортованої гірничої маси з тяговим органом і рештачним ставом.
Головний недолік скребкових конвеєрів полягає в недосконалості принципу дії, а саме переміщення вантажу волочінням і рух тягового органу ковзанням. Внаслідок цього виникають великі опору руху, натягу тягового органу, підвищена витрата енергії і знос.
Інститутом «Донгипроуглемаш» в даний час розроблені скребкові конвеєри нового технічного рівня. З 1998р. інститут почав створювати типажний ряд скребкових конвеєрів КСД. Дослідний зразок типового представника - конвеєра КСД 27, виготовлений ВАТ «Донецкгормаш», а також розроблені конвеєри для тонких пологих і полого-похилих пластів КСД 26 і КСД 26В і конвеєри КСД 210, КСД 29 для потужних пластів.
Конвеєр КСД27 обладнаний уніфікованими з КСД 26 і КСД 26В редукторами, при цьому є відмінності в рамах, рештачном ставі, в потужності приводів і тяговому органі.
У роботі Андрєєва Г.В., Косарева І.В. і ін., розглянуто питання, присвячене скребковим конвеєрам нового технічного рівня. Наведені особливості розрахунку і техніко-економічних показників вживання цих конвеєрів в промисловості [1].
У роботі Бабенко М.П. [3] розглянуті питання, присвячене приводу вибійного скребкового конвеєра. Поняття «Привод вибійного скребкового конвеєра» вимагає глибокого знання характеристик робочих машин - асинхронного двигуна, редуктора, захисної муфти, ланцюгових приводних зірочок і контура. У вибійних конвеєрах пуск є визначальною робочої фазою, на яку впливає безліч факторів: завантаження і довжина конвеєра; коефіцієнт опору руху ланцюга у верхній і нижній вітках; кут падіння пласта і напрямок транспортування гірської маси; зусилля попереднього натягу ланцюга; розрив у часі пуску головного і кінцевого приводів та ін.
Динаміка приводу і тягового органу скребкового конвеєра може бути розрахована за методикою [7], заснованої на роботах Б.А. Скородумова. Проте вказані роботи відносяться до конвеєрів з традиційною структурою приводу з одношвидкісними електродвигунами і гідромуфтою.
Робота Корнєєва С.В. «Обґрунтування експлуатаційних параметрів і способів адаптації шахтних скребкових конвеєрів нового покоління», присвячена встановленню закономірностей формування навантажень в силовій системі, розробці методів комплексного дослідження і наукового обґрунтування способів і технічних засобів адаптації вибійних скребкових конвеєрів для підвищення їх ефективності шляхом приведення експлуатаційних параметрів конвеєра у відповідність реальним умовам експлуатації [8].Однак пускові режими двошвидкісних конвеєрів у зазначеній роботі не розглядалися.
У статті Корнєєва С.В., Варченко Ю.Е. [9],скребковий конвеєр розглядається як складна нелінійна динамічна система, яка володіє розподіленими в просторі пружними, інерційними, дисипативними і електромагнітними властивостями. На вхід цієї системи (тяговий орган) діють в загальному випадку випадкові навантаження, які формуються в процесі взаємодії гірської маси, що транспортується, з тяговим органом.
У книзі Давидова Б.Л., Скородумова Б.А. «Динаміка гірських машин» при дослідженні пускових режимів розглядається одноприводний скребковий конвеєр як система з двома зосередженими масами: приведена по методу Релея маса тягового органу і приєднаного до нього вантажу і приведена маса ротора двигуна і елементів редуктора [10].
Таким чином, питання обґрунтування раціонального режиму запуску двошвидкісних скребкових вибійних конвеєрів не досить добре вивчені і потребують подальших досліджень.
