
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования, планируемые результаты
- 3. Обзор исследуемого объекта
- 3.1 Обзор спутниковой антенны
- 3.2 Обзор датчиков и электропривода
- 3.3 Обзор микроконтроллера Arduino
- 4. Мои разработки
- 4.1 Принципиальная схема
- 4.2 Алгоритм управления
- Заключение
- Перечень ссылок
Введение
Трудно представить любое современное производство без использования систем автоматизации и промышленных регуляторов. В настоящее время наиболее часто используемым регулятором на технологическом производстве является пропорционально-интегрально-дифференциальный регулятор (ПИД-регулятор). Существует достаточно методик настройки ПИД-регулятора на технологический процесс, однако, традиционный метод ПИД-регулирования не может обеспечить приемлемое качество управления при меняющихся характеристиках сырья и материалов, дефиците обслуживающего персонала и среднем качестве используемого оборудования. Поэтому возникает потребность в разработке новых алгоритмов адаптивных ПИД-регуляторов. Анализ литературных источников показывает, что проблема адаптивного регулирования привлекает все большее внимание не только у отечественных и зарубежных специалистов, разработчиков средств и систем автоматизации, но и у потребителей этих средств.
При управлении сложными объектами, функционирующими в условиях не стационарности, широкое применение нашли адаптивные регуляторы, реализующие типовые ПИ- или ПИД-законы регулирования. Адаптивные контроллеры зарубежных и отечественных производителей: Ремиконт, Овен, Сименс, Микрол и т.д., как правило, реализуют метод Циглера-Николса. Следует отметить, что данный метод предполагает вывод объекта в область автоколебаний, за счет перехода на П-закон и грубого варьирования коэффициента усиления Кр. Однако, значительный ряд технологических процессов по условиям эксплуатации не допускают автоколебательного режима.
Адаптивностью называют способность системы изменяться при изменении внешних условий так, чтобы цель функционирования системы была достигнута, даже если изменения внешних условий препятствуют этому. Если не только выходная величина объекта изменяется вследствие внешних причин, но и динамические свойства объекта также изменяются во времени, то требуется дополнительное адаптивное свойство системы, которое обеспечивает согласование динамических свойств основного контура с изменяющимися динамическими свойствами объекта. Системы, реализующие этот принцип, называются адаптивными.
При проведении многих физических экспериментов необходимо обеспечить перемещение исследуемых объектов с минимальными угловыми отклонениями их рабочих плоскостей. Решение задач управления сложными техническими системами или объектами основано на разработке их математических моделей определяющих в дальнейшем алгоритм регулирования.
1. Актуальность темы
Актуальной проблемой современной теории и практики управления является создание, разработка и совершенствование новых перспективных подходов к решению задач управления сложными динамическими объектами. Примерами подобных объектов могут быть летательные и космические аппараты, манипуляционные и мобильные роботы, автономные и телеуправляемые подводные аппараты, различные технологические установки и процессы, станки и др. Одной из важнейших задач предприятий, функционирующих в жестких условиях рыночной экономики, является интенсификация производства, повышение качества продукции и снижение энергетических затрат на основе всемерного применения достижений научно-технического прогресса.
2. Цель и задачи исследования, планируемые результаты
Целью является: разработка системы позиционирования спутниковой антенны с учётом нелинейности объекта управления и особенностей следящих систем.
Задачами данного проекта являются:
- Провести обзор спутниковой антенны;
- Провести обзор датчиков и электропривода;
- Провести обзор микроконтроллера Arduino;
- Спроектировать структуру системы управления;
- Разработать принципиальную схему;
- Разработать алгоритм управления.
Основным путем решения поставленных задач является обеспечение широкого применения микропроцессорных контроллеров и ПЭВМ для создания АСУТП или отдельных систем автоматического управления сложными объектами управления. Основная задача состоит в том, что результаты магистерской работы и применение их на реальном устройстве должны показать, целесообразно ли внедрять такую систему в обширное использование, должны будут показать все достоинства и недостатки данного подхода.
