
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження, плановані результати
- 3. Регулювання положення
- 3.1 Загальні відомості
- 3.2 Регулятори положення
- 3.3 Задатчик положення
- 4. Вибір мікроконтролера
- Список джерел
Вступ
Виробництво на сучасних підприємствах складно уявити без електромеханічних систем, що мають регулювання по положенню. Їх ще називають позиційними. Прикладами установок з позиційним електроприводом можуть служити різні підйомно транспортні установки, деякі типи роботів, маніпулятори [1]. Найбільш часто позиціонування здійснюється при використанні сервоприводів, які можуть бути реалізовані як на базі двигуна постійного, так і змінного струмів.
1. Актуальність теми
Зі збільшенням вимог до якості продукції зростають вимоги і до точності реалізації керуючих впливів в позиційних системах. Також важливим фактором є вартість і час розробки і налагодження подібних систем. Тому виникає питання у виборі відповідного мікроконтролера і використовуваного програмного забезпечення для його програмування.
2. Мета і задачі дослідження, плановані результати
Метою даної роботи є розробка і реалізація системи підлеглого регулювання положення електроприводом. Для вирішення завдання потрібно вибрати мікроконтролер, що має достатню потужність для роботи системи управління в режимі реального часу, датчики струму на ефекті Холла, датчики швидкості і положення. Система буде реалізовуватися на базі вже наявного лабораторного стенду, що включає в себе два двигуна постійного струму, тахогенератор і датчик положення, два тиристорних перетворювача, гальванічні розв'язки і мікропроцесорну плату, обрану для реалізації поставленого завдання.
3. Регулювання положення
3.1 Загальні відомості
Для забезпечення виконання ряду технологічних процесів потрібне переміщення виконавчих органів робочих машин і механізмів в задану точку простору або площини і їх установка там (фіксування) із заданою точністю [2].
У випадках, коли точність позиціонування не є високою, застосовуються кінцеві вимикачі, які відключають привід при підході до них.
При необхідності отримання високої точності регулювання положення і забезпечення якісного характеру руху виконавчого органу використовується замкнутий електропривод зі зворотним зв'язком по положенню. В цьому випадку система автоматично виробляє сигнал на початок гальмування і забезпечує задану точність зупинки виконавчого органу (наприклад, зупинка механічної руки робота)[3].
Система підпорядкованого регулювання положення є, по суті, доповненої системою регулювання швидкості, до якої доданий ще один контур. Перерахуємо контуру системи регулювання положення, починаючи з зовнішнього: контур положення, за ним йде контур швидкості, а самий внутрішній – контур струму. Таким чином, кожен контур за допомогою свого регулятора підтримує свою величину на необхідному рівні. Якщо ми хочемо регулювати становище, то краще, ніж ми можемо для цього управляти – це швидкість (частота обертання), тому що саме швидкість безпосередньо впливає на зміну положення (швидкість – це похідна від положення), а всі інші величини (струм, напруга і інше) впливають на стан більш складним чином, більш важким для регулювання. Далі, якщо ми тепер хочемо регулювати швидкість, то краще, ніж можемо управляти – це момент двигуна, так як момент визначає прискорення приводу, і воно також найпростішим математичним законом пов'язано зі швидкістю. Так як для двигуна момент пропорційний току (для двигуна постійного струму це справедливо в явному вигляді, а для двигунів змінного струму справедливо для моментообразующего складової струму в векторному керуванні), то для регулювання моменту потрібно керувати напругою на инверторе перетворювача, тому що струм і напруга теж пов'язані в першому наближенні через просте диференціальне рівняння [5].
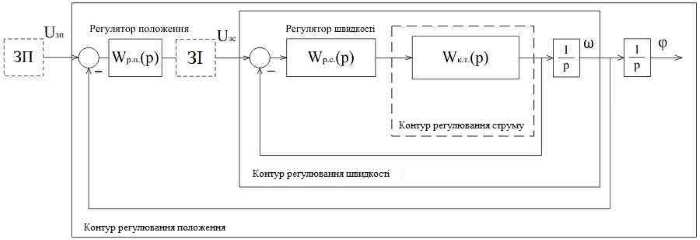
Рисунок 1 – Спрощена структурна схема САР положення
Система САР положення може мати різну структуру, а саме: 1. Присутній задатчик положення (ЗП) і лінійний регулятор положення (РП); 2. ЗП відсутній, є задатчик інтенсивності (ЗІ) з лінійним або параболічним РП; 3. Тільки з лінійним або параболічним РП.