1.3. Мета і завдання досліджень
Мета роботи: підвищення ефективності експлуатації двошвидкісних трьохприводних забійних скребкових конвеєрів за рахунок розробки оптимального алгоритму їх запуску, що забезпечує рівномірний розподіл навантаження між приводами, мінімальні тягові зусилля ланцюга, можливість важкого запуску при високих значеннях сил опору.
Для досягнення поставленої мети необхідно вирішити наступні завдання:
- розробити та реалізувати у вигляді програмного модуля математичні моделі двошвидкісних трьохприводних забійних скребкових конвеєрів типу КСД;
- виконати ідентифікацію параметрів моделі, провести обчислювальні експерименти і шляхом аналізу результатів обчислювальних експериментів встановити закономірності впливу на пускові навантаження параметрів пускових режимів конвеєра;
- вирішити завдання оптимальної адаптації алгоритму запуску конвеєра до заданих умов експлуатації з урахуванням довжини конвеєра, кута транспортування, продуктивності з точки зору забезпечення рівномірного навантаження на головний і хвостовий приводи;
- обґрунтувати оптимальний режим запуску двошвидкісних трьохприводних скребкових конвеєрів з точки зору формування навантажень тягового органу;
- визначити раціональний алгоритм «важкого» запуску конвеєра при підвищених значеннях сил опору руху тягового ланцюга;
2. Розробка математичної моделі трьохприводного скребкового конвеєра на базі двошвидкісних асинхронних двигунів
Для оптимальної адаптації режиму пуску двошвидкісних трьохприводних скребкових конвеєрів до роботи в заданих умовах використовується розроблена ДонНТУ математична модель, яка дозволяє дослідити процес формування пускових навантажень в приводах і тяговому органі [2,4]
Розрахункова схема конвеєра, приведена на рисунок 2, включає три приводні електродвигуни. Два з них встановлені на головному приводі(включаються одночасно) і один на хвостовому приводі. При складанні схеми використано представлення тягового органу з вантажем у вигляді сукупності кінцевих елементів, що мають пружні, дисипативні і інерційні властивості. [11].
На схемі прийняті наступні позначення:
Jд – момент інерції роторів 1-го, 2-го та 3-го електродвигунів;
Mд1, Mд2 – електромагнітні моменти 1-го, 2-го та 3-го електродвигунів;
Jзв – момент інерції приводної зірки;
Сп – коефіцієнт жорсткості редуктора приводу;
mг – маса вантажу, що відповідає одному кінцевому елементу;
Fc – сила опору руху маси m ділянки тягового ланцюга і вантажу(з урахуванням складової ваги mgsinα при роботі на пласті з кутом падіння α ).
У якості узагальнених координат для математичного опису системи прийняті:
φд1, φд2, φд3 – кути повороту роторів 1-го, 2-го і 3-го електродвигунів;
φз1, φз2 – кути повороту приводних зірок;
Rз – середній радіус приводної зірки;
βп – коефіцієнт опору редуктора приводу ВСП.
xpi, xxi - координата i – ої маси кінцевих елементів – аналогів тягового ланцюга на робочій і холостій вітці.
Як видно з рисунка 2, перші по порядку маси кінцевих елементів на робочій і холостій вітці умовно приєднані до відповідних приводних зірок, тобто: xp1 = Rз⋅ φз1 и xх1 = -Rз⋅ φз2.
Рисунок 2 – Динамічна схема трьохприводного скребкового забійного конвеєра (анімація, розмір–108КБ)
В якості узагальнених координат для математичного опису системи прийнята додаткова координата: φд3 – кут повороту ротора 3-го електродвигуна.
3. Алгоритм запуску конвеєра на першу швидкість з точки зору забезпечення рівномірного навантаження на привод
Пускові режими багатоприводних конвеєрів передбачають певну послідовність включення електродвигунів головного і хвостового приводів на першу швидкість, а потім і другу швидкість. Спочатку розглянемо питання, що стосуються запуску конвеєра на першу (нижчу) швидкість (НШ).