3. Обзор исследуемого объекта
В данном разделе будет проведён обзор спутниковой антенны. И также, помимо устройства спутниковой антенны, рассмотрены микроконтроллер, датчики и двигатели, которые необходимы для реализации данного проекта.
3.1 Обзор спутниковой антенны [4]
Спутниковая антенна (антенна спутниковой связи) – антенна, используемая для приёма и (или) передачи радиосигналов между наземными станциями и искусственными спутниками Земли, в более узком значении – антенна, используемая при организации связи с ретрансляций через спутники. В спутниковой связи используются различные типы антенн, самые известные – зеркальные параболические антенны (спутниковые тарелки
), массово применяемые для приёма спутникового ТВ-вещания и в спутниковой связи. В зависимости от назначения системы спутниковой связи могут применяться и другие типы антенн.
Спутниковые антенны бывают:
- Слабонаправленные антенны:
- Антенны бегущей волны:
- Зеркальные антенны:
- Осесимметричные антенны:
Слабонаправленные (также всенаправленные) антенны используются для связи через низкоорбитальные и геостационарные спутники в спутниковых телефонах, спутниковом радио, приёме сигналов систем спутниковой навигации и других устройств, где нет возможности непрерывно ориентировать антенну.
Такие антенны имеют широкую диаграмму направленности, что приводит к приёму большого количества шумов (высокой шумовой температуре антенны) и малому отношению сигнал/шум для полезного сигнала на входе приёмника, а следовательно и к низкой пропускной способности системы в целом.
Антенны бегущей волны и близкие к ним (спиральные, волновой канал, логопериодические и т. д.), применяются в диапазонах метровых (англ. VHF) и дециметровых (англ. UHF) волн для приёма телеметрии и связи со спутниками на низких орбитах, обмена информацией с метеорологическими спутниками, в любительской радиосвязи через спутники, для некоторых специальных видов спутниковой связи.

Рисунок 3.1 – Антенна УКВ-связи с космическими кораблями

Рисунок 3.2 – Антенна приёма телеметрии и слежения за спутниками
Зеркальные антенны – наиболее распространенный класс спутниковых антенн. Применяются в различных диапазонах, от дециметровых волн до Ka-диапазона, и на различных типах станций – от систем индивидуального ТВ-приёма до центров космической связи. Могут иметь размер от десятков сантиметров до десятков метров.

Рисунок 3.3 – Антенны NEC Mark IV (32 метра, справа) и ТНА-57 (12 метров, левее) в Центре космической связи Дубна
Один и тот же рефлектор (зеркало) может использоваться в различных диапазонах частот при установке на него различных облучателей и выполнения требований по точности изготовления зеркала для самого высокочастотного (коротковолнового) из используемых диапазонов. Чем в более высокочастотном диапазоне используется антенна, тем уже её диаграмма направленности и выше усиление при одном и том же размере зеркала.
Кроме рефлектора и облучателя в состав антенны входит опорно-поворотное устройство, с помощью которого производится наведение антенны на спутник.
Осесимметричные антенны имеют симметричное зеркало, фокус которого расположен на оси симметрии. У прямофокусной антенны (англ. Prime Focus) облучатель устанавливается в точке фокуса, перед зеркалом.

Рисунок 3.4 – Прямофокусная антенна для приёма спутникового ТВ
Фазированные антенные решетки:
Фазированные антенные решетки (ФАР) используются для создания компактных антенн различных диапазонов.
На основе ФАР строятся в основном спутниковые антенны с малой апертурой. Такие антенны имеют ряд ограничений. Они могут работать только в одном узком диапазоне частот (например, работа во всем диапазоне от 10.7 до 12.75 ГГц с одной антенной на базе ФАР невозможна), сложны в разработке и изготовлении и имеют более высокую цену. На базе ФАР возможно создавать компактные спутниковые терминалы, они используются в составе носимых и подвижных станций диапазонов Ku и Ka, портативных терминалов Inmarsat BGAN (L-диапазон), носимых спутниковых станций военного назначения.
