
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Моделювання мостового крану в Comsol Multiphysics
- 2. Огляд результатів моделювання
- Висновки
- Перелік посилань
Вступ
На даний час модернізація кранових механізмів є актуальною задачею. Автоматизація процесів і вдосконалення обладнання дозволяє знизити енерговитрати і підвищити ефективність виробництва за рахунок зменшення часу циклу при переміщенні вантажів.
Як правило, синтез регуляторів та виведення законів керування проводять без урахування пружніх властивостей механічної частини кранових установок. При цьому зі збільшенням довжини конструкцій, їх пружні коливання призводять до значного збільшення механічної напруги, що знижує термін експлуатації кранів за рахунок прояву втоми металів. В цьому випадку пружні коливання описують диференційними рівняннями в приватних похідних, які вирішуються методом кінцевих елементів. Тому останнім часом для рішення таких завдань все частіше застосовують спеціалізовані програмні пакети, орієнтовані на дослідження об'єктів.
Для мостових кранів з великою довжиною прольоту амплітуда пружніх коливань в напрямку руху моста може досягати декількох десятків міліметрів, що призводить до значного збільшення механічної напруги в окремих вузлах конструкції. Питання горизонтальних коливань балок мостового крана практично не розглядається в літературі, незважаючи на їх широке поширення.
1. Моделювання мостового крану в Comsol Multiphysics
Для моделювання процесів в механічних системах в пакеті Comsol Multiphysics служить модуль Multibody Dinamics, що містить різні бібліотеки, призначені для моделювання таких систем.
Створення моделі в даній програмі відбувається наступним чином.
- Необхідно задати розмірність графічного простору 3D, 2D, 1D.
- Вказати область досліджуваних фізичних явищ і тип розв'язуваної задачі, наприклад, статичний або перехідний режим, власні частоти коливань та ін.
- Cформувати геометрію досліджуваного об'єкта, для чого є графічний інтерфейс Geometry, а також є можливість імпортування моделей, створених в спеціалізованих графічних редакторах.
- Вказати властивості матеріалу, з якого виготовлена конструкція, для цього передбачена билиотека Materials. Розширення бібліотеки містить понад 2500 матеріалів і десятки тисяч функцій властивостей, що залежать від температури.
- Згрупувати елементи конструкції і позначити зв'язок цих елементів (жорсткий зв'язок, гнучка, різні види з'єднань, шарніри).
- Вказати фізичні властивості об'єкта, для чого є графічний інтерфейс Physics.
Як приклад розглянемо процес створення моделі мостового крану (див. Рис. 1). За основу візьмемо дані мостового крану 10-5К-20-10 У2.
Рисунок 1 – Модель мостового крану.
Варто зазначити, що при створенні моделі габарити вантажу можуть перевершувати габарити моста. Для реалізації реальних співвідношень, щільність матеріалу вантажу і каната вибирається в рази менше, відносно матеріалу моста. В даному випадку для моста була обрана сталь UNS T30111, а для вантажу і каната алюміній UNS A91050.
Виходячи з міркувань, що в більшості випадків зовнішнім контуром регулювання в системі автоматизованого кранового електроприводу є контур швидкості, для створення моделі використовуємо бібліотеку Multibody Dinamics, яка дозволяє безпосередньо обчислювати лінійну швидкість в обох напрямках в будь-якій точці конструкції.
Дана модель виконана у вигляді суцільних металевих балок, тому що створення тонкостінних моделей ускладнює модель і збільшує необхідний обсяг оперативної пам'яті, а також час розрахунку перехідних процесів.
Рисунок 2 – Мультифiзична модель мостового крану.
анімація: 16 кадрів, 10 циклів, 160 кілобайт.
З метою максимального спрощення моделі міст представляємо у вигляді двох суцільнометалевих профілів з прямокутним перетином і заниженими значеннями щільності і модуля пружності матеріалу так, щоб маса конструкції і її жорсткість приблизно відповідала реальним даними.
Модель мостового крану складається з двох поперечних балок, по краях закріплених на платформах. До платформ прикладена сила, рівна моменту приводів переміщують крана. Положення візки вибрано як ідеальний випадок, по центру. Візок зроблена у вигляді платформи до якої підвішений вантаж. У зв'язку зі скрутним процесом створення канатів був використаний жорсткий шарнір. Варто відзначити, що маса моделі приблизно дорівнює масі реального мостового крану.
Застосування січення спеціальної форми дає змогу створювати механічні конструкції мостових кранів, які при відносно невеликій масі володіють досить високою жорсткістю. Однак зі збільшенням прольоту податливість до конструкції впливу пружних коливань збільшується.