Одним з важливих факторів, що визначають характер динамічних процесів при запуску багатоприводного конвеєра з двохшвидкісними асинхронними електродвигунами, є затримка часу Δt1 при пуску на НШ головного приводу після випереджального запуску хвостового. Однією з основних умов для вибору оптимального значення цього параметра є рівність середніх рівнів навантаження на хвостовому і головному приводі при пуску і роботі на НШ.
Для вивчення закономірностей пускових режимів конвеєра була проведена серія обчислювальних експериментів, в яких імітувалися різні випадки пуску багатоприводного скребкового конвеєра КСД27.
Проблема вибору оптимального параметра Δt1 важлива, оскільки може виявитися, що при роботі двигуни не допомагають один одному, а заважають. При невдалому виборі послідовності пуску на першу і другу швидкість можлива неузгодженість роботи приводів, що призводить до не запуску конвеєра.
На рисунку 3, як приклад приведені діаграми процесу пуску по оптимальному алгоритму завантаженого на всю довжину конвеєра КСД27 завдовжки 300 м,
що транспортує гірську масу вгору під кутом 15°. Погонна маса вантажу на полотні конвеєра приймалася q=90 кг/м.
q = 90 кг / м.
Алгоритм запуску конвеєра наступний: пуск хвостового приводу, потім через 0,42 с одночасний пуск двох головних двигунів. Представимо цей алгоритм у формалізованому виді: Г11 – Г12 – (Δt1 = -0.42) - X1. Слід зазначити, що на практиці використовується таке або близьке значення затримки часу Δt1.
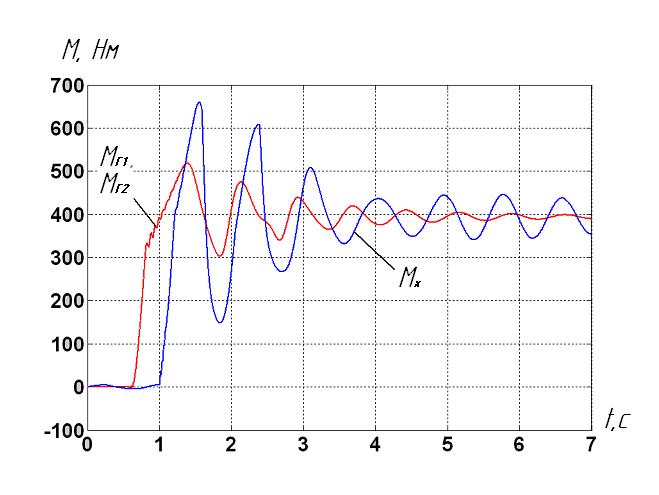
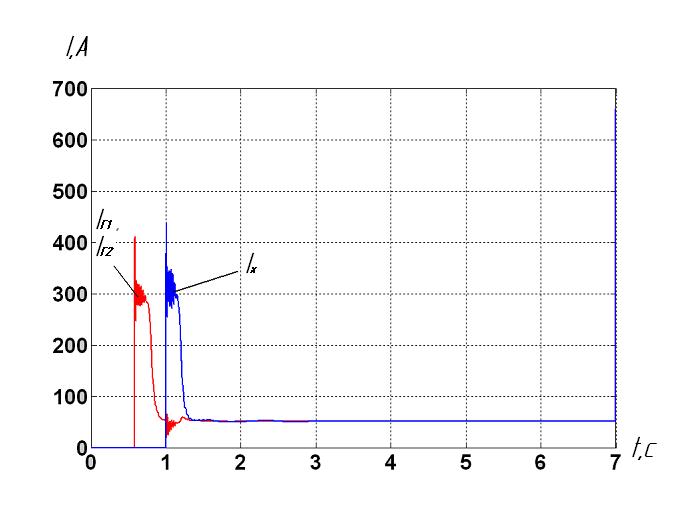
Рисунок 3 – Діаграми зміни моментів і струмів в приводах при запуску по оптимальному алгоритму: Г11 – Г12 – (Δt1 = -0.42) - X1 трьохприводного конвеєра завдовжки 300 м
На рис. 3 представлені діаграми процесу пуску по оптимальному алгоритму Δt1= Δt1опт = - 0.42 с. Знак "-" для значення Δt1 показує, що першим запускаються головні приводи, а потім - хвостовий.