Также на базе ФАР выпускаются плоские компактные антенны для домашнего приёма спутникового ТВ, которые требуют для установки гораздо меньше места, чем классические тарелки
сравнимой апертуры и это позволяет размещать их не только на улице, но и в помещении (на окне, балконе, лоджии и т. п.) при условии, что место установки обеспечивает видимость спутника.
Принцип действия, управление:
Для работы через спутник прежде всего необходимо, чтобы между антенной и спутником обеспечивалась прямая видимость (не было препятствий, мешающих прохождению радиосигнала). При выполнении этого условия слабонаправленные антенны наведения не требуют. Направленная антенна должна быть ориентирована таким образом, чтобы направление на спутник совпадало с максимумом её диаграммы направленности. Малые антенны в низкочастотных диапазонах (L,C) имеют широкую диаграмму направленности. Например, для портативного терминала Inmarsat BGAN ширина ДН от 30 до 60 градусов. Такую антенну достаточно грубо сориентировать в нужном направлении, чтобы спутник попадал в ограниченный её диаграммой сектор. Антенны с узкой диаграммой направленности и высоким усилением требуют максимально точного наведения.
Элементы спутниковой антенны [5]:
Для приёма программ с того или иного спутника нужны: комплект аппаратуры для приема программ с любого спутника состоит минимум из трех основных элементов: антенна, конвертер, ресивер.
Антенны бывают: спутниковые антенны бывают различных типов, но основными и наиболее используемыми являются антенны с зеркалом в виде параболоида вращения, которые в свою очередь делятся на два основных класса: прямофокусные и офсетные. Все остальные типы спутниковых антенн являются весьма экзотическими и обычно уступают параболическим по соотношению цена/качество.
Спутниковая антенна состоит из зеркала, элементов крепления конвертера и подвески. Существует два типа подвесок: азимутально-угломестная и полярная. Антенны с азимутально-угломестной подвеской позволяют настроить антенну на какой-либо спутник и жестко ее зафиксировать. Полярная подвеска позволяет перенацеливать антенну с одного спутника на другой при помощи рычага-актуатора с электрическим приводом. Такая система позволяет принимать свыше сотни телевизионных программ. Название этого типа подвески произошло из-за того, что ось, вокруг которой в этом случае вращается антенна, получается направленной на Полярную звезду.
Конвертер – это небольшой электронный блок, который находится в фокусе антенны и собирает электромагнитный сигнал, отраженный от поверхности зеркала антенны, затем усиливает и преобразует его таким образом, чтобы можно было передать по кабелю. Важной характеристикой любого конвертера является величина дополнительного шума, который он вносит в принимаемый сигнал. Для конвертеров Ku-диапазона шум измеряется в децибелах (dB). Сейчас имеют распространение конвертеры с шумом от 0.5 до 0.2 dB. Шум конвертеров С-диапазона измеряется в градусах Кельвина (К). Эта величина лежит обычно в пределах от 11К до 18К. Чем меньше шум конвертера, тем он меньше вносит искажений в телевизионный сигнал и тем дороже соответственно, стоит.

Рисунок 3.5 – Спутниковая антенна с механизмом перемещения
By means actuator it is possible to receive a signal from all available satellites per one antenna.
Полярный подвес – механическое устройство для поворота спутниковой антенны на нужную позицию. Его возможно использовать на антенне большого диаметра. К нему часто подсоединяют двигатель.
Актуатор – электрическое устройство с одним двигателем что приводит к движению антенны на полярной подвеске.