3.2 Регулятори положення
За значеннями проміжних координат розрізняють три випадки:
– малі переміщення (рисунок 2а), що характеризуються лінійним режимом роботи, тобто в даному випадку ні прискорення, ні швидкість не досягають обмежень;
– середні переміщення (рисунок 2б), коли в насичення виходить регулятор струму, тобто прискорення досягає рівня обмеження;
– великі переміщення (рисунок 2в), коли при відпрацюванні швидкість і прискорення досягають своїх рівнів обмеження. [6]
Для відпрацювання малих переміщень в разі налаштування всіх контурів на модульний оптимум буде потрібний пропорційний регулятор положення. При наявності на валу двигуна моменту опору електропривод відпрацює мале переміщення зі статичної помилкою.
Налаштування на модульний оптимум дає процес з перерегулюванням по положенню, що для більшості механізмів або не бажано, або неприпустимо. Крім того, режим малих переміщень для більшості позиційних механізмів не є характерним. Тому така настройка при відпрацюванні середніх і великих переміщень не може гарантувати ні мінімального часу, ні відсутності перерегулювання, ні забезпечення заданої точності.
Для відпрацювання середніх переміщень за мінімальний час без перерегулювання коефіцієнт регулятора положення повинен змінюватися в залежності від значення початкової швидкості, а, отже, і від заданого кута. Тому, якщо коефіцієнт регулятора положення постійний, то тільки для одного значення початкової швидкості. Для інших же випадків – відпрацювання або з меншим уповільненням в кінці, тобто з дотягивание і час відпрацювання збільшиться, або буде мати місце перерегулирование і дотягивание. Для усунення небажаного перерегулирования коефіцієнт регулятора вибирається з умови рівності початкової швидкості і максимальної, що відповідає найбільшому середньому переміщенню. Таким чином, при заданому переміщенні більшому, ніж найбільше середнє, переміщення буде відпрацьовуватися як велике по трапецеидальному графіку без дотягування і перерегулювання [8].
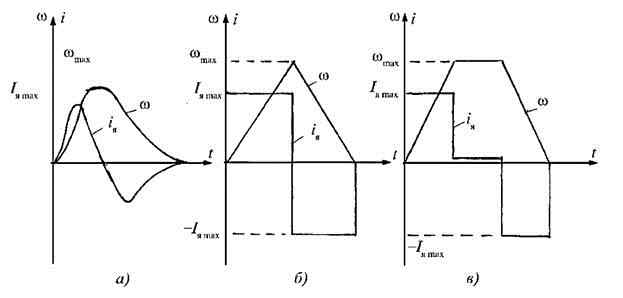
Рисунок 2 – Діаграма зміни швидкості і струму двигуна позиційного електроприводу при малому (а), середньому (б) і великому (в) переміщеннях
В системі регулювання положення побудова контурів струму і швидкості відбувається так само, як і в САР швидкості, а настройка регулятора положення вже залежить від того, з якими переміщеннями належить працювати системі. Таким чином, регулятор положення часто є пропорційним, а контур регулювання швидкості або пропорційним, або пропорційно-інтегральним. У випадку з пропорційним регулятором швидкості, при наявності статичного моменту опору, задане переміщення буде відпрацьовуватися з помилкою. Система з пропорційно-інтегральним регулятором швидкості є астатичною за впливом, що обурює.
У системах з регулятором положення так само застосовують ЗІ, який, в залежності від його структури, дозволяє обмежувати або ривок, або прискорення або прискорення і ривок.
Система, що має лінійний регулятор положення і ЗІ, може забезпечити тільки управління, оптимальне за швидкодією, при роботі по трапецеидальной тахограмi. Для роботи ж по трикутної тахограмi, що забезпечує оптимальне відпрацювання великих і середніх переміщень, необхідно використовувати регулятор положення з нелінійною характеристикою, налагодження якого є досить складним завданням.
Існують також системи з задатчиком інтенсивності зміни моменту. Такі системи можуть забезпечувати оптимальне за швидкодією управління лише в разі, коли відома величина статичного моменту, яка є незмінною. Недоліком даної системи є відсутність обмеження щодо прискорення, що в різних технологічних процесах може бути неприйнятним.