КЯк видно з рисунку, навантаження між приводами, при запуску конвеєра на низьку швидкість зі знайденим оптимальним значенням Δt1, розподіляється рівномірно [2].
Для визначення залежностей оптимальних значень Δt1 від параметрів транспортування проводилася серія обчислювальних експериментів. Використовуючи результати експериментів, можна для різних умов експлуатації оцінити необхідне оптимальне значення затримки часу Δt1. Наприклад, з рис. 4 бачимо, що для конвеєра завдовжки 300 м, що транспортує гірську масу по горизонталі, оптимальне значення складає 0,4 с, а при транспортуванні вниз під кутом - 15° Δt1 = 0,2 с.
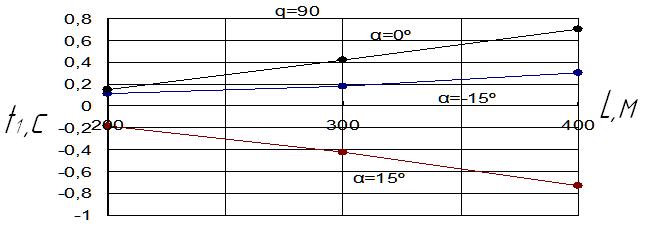
Рисунок 4 – Графік залежності оптимального часу затримки Δt1 від довжини конвеєра L
Слідує, відзначити, що приведені результати відносяться тільки до розглянутого випадку, коли погонна маса вантажу на полотні конвеєра дорівнює 90 кг/м. При іншій мірі завантаження конвеєра раціональні значення часу затримки Δt1 можуть істотно відрізнятися від приведених на рисунку 4.
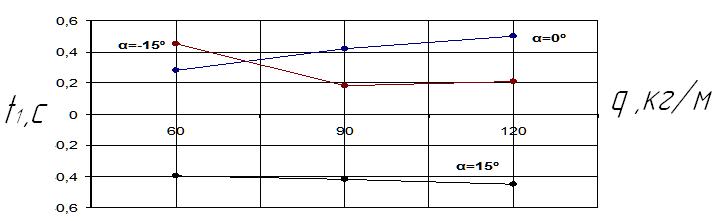
Рисунок 5. – Графік залежності оптимального часу затримки Δt1 від погонної маси вантажу q
З рисунка 5 бачимо, що для конвеєра завдовжки 300 м, транспортуємого гірську масу по горизонталі при q=120 кг/м, оптимальне значення Δt1 складає 0,5 с, а при транспортуванні вгору під кутом 15° Δt1 = - 0, 45 с.
Отримані результати дозволяють для заданих умов експлуатації вибирати оптимальне значення часу затримки пуску головного електродвигуна.
Висновки
З використанням математичної моделі трьохприводного двошвидкісного скребкового конвеєра і відповідного програмного забезпечення проведений комплекс обчислювальних експериментів, в яких досліджений вплив параметрів алгоритму запуску двошвидкісних електродвигунів на процеси формування навантажень в хвостовому і головних приводах при запуску на низьку швидкість.
Проведений аналіз дозволяє зробити висновок, що до теперішнього часу в технічній літературі відсутні в необхідному обсязі результати теоретичних і експериментальних досліджень та рекомендації по вибору раціональних параметрів режиму запуску двошвидкісних трьохприводніх скребкових конвеєрів на низьку швидкість.
Отримані результати дозволяють для кожного конкретного випадку визначити оптимальне значення затримки часу Δt1, яке змінюється залежно від умов експлуатації конвеєра від -0,8с до +0,8с(знак "мінус" показує, що першими запускаються головні приводи).
