
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования, планируемые результаты
- 3. Регулирование положения
- 3.1 Общие сведения
- 3.2 Регуляторы положения
- 3.3 Задатчик положения
- 4. Выбор микроконтроллера
- Список источников
Введение
Производство на современных предприятиях сложно представить без электромеханических систем, имеющих регулирование по положению. Их еще называют позиционными. Примерами установок с позиционным электроприводом могут служить различные подъемно транспортные установки, некоторые типы роботов, манипуляторы [1]. Наиболее часто позиционирование осуществляется при использовании сервоприводов, которые могут быть реализованы как на базе двигателя постоянного, так и переменного токов.
1. Актуальность темы
С увеличением требований к качеству продукции возрастают требования и к точности реализации управляющих воздействий в позиционных системах. Также немаловажным фактором является стоимость и время разработки и наладки подобных систем. Поэтому возникает вопрос в выборе подходящего микроконтроллера и используемого программного обеспечения для его программирования.
2. Цель и задачи исследования, планируемые результаты
Целью данной работы является разработка и реализация системы подчиненного регулирования положения электроприводом. Для решения задачи потребуется выбрать микроконтроллер, имеющий достаточную мощность для работы системы управления в режиме реального времени, датчики тока на эффекте Холла, датчики скорости и положения. Система будет реализовываться на базе уже имеющегося лабораторного стенда, включающем в себя два двигателя постоянного тока, тахогенератор и датчик положения, два тиристорных преобразователя, гальванические развязки и микропроцессорную плату, выбранную для реализации поставленной задачи.
3. Регулирование положения
3.1 Общие сведения
Для обеспечения выполнения ряда технологических процессов требуется перемещение исполнительных органов рабочих машин и механизмов в заданную точку пространства или плоскости и их установка там (фиксирование) с заданной точностью [2].
В случаях, когда точность позиционирования не является высокой, применяются концевые выключатели, которые отключают привод при подходе к ним.
При необходимости получения высокой точности регулирования положения и обеспечения качественного характера движения исполнительного органа используется замкнутый электропривод с обратной связью по положению. В этом случае система автоматически вырабатывает сигнал на начало торможения и обеспечивает заданную точность останова исполнительного органа (например, останов механической руки робота) [3].
Система подчиненного регулирования положения является, по сути, дополненной системой регулирования скорости, к которой добавлен ещё один контур. Перечислим контура системы регулирования положения, начиная с внешнего: контур положения, за ним идёт контур скорости, а самый внутренний – контур тока. Таким образом, каждый контур посредством своего регулятора поддерживает свою величину на необходимом уровне. Если мы хотим регулировать положение, то лучшее, чем мы можем для этого управлять – это скорость (частота вращения), потому что именно скорость напрямую влияет на изменение положения (скорость – это производная от положения), а все остальные величины (ток, напряжение и прочее) влияют на положение более сложным образом, более трудным для регулирования. Далее, если мы теперь хотим регулировать скорость, то лучшее, чем можем управлять – это момент двигателя, так как момент определяет ускорение привода, и оно также самым простым математическим законом связано со скоростью. Так как для двигателя момент пропорционален току (для двигателя постоянного тока это справедливо в явном виде, а для двигателей переменного тока справедливо для моментообразующего составляющей тока в векторном управлении), то для регулирования момента нужно управлять напряжением на инверторе преобразователя, потому что ток и напряжение тоже связаны в первом приближении через простое дифференциальное уравнение [5].
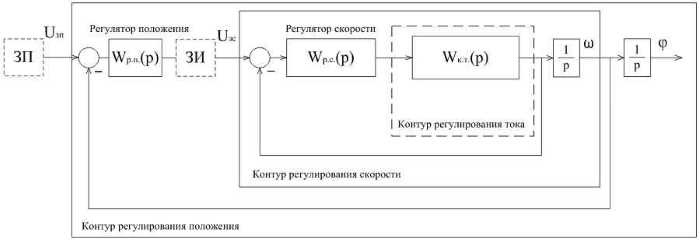
Рисунок 1 – Упрощенная структурная схема САР положения
Система САР положения может иметь различную структуру, а именно: 1. Присутствует задатчик положения (ЗП) и линейный регулятор положения (РП); 2. ЗП отсутствует, имеется задатчик интенсивности (ЗИ) с линейным либо параболическим РП; 3. Только с линейным либо параболическим РП.