На рисунку 3 зображений ідеалізований раціональний графік руху електроприводу при відпрацюванні одиничного переміщення (кроку) виконавчого органу [3].
Рисунок 3 – Раціональний графік руху електроприводу
Найбільш раціональної вважається трикутна (трапецеїдальних) тахограмма при відпрацюванні середнього (великого) переміщення.
Це дозволяє в повній мірі використовувати перевантажувальну здатність двигуна і виключає виникнення перерегулирования по положенню. Для даної системи до електроприводу пред'являються такі вимоги: обмеження величини прискорення і ривка при формуванні завдання на швидкість і неприпустимість перерегулирования за положенням [4].
3.3 Задатчик положення
Розглянемо принцип роботи задатчика положення в розімкнутому циклі. Спочатку він формує діаграму завдання на прискорення
![]() у вигляді кусочно-лінійної апроксимації табличній залежності, вузлові точки якої розраховуються, виходячи з величини відпрацьовуваного переміщення
у вигляді кусочно-лінійної апроксимації табличній залежності, вузлові точки якої розраховуються, виходячи з величини відпрацьовуваного переміщення
![]() та бажаного часу його відпрацювання
та бажаного часу його відпрацювання
![]() з урахуванням обмежень на швидкість
з урахуванням обмежень на швидкість
![]() та прискорення
та прискорення
![]() приводу (а іноді й ривка
приводу (а іноді й ривка
![]() ) відповідно до прийнятого критерію оптимізації. Отриманий сигнал двічі інтегрується, в результаті чого виходять бажані діаграми зміни швидкості
) відповідно до прийнятого критерію оптимізації. Отриманий сигнал двічі інтегрується, в результаті чого виходять бажані діаграми зміни швидкості
![]() та положення
та положення
![]() відповідно [9].
відповідно [9].

а)
б)
Рисунок 4 – Структура задатчика положення, що працює за розімкненим принципом а) – без обмеження на ривок; б) – з обмеженням на ривок
До певних систем регулювання положення, як було зазначено раніше, пред'являються високі вимоги до точності, зокрема відсутність перерегулювання. Системи, що мають ЗП, мають невисоку швидкодію. Відбувається це через наявність трьох контурів регулювання (струму, швидкості, положення). Щоб зменшити перерегулирование, доводиться зменшувати коефіцієнт регулятора положення, що тягне за собою зниження швидкодії.
Для підвищення швидкодії використовують комбіноване управління за керуючому впливу. Воно полягає в розрахунку коефіцієнтів коригувальних ланок виходячи з умови модульного оптимуму (див. рисунок 5). Однак й така структура не дозволяє позбавитись повністю від перерегулирования.
а)
б)
Рисунок 5 – Структура ЗП, що реалізує комбіноване управління за керуючим впливом: а) – без обмеження на ривок; б) – з обмеженням на ривок
Існує метод, що дозволяє параметріровать системи підлеглого регулювання використовуючи стандартні поліноми, які використовуються при синтезі модального управління. Таким чином, можна досягти або наявності дуже малого перерегулирования, або його відсутності зовсім [10].
4. Вибір мікроконтролера
Для реалізації поставленої задачі автоматизації потрібна достатня швидкодія, а так само робота з АЦП.
Завданням плати буде як прийом, так і передача сигналів. В залежності від варіанту реалізації системи, буде або 1 або 4 керуючих сигналу, а отриманими сигналами будуть ток якоря, напруга та сигнал датчика положення.
Оценив усі необхідні параметри, вибір пав на відлагоджувальну плату STM32F4Discovery. Дана плата має на своїй базі мікроконтролер STM32F407VGT6 (168 МГц, 1 Мб Flash, 192 Кб ОЗУ, LQFP100), що володіє достатньою потужністю для коректної роботи системи управління.
