
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Моделирование мостового крана в Comsol Multiphysics
- 2. Обзор результатов моделирования
- Выводы
- Список источников
Введение
В настоящее время модернизация крановых механизмов является актуальной задачей. Автоматизация процессов и совершенствование оборудования позволяет снизить энергозатраты и повысить эффективность производства за счет уменьшения времени цикла при перемещении грузов.
Как правило, синтез регуляторов и вывод законов управления проводят без учета упругих свойств механической части крановых установок. При этом с увеличением длин конструкций их упругие колебания приводят к значительному увеличению механических напряжений, что снижает срок эксплуатации кранов за счет проявления усталости металлов. В этом случае упругие колебания описывают дифференциальными уравнениями в частных производных, решаемые методом конечных элементов. Поэтому в последнее время для решения таких задач все чаще применяют специализированные программные пакеты, ориентированные на исследование объектов [4].
Для мостовых кранов с большой длиной пролета амплитуда упругих колебаний в направлении движения моста может достигать нескольких десятков миллиметров, что приводит к значительному увеличению механических напряжений в отдельных узлах конструкции. Вопрос горизонтальных колебаний балок мостового крана практически не затронут в литературе, несмотря на их широкое распространение и является актуальным направлением исследований [8].
1. Моделирование мостового крана в Comsol Multiphysics
Для моделирования процессов в механических системах в пакете Comsol Multiphysics служит модуль Multibody Dinamics (динамика многих тел), содержащий различные библиотеки, предназначенные для моделирования конкретных систем.
Создание модели в данной программе происходит следующим образом.
- Необходимо задать размерность графического пространства 3D, 2D, 1D.
- Указать область исследуемых физических явлений и тип решаемой задачи, например, статический или переходный режим, собственные частоты колебаний и др.
- Cформировать геометрию исследуемого объекта, для чего имеется графический интерфейс Geometry а также имеется возможность импортирования моделей, созданных в специализированных графических редакторах.
- Указать свойства материала, из которого изготовлена конструкция, для этого предусмотрена билиотека Materials. Расширение «Библиотека материалов» содержит более 2500 материалов и десятки тысяч функций свойств, зависящих от температуры.
- Сгруппировать элементы конструкции и обозначить связь этих элементов (жесткая связь, гибкая, различные виды соединений, шарниры).
- Указать физические свойства объекта, для чего имеется графический интерфейс Physics.
В качестве примера рассмотрим процесс создания модели мостового крана (см. рис. 1). За основу примем данные мостового крана 10-5К-20-10 У2.
Рисунок 1 – Модель мостового крана.
Стоит отметить, что при создании модели габариты груза могут превосходить габариты моста. Для реализации реальных соотношений, плотность материала груза и каната выбирается в разы меньше, чем материал моста. В данном случае для моста была выбрана сталь UNS T30111, а для груза и каната алюминий UNS A91050.
Исходя из соображений, что в большинстве случаев внешним контуром регулирования в системе автоматизированного кранового электропривода является контур скорости, для создания модели используем библиотеку Multibody Dinamics, которая позволяет непосредственно вычислять линейную скорость в любом направлении в любой точке конструкции.
Данная модель выполнена в виде сплошных металлических балок, т.к. создание тонкостенных моделей усложняет модель и увеличивает требуемый объем оперативной памяти, а также время расчета переходных процессов.
Рисунок 2 – Мультифизическая модель мостового крана.
анимация: 16 кадров, 10 циклов, 160 килобайт.
C целью максимального упрощения модели мост представляем в виде двух цельнометаллических профилей с прямоугольным сечением и заниженными значениями плотности и модуля упругости материала так, чтобы масса конструкции и ее жесткость примерно соответствовала реальным данным.
Модель мостового крана состоит из двух поперечних балок, по краям закрепленных на платформах. К платформам приложена сила, равная моменту приводов перемещающих крана. Положение тележки выбрано как идеальный случай, по центру. Тележка сделана в виде платформы к которой подвешен груз. В связи с затруднительным процессом создания канатов был использован жесткий шарнир. Стоит отметить, что масса модели приблизительно равна массе реального мостового крана.
Применение сечений специальной формы позволяет создавать механические конструкции мостовых кранов, которые при относительно небольшой массе обладают достаточно высокой жесткостью. Однако с увеличением пролета податливость конструкции к воздействию упругих колебаний увеличивается.