Подальший напрям роботи:
- дослідження і оптимізація параметрів алгоритму запуску конвеєра на другу(високу) швидкість;
- обґрунтувати оптимальний режим запуску двошвидкісних трьохприводних скребкових конвеєрів з точки зору формування навантажень тягового органу;
- визначити раціональний алгоритм «важкого» запуску конвеєра при підвищених значеннях сил опору руху тягового ланцюга;
- виконати моделювання процесів стопоріння робочої та холостої вітки трьохприводного конвеєра і оцінити максимальні значення виникаючих при цьому навантажень.
При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення: грудень 2014 року.
Перелік посилань
- Андреев. Г.В., Косарев. И.В. Скребковые конвейеры нового технического уровня – Уголь Украины.- №9, 2003. – С. 30-34
- Кондрахин. В.П. Математическая модель для исследования нагрузок в двухскоростном многодвигательном приводе и тяговом органе скребкового забойного конвейера Кондрахин. В.П., Мельник. А.А., Косарев. В.В., Стадник. Н.И., Косарев. И.В. / Наукові праці Донецького національного технічного університету, вип. 16 (142), Серія: гірничо-електромеханічна, Донецьк, 2008, с. 132-140
- Бабенко. Н.П. Привод забойного скребкового конвейера // Уголь Украины, №5. - 2005.- С.28-29.
- Кондрахин. В.П., Стадник. Н.И. Пусковые режимы трехприводных двухскоростных забойных конвейеров . - Уголь Украины. - №5, 2011. - С. 45-48.
- Брихта. П. Технические возможности улучшения условий пуска загруженных конвейеров // Глюкауф.-№12, 1984.- С. 15-22
- Аренс. К. Условия запуска загруженных конвейеров с приводами обычного типа // Глюкауф.-№12, 1984.- С. 9-14
- РТМ 12.44.055-84 Конвейеры шахтные скребковые. Расчеты динамики привода и тягового органа. Гипроуглемаш, 1985
- Корнеев. С.В. Обоснование эксплуатационных параметров и способов адаптации скребковых конвейеров нового поколения. Автореферат дисс. … докт. техн. наук, – Днепропетровск, НГУ, 2007. – 35 с.
- Корнеева. С.В., Варченко. Ю.Э. «Пуск забойного скребкового конвейера в режиме монтажного натяжения тягового органа» Уголь Украины. –№7, 2004.
- Давыдов. Б.Л., Скородумов. Б.А. Динамика горных машин. М.: 1961.- 335 с.
- Обоснование конечно-елементной модели тягового органа скребкового конвейера // Кондрахин В.П., Борисенко В.Ф., Мельник А.А. и др.- Наукові праці Донецького національного технічного університету, вип.99, Серія: гірничо-електромеханічна, Донецьк, 2005, с.97-103
- Герман-Галкин. С.Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие. – СПб.: КОРОНА принт, 2001. – 320 с.,
- Кондрахин. В.П. Оптимизация алгоритма пуска многоприводных двухскоростных забойных конвейеров / В. П. Кондрахин, Н.И. Стадник, В.В. Косарев, И.В. Косарев // Форум гірників-2009: матеріали міжнар. конф., 30 верес.-3 жовт.2009 р.- Дніпропетровськ: НГУ, 2009.- С.190-196.
- Скребковые конвейеры. Справочник / Под ред. А.В.. Леусенко. - М.: Недра, 1992. – 221с.
- Барышев. А.И., В.А.. Будишевский, Скляров. Н.А., Сулима. А.А., Ткачук. А.Н. Расчёты и проектирование транспортных средств непрерывного действия.- Донецк, 2005 – 684 с.
- Чугреев. Л.И. Динамика конвейеров с цепным тяговым органом.- М.: Недра, 1976.- 256с.