Традиційно аналіз пружних коливань механічних системах проводять шляхом подання всієї конструкції сукупністю мас з пружними зв'язками між ними, тобто поданням всієї конструкції у вигляді многомассовой системи. При цьому виділяють найбільш суттєві частоти коливань і, залежно від їх кількості, вибирають порядок системи. Якщо в системі присутня тільки одна істотна частота власних коливань, то її динамічні властивості з достатнім ступенем точності буде передавати двомассовая система. Для неї існує багато методів гасіння пружних коливань, однак найбільший інтерес викликає застосування модального управління. При цьому динамічні властивості замкнутої системи визначатися розташуванням її полюсів, яке залежить від коефіцієнтів зворотних зв'язків по змінним стану системи. Якщо ж є можливість вимірювання або ідентифікації цих змінних, шляхом підбору розташування полюсів можна отримати бажаний характер перехідних процесів, який в даному випадку передбачає гасіння пружних коливань конструкції.
При роботі механізму виникають коливання в його металоконструкціях і трансмісійних валах (через наявність пружного зв'язку), крім того, відбувається розгойдування вантажу (який разом з канатом утворює маятник з рухомою точкою підвісу). Динамічні навантаження в пружних зв'язках механізмів пересування можуть в 3–7 і більше разів перевищити статичні завантаження, а митників коливання вантажу викликають нерівномірне рух механізмів пересування кранів або візків і створюють незручності при їх експлуатації.
2. Огляд результатів моделювання
Точність результатів моделювання, отриманих з цієї моделі, буде залежати від ступеня відповідності геометрії моделі реальним розмірам установки. При цьому слід враховувати, що наявність дрібних деталей у конструкції значно збільшує необхідний для розрахунків об'єм машинної пам'яті. Тому конструкцію доцільно будувати у вигляді сукупності балок, переріз яких відповідає розмірам розглянутого крана. У цьому випадку значно зростає маса конструкції, тому необхідно знизити щільність і жорсткість матеріалу, з якого вона виконана. Крім цього, скрутним є моделювання процесу розгойдування і підйому вантажу з-за відсутності можливості створення шарнірних з'єднань і гнучких канатів, а реалізація руху візка по мосту пов'язана з низкою труднощів. Тому обмежимося однією вантажопідйомної візка без вантажу, жорстко фіксованою в деякій точці конструкції мосту. Нехтуючи пружністю контакту рейки і колеса, можна вважати, що опорні балки крана не можуть рухатися в поперечному напрямку і по вертикалі, що реалізується шляхом накладення заборони на переміщення нижніх граней опорних балок. Зусилля, що виробляється приводними двигунами, можна реалізувати шляхом додатка еквівалентної за величиною сили до крайніх гранях опорних балок в напрямку руху моста. Дію сили тяжіння можна врахувати, ввівши розподілений по всьому об'єму конструкції силу, вычисляемую як F = gρ, де ρ – щільність матеріалу. Встановивши візок в середній точці і приклавши протягом 1 секунди до крайніх гранях зусилля, отримаємо наведені на рис. 2 графіки складових швидкостей за двома осями: горизонтальної, вздовж якої здійснюється рух, і вертикальній.
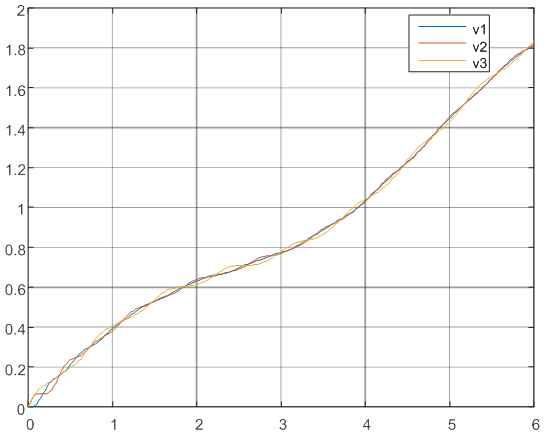
Рисунок 2 – Графік швидкості точок v1, v2 і v3 від часу
На графіку видно зміна швидкостей переміщення моста крана в точках v1, v2 і v3. Точки v1 і v3. розташовані по краях балок крана, а точка v2 по центру. Тому що, швидкості практично збігаються, доцільно, було б представити графік різниці швидкостей, для нагладности наявності коливальних процесів. Графік різниці швидкостей представлений на Рисунку 3.