Мотоподвес – устройство для движения спутниковой антенны где двигатель (актуатор) и подвес – единое целое. Обычно его используют для офсетных антенн размером до 1.3 метра. Питание электропривода берется от телевизионного кабеля (13/18 вольт).
Позиционер – центр управления поворотом антенны. Запоминает позиции спутников и подает питание на актуатор до тех пор пока не появится нужный сигнал со спутника.
Очень часто можно обойтись и без него. Возможно и самому крутить антенну на нужную позицию спутника. Но все это не очень удобно. И зачем, ведь всегда проще прицепить актуатор с позиционером или использовать мотоподвес и не лазать все время к антенне и терять драгоценное время. Но все же в таком случае (мотоподвес, актуатор) при переключении канала всегда нужно ждать поворота антенны от нескольких секунд до нескольких минут, что очень сильно раздражает. И вместо того что бы расслабится и переключать каналы в поисках чего либо интересного, всегда нужно ждать и смотреть в черный экран. К тому же через некоторое время в поворотных системах образуется так называемый люфт. Шестерни электропривода выходят из строя и нужно менять подвеску. А установив всего две спутниковые антенны – одну с мотором, а вторую на любимый спутник – любимые каналы будут быстро переключатся. Две антенны не так уж много.
Кажется что такого вида настройка очень сложный процесс, но на самом деле ее может проделать любой опытный установщик. Главное тщательно разобраться в основных принципах работы поворотного механизма для спутниковой антенны [7] .
Как известно – все спутники размещены на геостационарной орбите, на нулевой широте вокруг экватора. Такое размещение называют поясом Кларка. Спутники всегда на одном месте относительно земной поверхности. С земли же они видны от запада на восток к горизонту как бы полукругом – дугой.

Рисунок 3.6 – Процесс настройки
Крепим кронштейн строго вертикально по уровню, на нем устанавливаем антенну с поворотным механизмом.
Далее устанавливаем ось горизонтального вращения, нулевую позицию, строго на юг – АЗИМУТ
. Легко определить с помощью карты. На ней взять точку установки антенны и провести линию к югу. Ориентируемся по улицам, домам.
Компас может и допустить ошибку, но им тоже можно пользоваться. Легче всего настроить на спутник с параметрами места установки по долготе (меридиану). Так как позиции спутников определяют по долготе, на территории с тем же меридианом спутник будет размещен строго в позиции юг-север (для северного полушария – на юге). Например Москва долгота 37oE – настраиваем на Eutelsat 36.0oE.
ЭЛЕВАЦИЯ
– угол, на который наклонена полярная ось относительно вертикали. Настройка угла элевации – основа настройки мотоподвеса. Угол элевации легко определить так: 90 градусов – широта места приема. Но угла элевации не достаточно и подвес нужно еще наклонить на угол деклинации.
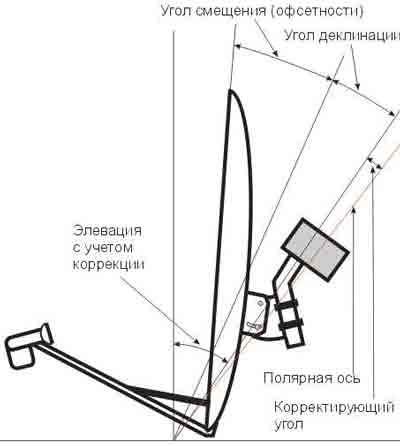
Рисунок 3.7 – Окончательная настройка
Если по простому, то это и есть основная настройка подвеса спутниковой антенны.
Ставим подвес в нулевую позицию – южный спутник и легко, сначала приподнимаем, а потом наклоняем антенну простым усилием рук.
Если сигнал увеличивается при подаче вверх, это скорее всего результат провисания подвески и мотора под собственным весом. В таком случае просто регулируем угол элевации и достигаем максимального сигнала.
Когда же сигнал увеличивается при напоре на антенну вниз, то это скорее всего это результат неточной установки углов или не вертикальность кронштейна. Тоже можно отрегулировать углом элевации.