3.2 Регуляторы положения
По значениям промежуточных координат различают три случая:
– малые перемещения (рисунок 2а), характеризующиеся линейным режимом работы, т.е. в данном случае ни ускорение, ни скорость не достигают ограничений;
– средние перемещения (рисунок 2б), когда в насыщение выходит регулятор тока, т.е. ускорение достигает уровня ограничения;
– большие перемещения (рисунок 2в), когда при отработке скорость и ускорение достигают своих уровней ограничения. [6]
Для отработки малых перемещений в случае настройки всех контуров на модульный оптимум потребуется пропорциональный регулятор положения. При наличии на валу двигателя момента сопротивления электропривод отработает малое перемещение со статической ошибкой.
Настройка на модульный оптимум даёт процесс с перерегулированием по положению, что для большинства механизмов либо не желательно, либо недопустимо. Кроме того, режим малых перемещений для большинства позиционных механизмов не является характерным. Поэтому такая настройка при отработке средних и больших перемещений не может гарантировать ни минимального времени, ни отсутствия перерегулирования, ни обеспечения заданной точности.
Для отработки средних перемещений за минимальное время без перерегулирования коэффициент регулятора положения должен изменятся в зависимости от значения начальной скорости, а, следовательно, и от заданного угла. Поэтому, если коэффициент регулятора положения постоянен, то только для одного значения начальной скорости. Для других же случаев – отработка либо с меньшим замедлением в конце, т.е. с дотягиванием и время отработки увеличится, либо будет иметь место перерегулирование и дотягивание. Для устранения нежелательного перерегулирования коэффициент регулятора выбирается из условия равенства начальной скорости и максимальной, что соответствует наибольшему среднему перемещению. Таким образом, при заданном перемещении большем, чем наибольшее среднее, перемещение будет отрабатываться как большое по трапецеидальному графику без дотягивания и перерегулирования [8].
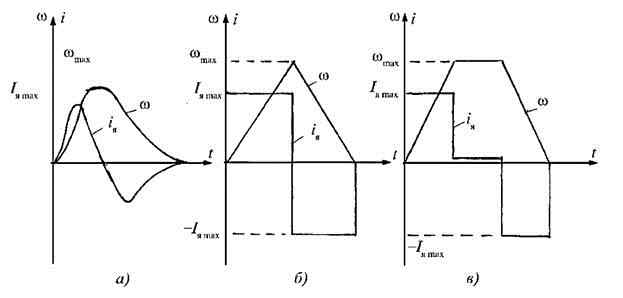
Рисунок 2 – Диаграмма изменения скорости и тока двигателя позиционного электропривода при малом (а), среднем (б) и большом (в) перемещениях
В системе регулирования положения построение контуров тока и скорости происходит так же, как и в САР скорости, а настройка регулятора положения уже зависит от того, с какими перемещениями предстоит работать системе. Таким образом, регулятор положения зачастую является пропорциональным, а контур регулирования скорости либо пропорциональным, либо пропорционально-интегральным. В случае с пропорциональным регулятором скорости, при наличии статического момента сопротивления, заданное перемещение будет отрабатываться с ошибкой. Система с пропорционально-интегральным регулятором скорости является астатической по возмущающему воздействию.
В системах с регулятором положения так же применяют ЗИ, который, в зависимости от его структуры, позволяет ограничивать либо рывок, либо ускорение либо и ускорение и рывок.
Система, имеющая линейный регулятор положения и ЗИ, может обеспечить только управление, оптимальное по быстродействию, при работе по трапецеидальной тахограмме. Для работы же по треугольной тахограмме, обеспечивающей оптимальную отработку больших и средних перемещений, необходимо использовать регулятор положения с нелинейной характеристикой, наладка которого является достаточно сложной задачей.
Существуют так же системы с задатчиком интенсивности изменения момента. Такие системы могут обеспечивать оптимальное по быстродействию управление лишь в случае, когда известна величина статического момента, которая является неизменной. Недостатком данной системы является отсутствие ограничения по ускорению, что в различных технологических процессах может являться неприемлемым.