Традиционно анализ упругих колебаний в механических системах проводят путем представления всей конструкции совокупностью масс с упругими связями между ними, т.е. представлением всей конструкции в виде многомассовой системы [3]. При этом выделяют наиболее существенные частоты колебаний и, в зависимости от их количества, выбирают порядок системы. Если в системе присутствует только одна существенная частота собственных колебаний, то её динамические свойства с достаточной степенью точности будет передавать двухмассовая система. Для неё существует много методов гашения упругих колебаний, однако наибольший интерес вызывает применение модального управления. При этом динамические свойства замкнутой системы определяться расположением ее полюсов, которое зависит от коэффициентов обратных связей по переменным состояния системы. Если же есть возможность измерения или идентификации этих переменных, то путем подбора расположения полюсов можно получить желаемый характер переходных процессов, который в данном случае предусматривает гашение упругих колебаний конструкции.
При работе механизма возникают колебания в его металлоконструкциях и трансмиссионных валах (из-за наличия упругой связи), кроме того, происходит раскачивание груза (который вместе с канатом образует маятник с подвижной точкой подвеса). Динамические нагрузки в упругих связях механизмов передвижения могут в 3–7 и более раз превысить статические загрузки, а маятниковые колебания груза вызывают неравномерное движение механизмов передвижения кранов или тележек и создают неудобства при их эксплуатации.
2. Обзор результатов моделирования
Точность результатов моделирования, полученных из этой модели, будет зависеть от степени соответствия геометрии модели реальным размерам установки. При этом следует учитывать, что наличие мелких деталей в конструкции значительно увеличивает необходимый для расчетов объем машинной памяти. Поэтому конструкцию целесообразно строить в виде совокупности балок, сечение которых соответствует размерам рассматриваемого крана. В этом случае значительно возрастает масса конструкции, поэтому необходимо снизить плотность и жесткость материала, из которого она выполнена. Помимо этого, затруднительным является моделирование процесса раскачивания и подъема груза из-за отсутствия возможности создания шарнирных соединений и гибких канатов, а реализация движения тележки по мосту связана с рядом трудностей. Поэтому ограничимся одной грузоподъемной тележкой без груза, жестко зафиксированной в некоторой точке конструкции моста. Пренебрегая упругостью контакта рельса и колеса, можно считать, что опорные балки крана не могут двигаться в поперечном направлении и по вертикали, что реализуется путем наложения запрета на перемещения нижних граней опорных балок. Усилие, вырабатываемое приводными двигателями, можно реализовать путем приложения эквивалентной по величине силы к крайним граням опорных балок в направлении движения моста. Действие силы тяжести можно учесть, введя распределенную по всему объему конструкции силу, вычисляемую как F = gρ, где ρ – плотность материала. Установив тележку в средней точке и приложив в течение 1 секунды к крайним граням усилие, получим приведенные на рис. 2 графики составляющих скоростей по двум осям: горизонтальной, вдоль которой осуществляется движение, и вертикальной.
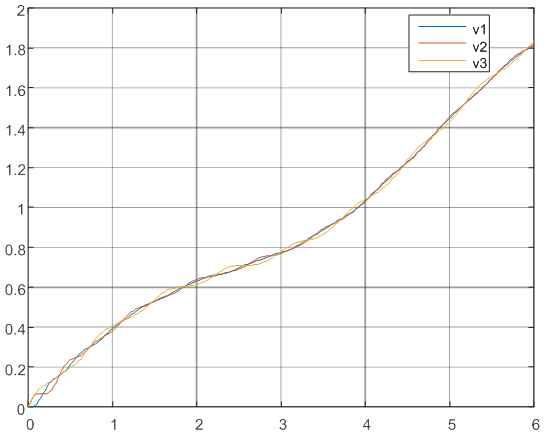
Рисунок 2 – График скорости точек v1, v2 и v3 от времени
На графике видно изменение скоростей перемещения моста крана в точках v1, v2 и v3. Точки v1 и v3. расположены по краям балок крана, а точка v2 по центру. Т.к. скорости практически совпадают, целесообразно было бы представить график разности скоростей, для нагладности наличия колебательных процессов. График разности скоростей представлен на Рисунке 3. Графики горизонтальных скоростей получены для крайних точек конструкции, а также тележки. Вертикальные перемещения возможны только лишь для главных балок, поэтому величину деформации балок в вертикальном направлении фиксируем в точке, в которой установлена тележка. Очевидно, что в виду симметричности конструкции скорости в крайних точках абсолютно идентичны. Вертикальные колебания имеют незатухающий характер, поскольку силы внутреннего вязкого трения не были учтены при создании модели.