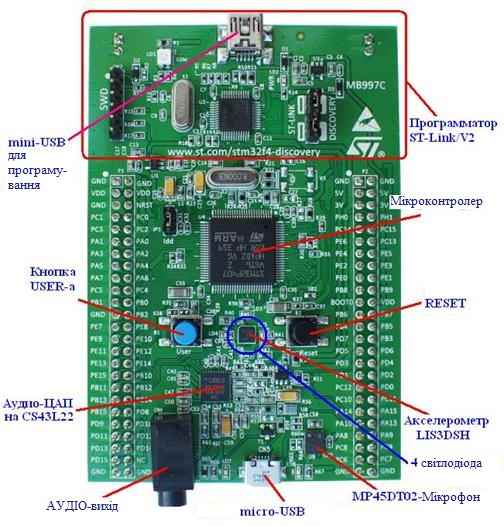
Рисунок 6 – Зовнішній вигляд плати
Так само важливим фактором є можливість програмувати плату через програмний пакет Matlab\Simulink. Для реалізації поставленої задачі існує додаток Waijung, який дозволяє зручно програмувати різні мікропроцесорні плати, включаючи використовувану в даній роботі.
Основні характеристики цієї плати:
- 32-бітний мікроконтролер STM32F407VGT6 p ядром ARM Cortex-M4F с 1 Мб пам'яті програм та 193 Кб ОЗУ у 100-вивідному корпусі LQFP100 з тактовою частотою 168 МГц. Вбудовані операції з плаваючою точкою (FPU)
- Вбудований програматор / відладчик ST-LINK/V2 з можливістю вибору режиму роботи (позвоялет програмувати зовнішні мікросхеми, використовуючи SWD-коннектор для програмування та налагодження)
- Живлення плати: через шину USB або від зовнішнього 5В джерела живлення
- Живлення для зовнішніх пристроїв: 3В та 5В
- Вісім світлодіодів: LD1 (червоний / зелений) для індикації активності шини USB , LD2 (червоний) для живлення 3.3В, 4 користувальницьких діода: LD3 (помаранчевий), LD4 (Зелений), LD5 (червоний) та LD6 (синій), 2 діода USB OTG : LD7 (зелений ) для VBus та LD8 (червоний) при перевантаженні
- Дві кнопки (Reset та User)
- USB OTGз роз'ємомmicro-AB
- Вивідні колодки для всіх контактів введення / виведення мікроконтролера для швидкого підключення до макетної платі та простого проведення вимірювань
Великим плюсом є наявність в мікроконтролері модуля для роботи з числами з плаваючою точкою, що збільшує швидкість обробки в програмах, пов'язаних, наприклад зі спектральним аналізом (для обчислення ШПФ) або ж в БПЛА для алгоритмів орієнтації [7].
Список джерел
- Босак А.В. Управление позиционным электроприводом с неавтономной задающей моделью и нечеткими регуляторами. Дисс. ... Канд. тех. наук. Киев, 2016. 212 с.
- Электрический привод: Учеб. пособие для сред. проф. образования / Москаленко В.В. – 2-е изд., стед. – М.: Издательский центр
Академия
СПО 2004. – 368 с. - Регулирование положения электроприводов
Режим доступа:Life-Prog
. - Чалый В.В. Синтез систем управления электромеханическими обьектами с применением интеллектуальных модулей на основе оборудования фирмы Control Technique – электронный ресурс. Режим доступа:
Портал магистров ДонНТУ
- Поддержание положения в сервоприводе: подчинённое регулирование vs шаговый режим – электронный ресурс. Режим доступа:
GeekTimes
- САР положения электропривода – электронный ресурс. Режим доступа:
Exponenta
- Оценочная плата STM32F4 Discovery с STM32F407 – электронный ресурс. Режим доступа:
Роботоша
- Машиностроение. Энциклопедия / ред. совет: К.В. Фролов (пред.) и др. М38 М.: Машиностроение. Электроприводы. Т. IV-2 / Л.Б. Масандилов, Ю.Н. Сергиевский, С.К. Козырев и др.; под общ. ред. Л.Б. Масандилова, 2012. 520 с.: ил.
- Толочко О.И., Коцегуб П.Х., Розкаряка П. И. Особенности цифровой реализации оптимальных алгоритмов управления позиционным электроприводом // Вісник КДПУ. Випуск 3/2006 (39). Частина 1". – Кременчук: КДПУ. – 2004. – С. 8-11.
- Розкаряка, П.И. Разработка оптимальных по тепловым потерям систем управления позиционным электроприводом : дис. ... канд. техн. наук : 05.09.03: защищена 07.10.10 / П. И. Розкаряка. – Донецк, 2010. – 230с.