На рисунке 3 показан идеализированный рациональный график движения электропривода при отработке единичного перемещения (шага) исполнительного органа [3].
Рисунок 3 – Рациональный график движения электропривода (вес: 109 КБ, количество повторений: 10, интервал между кадрами: 200 мс.)
Наиболее рациональной считается треугольная (трапецеидальная) тахограмма при отработке среднего(большого) перемещения.
Это позволяет в полной мере использовать перегрузочную способность двигателя и исключает возникновение перерегулирования по положению. Для рассматриваемой системы к электроприводу предъявляются следующие требования: ограничение величины ускорения и рывка при формировании задания на скорость и недопустимость перерегулирования по положению [4].
3.3 Задатчик положения
Рассмотрим принцип работы задатчик положения в разомкнутом цикле. Вначале
он формируют диаграмму задания на ускорение
![]() в виде кусочно-линейной аппроксимации табличной зависимости, узловые точки
которой рассчитываются, исходя из величины отрабатываемого перемещения
в виде кусочно-линейной аппроксимации табличной зависимости, узловые точки
которой рассчитываются, исходя из величины отрабатываемого перемещения
![]() и желаемого времени его отработки
и желаемого времени его отработки
![]() с учетом ограничений на скорость
с учетом ограничений на скорость
![]() и ускорение
и ускорение
![]() привода (а иногда и рывка
привода (а иногда и рывка
![]() ) в соответствии с принятым критерием оптимизации. Полученный сигнал дважды
интегрируется, в результате чего получаются желаемые диаграммы изменения
скорости
) в соответствии с принятым критерием оптимизации. Полученный сигнал дважды
интегрируется, в результате чего получаются желаемые диаграммы изменения
скорости
![]() и положения
и положения
![]() соответственно [9].
соответственно [9].

а)
б)
Рисунок 4 – Структура задатчика положения, работающего по разомкнутому принципу а) – без ограничения на рывок; б) – с ограничением на рывок
К определённым системам регулирования положения, как было отмечено ранее, предъявляются высокие требования к точности, в частности отсутствие перерегулирования. Системы, имеющие ЗП, имеют невысокое быстродействие. Происходит это из-за наличия трёх контуров регулирования (тока, скорости, положения). Чтобы понизить перерегулирование, приходится уменьшать коэффициент регулятора положения, что влечет за собой снижение быстродействия.
Для повышения быстродействия используют комбинированное управление по управляющему воздействию. Оно заключается в расчете коэффициентов корректирующих звеньев исходя из условия модульного оптимума (см. рисунок 5). Однако и такая структура не позволяет избавиться полностью от перерегулирования.
а)
б)
Рисунок 5 – Структура ЗП, реализующая комбинированное управление по управляющему воздействию: а) – без ограничения на рывок; б) – с ограничением на рывок
Существуют метод, позволяющий параметрировать системы подчиненного регулирования используя стандартные полиномы, используемые при синтезе модального управления. Таким образом, можно достичь либо наличие очень малого перерегулирования, либо его отсутствие вовсе [10].
4. Выбор микроконтроллера
Для реализации поставленной задачи автоматизации требуется достаточное быстродействие, а так же работа с АЦП.
Задачей платы будет как прием, так и передача сигналов. В зависимости от варианта реализации системы, будет либо 1 либо 4 управляющих сигнала, а получаемыми сигналами будут являться ток якоря, напряжение и сигнал датчика положения.
Оценив все необходимые параметры, выбор пал на отладочную плату STM32F4Discovery. Данная плата имеет на своей базе микроконтроллер STM32F407VGT6 (168 МГц, 1 Мб Flash, 192 Кб ОЗУ, LQFP100), обладающий достаточной мощностью для корректной работы системы управления.