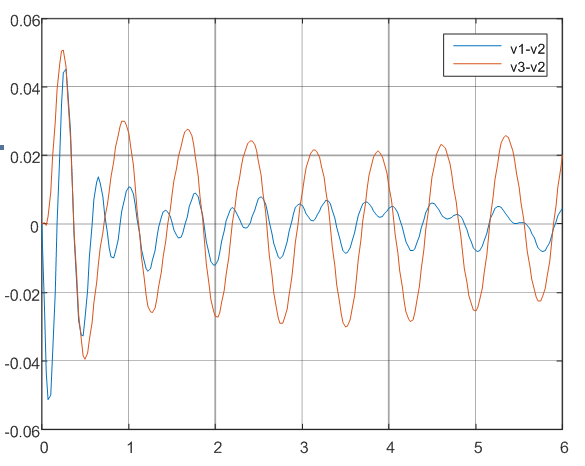
Рисунок 3 – Зависимость разницы скоростей v1, v2 и v3 от времени
На графике видно ярко выраженные колебания груза и конструкции. Амплитуды совпадают по фазе, на первом участке v1-v2 выражено две частоты, это частота колебания конструкции и частота колебания груза, на втором участке v2-v3, прослеживается та же частота, но с большей амплитудой, это обусловлено тем, что коэффициент жесткости на этом участке меньше.
Доказательством влияния раскачивания груза можно представить изменяющеюся амплитуду графиков.
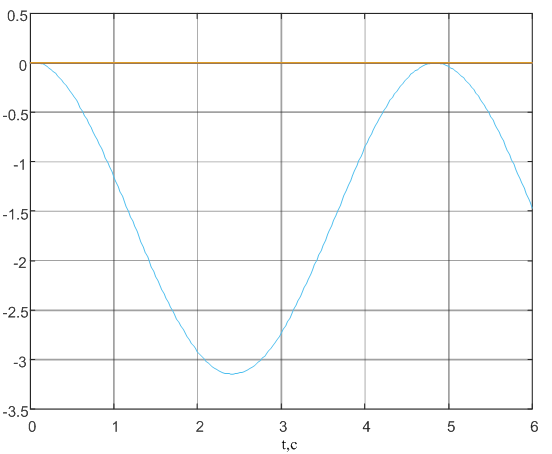
Рисунок 4 – График угла смещения груза
Из графика видно, что колебание груза при начале перемещения составляет около 3 градусов. Частота колебания груза соответствует ожиданиям.
Математический маятник при движении с постоянным ускорением раскачивается только в одной полуплоскости, это же мы наблюдаем на графике.
Таким образом, разработанная модель позволяет проводить исследования упругих колебаний конструкции мостового крана.
Выводы
Горизонтальное перемещение моста крана с тележкой, неподвижно закрепленной в его точке, можно с достаточной степенью точности моделировать в пакете Comsol Multiphysics. Такая модель позволяет синтезировать регулятор скорости для эффективного гашения колебаний конструкции моста в направлении его движения. Исследования следует продолжить с учетом движения тележки с подвешенным к ней грузом.
При написании данного реферата магистерская работа еще не завершена. Окончательное завершение: май 2017 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
- Comsol Multiphysics User’s Guide. Version 5.0, 2015
- Comsol Multiphysics MultibodyDynamics Application Library Manual. Version 5.0, 2015
- Макурин А. В., Морозов Д. И. Динамика продольного перемещения мостового крана с учетом упругости элементов конструкции // Электротехнические и компьютерные системы. – 2011. – № 3 (79). – С. 167–169.
- Бажутин Д. В. Моделирование упругих колебаний конструкций крановых установок в пакете Comsol Multiphysics. Научные работы ВНТУ, 2013, № 4
- Толочко О. И., Палис Ф., Бажутин Д. В. Гашение горизонтальных упругих колебаний конструкции мостового крана / О. И. Толочко, Ф. Палис, Д. В. Бажутин // Електромеханічні і енергозберігаючі системи. Тематичний випуск «Проблеми автоматизованого електропривода. Теорія і практика» - Кременчук: КрНУ, 2012. – Вип. 3/2012 (19). – С. 336-339.
- Коцегуб П. Х., Баринберг В. А., Толочко О. И., Федоряк Р. В. Оптимизация двухмассовых систем регулирования скорости // Известия вузов. Электроме-ханика. – 1998. – №4. – С. 54-57
- Палис Ф, Толочко О. И., Бажутин Д. В. Анализ поперечных колебаний мостового крана при изменении положения тележки / Ф. Палис, О. И. Толочко, Д. В. Бажутин // Вісник Національного технічного університету «Харківський політехнічний інститут». – Харків: НТУ «ХПІ», 2013, №36 (1009). – С. 36-39.
- Божко В. И. Гашение колебаний в электромеханических системах с упругими связями//Персональный сайт на портале магистров ДонНТУ, 2015 г.