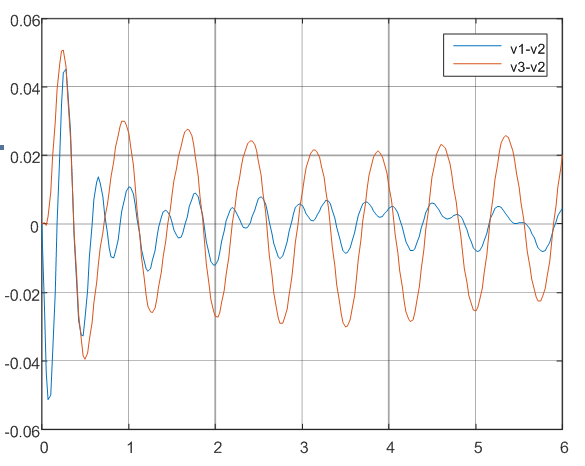
Рисунок 3 – Залежність різниці швидкостей v1, v2 і v3 від часу
На графіку видно виражені коливання вантажу і конструкції. Амплітуди збігаються по фазі, на першій ділянці v1-v2 виражено дві частоти, це частота коливання конструкції і частота коливання вантажу, на другій ділянці v2-v3, простежується та сама частота, але з більшою амплітудою, це обумовлено тим, що коефіцієнт жорсткості на цьому ділянці менше.
Доказом впливу розгойдування вантажу можна уявити змінювати амплітуду графіків.
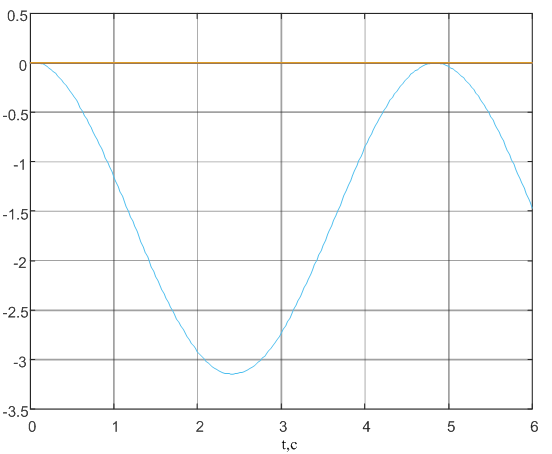
Рисунок 4 – Графік кута зсуву вантажу
З графіка видно, що коливання вантажу при початку переміщення становить близько 3 градусів. Частота коливання вантажу відповідає очікуванням.
Математичний маятник при русі з постійною прискоренням розгойдується тільки в одній півплощині, це ж ми спостерігаємо на графіку.
Таким чином, розроблена модель дозволяє проводити дослідження пружних коливань конструкції мостового крана.
Висновки
Горизонтальне переміщення моста крана з візком, нерухомо закріпленої в його точці, можна з достатньою точностю моделювати в пакеті Comsol Multiphysics. Така модель дозволяє синтезувати регулятор швидкості для ефективного гасіння коливань конструкції мостового крану в напрямку його руху. Дослідження варто продовжити з урахуванням руху візка з підвішеним до неї вантажем.
При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення: травень 2017 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Перелік посилань
- Comsol Multiphysics User’s Guide. Version 5.0, 2015
- Comsol Multiphysics MultibodyDynamics Application Library Manual. Version 5.0, 2015
- Макурин А. В., Морозов Д. И. Динамика продольного перемещения мостового крана с учетом упругости элементов конструкции // Электротехнические и компьютерные системы. – 2011. – № 3 (79). – С. 167–169.
- Бажутин Д. В. Моделирование упругих колебаний конструкций крановых установок в пакете Comsol Multiphysics. Научные работы ВНТУ, 2013, № 4
- Толочко О. И., Палис Ф., Бажутин Д. В. Гашение горизонтальных упругих колебаний конструкции мостового крана / О. И. Толочко, Ф. Палис, Д. В. Бажутин // Електромеханічні і енергозберігаючі системи. Тематичний випуск «Проблеми автоматизованого електропривода. Теорія і практика» - Кременчук: КрНУ, 2012. – Вип. 3/2012 (19). – С. 336-339.
- Коцегуб П. Х., Баринберг В. А., Толочко О. И., Федоряк Р. В. Оптимизация двухмассовых систем регулирования скорости // Известия вузов. Электроме-ханика. – 1998. – №4. – С. 54-57
- Палис Ф, Толочко О. И., Бажутин Д. В. Анализ поперечных колебаний мостового крана при изменении положения тележки / Ф. Палис, О.И. Толочко, Д. В. Бажутин // Вісник Національного технічного університету «Харківський політехнічний інститут». – Харків: НТУ «ХПІ», 2013, №36 (1009). – С. 36-39.
- Божко В. И. Гашение колебаний в электромеханических системах с упругими связями//Персональный сайт на портале магистров ДонНТУ, 2015 г.