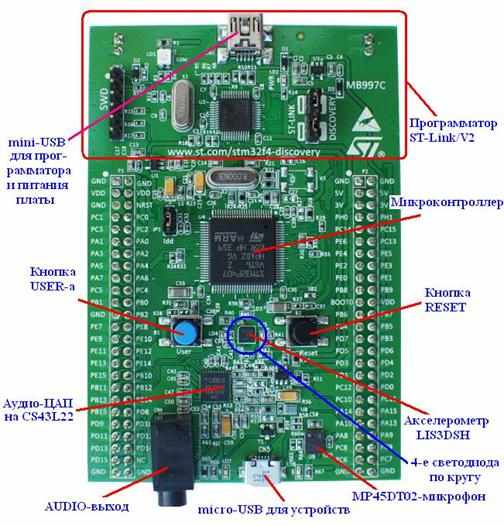
Рисунок 6 – Внешний вид платы
Так же немаловажным фактором является возможность программировать плату через программный пакет Matlab\Simulink. Для реализации поставленной задачи существует дополнение Waijung, позволяющий удобно программировать различные микропроцессорные платы, включая используемую в данной работе.
Основные характеристики этой платы:
- 32-битный микроконтроллер STM32F407VGT6 с ядром ARM Cortex-M4F с 1 Мб памяти программ и 193 Кб ОЗУ в 100-выводном корпусе LQFP100 с тактовой частотой 168 МГц. Встроенные операции с плавающей точкой (FPU)
- Встроенный программатор/отладчик ST-LINK/V2 с возможностью выбора режима работы (позвоялет программировать внешние микросхемы, используя SWD-коннектор для программирования и отладки)
- Питание платы: через шину USB или от внешнего 5В источника питания
- Питание для внешних устройств: 3В и 5В
- Восемь светодиодов: LD1 (красный/зеленый) для индикации активности шины USB, LD2 (красный) для питания 3.3В, 4 пользовательских диода: LD3 (оранжевый), LD4 (зеленый), LD5 (красный) и LD6 (синий), 2 диодаUSB OTG: LD7 (зеленый) для VBus и LD8 (красный) при перегрузке
- Две кнопки (Reset и User)
- USB OTGс разъемом micro-AB
- Выводные колодки для всех контактов ввода/вывода микроконтроллера для быстрого подключения к макетной плате и простого проведения измерений
Большим плюсом является наличие в микроконтроллере модуля для работы с числами с плавающей точкой, что увеличивает скорость обработки в приложениях, связанных, например со спектральным анализом (для вычисления БПФ) или же в БПЛА для алгоритмов ориентации [7].
Список источников
- Босак А.В. Управление позиционным электроприводом с неавтономной задающей моделью и нечеткими регуляторами. Дисс. ... Канд. тех. наук. Киев, 2016. 212 с.
- Электрический привод: Учеб. пособие для сред. проф. образования / Москаленко В.В. – 2-е изд., стед. – М.: Издательский центр
Академия
СПО 2004. – 368 с. - Регулирование положения электроприводов
Режим доступа:Life-Prog
. - Чалый В.В. Синтез систем управления электромеханическими обьектами с применением интеллектуальных модулей на основе оборудования фирмы Control Technique – электронный ресурс. Режим доступа:
Портал магистров ДонНТУ
- Поддержание положения в сервоприводе: подчинённое регулирование vs шаговый режим – электронный ресурс. Режим доступа:
GeekTimes
- САР положения электропривода – электронный ресурс. Режим доступа:
Exponenta
- Оценочная плата STM32F4 Discovery с STM32F407 – электронный ресурс. Режим доступа:
Роботоша
- Машиностроение. Энциклопедия / ред. совет: К.В. Фролов (пред.) и др. М38 М.: Машиностроение. Электроприводы. Т. IV-2 / Л.Б. Масандилов, Ю.Н. Сергиевский, С.К. Козырев и др.; под общ. ред. Л.Б. Масандилова, 2012. 520 с.: ил.
- Толочко О.И., Коцегуб П.Х., Розкаряка П. И. Особенности цифровой реализации оптимальных алгоритмов управления позиционным электроприводом // Вісник КДПУ. Випуск 3/2006 (39). Частина 1". – Кременчук: КДПУ. – 2004. – С. 8-11.
- Розкаряка, П.И. Разработка оптимальных по тепловым потерям систем управления позиционным электроприводом : дис. ... канд. техн. наук : 05.09.03: защищена 07.10.10 / П. И. Розкаряка. – Донецк, 2010. – 230с.