Далее переходим к настройке крайних, одинаково отдаленных от южного, спутников. Настроившись на нужный спутник – запоминаем изменения сигнала при подаче антенны вверх и вниз. Дальше поворачиваем на другой спутник и проделываем те же манипуляции.
Автоматическое сопровождение спутника [1] – непрерывное удержание его в максимуме диаграммы направленности при движении относительно антенны. Автосопровождение может осуществляться как моторными приводами антенны, так и электронным управлением диаграммой направленности. Для автосопровождения требуется контроллер, управляющий наведением антенны. Автосопровождение применяется в следующих случаях:
- Станции для связи в движении, устанавливаемые на транспортных средствах (автомобилях, поездах, судах, самолетах). При движении положение антенны относительно спутника непрерывно меняется и требуется её удержание (стабилизация) в нужном направлении. Для удержания направления на спутник на движущихся объектах используются два метода. Первый – непрерывное определение направления, в котором смещается спутник относительно антенны, путем постоянного сканирования в узком секторе, не приводящем к существенному ухудшению сигнала. Второй – удержание положения антенны с помощью гироскопов и датчиков ускорений.
- Большие антенны, ширина диаграммы направленности которых сравнима с возможным отклонением геостационарного спутника от точки стояния. При использовании такой антенны без системы сопровождения уровень сигнала будет меняться в течение суток в соответствии с видимым движением спутника на небосклоне. Контроллер автосопровождения отслеживает уровень принимаемого со спутника сигнала и подводит антенну так, чтобы он был максимальным. Для стабильного удержания используется программное предсказание видимого смещения спутника на основании ранее накопленных данных и элементов его орбиты.
Антенны для работы со спутниками на негеостационарных орбитах. Спутник, находящийся на любой орбите, кроме геостационарной, непрерывно движется относительно земного наблюдателя. Скорость и траектория движения зависят от параметров орбиты. При использовании направленных антенн для работы с такими спутниками требуется их постоянное сопровождение, которое осуществляется на основе информации о местоположении станции и элементах орбиты спутника и может корректироваться по принимаемому сигналу.
Рисунок 3.8 – Вращение спутниковой антенны [gif-анимация. 20 кадров, задержка 0,1сек, вечный повтор]
3.2 Обзор датчиков и электропривода
Автоматизация заключается в использовании датчиков:
Инкрементальный энкодер:
При помощи него определяется, например, положение вала электрического двигателя. В связи с тем что каждое устройство, в котором применяется вращение, обязательно должно быть оснащено прибором, контролирующим точность вращательного момента, популярными сферами использования подобных преобразователей являются системы точного перемещения. Основная цель, с которой применяется энкодер, – это измерение угла поворота объекта во время вращения. Энкодеры незаменимы в процессе производства на станкостроительных предприятиях, в робототехнических комплексах.
Энкодер – это датчик, применяемый в промышленной области с целью преобразования подконтрольной величины в электрический сигнал. Используют их также во многих современных измерительных приборах, которые нуждаются в регистрации высокоточных измерений углов, вращения, поворотов и наклонов [8].
Инкрементальный энкодер простой по конструкции, но при этом не показывает конкретное место положения своей ручки. Он показывает только направление поворота, а число делений поворота должен считать микроконтроллер [10].
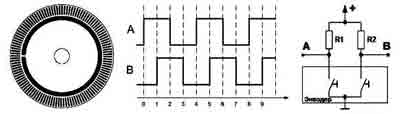
Рисунок 3.9 – Инкрементальный энкодер
Тип исследуемого двигателя со встроенным энкодером:
DC motor: JGB37-3530A-12V-111rpm [13]

Рисунок 3.10 – Двигатель постоянного тока с энкодером [14]
Принцип работы энкодера:
Энкодеры из 2-х функционально законченных узлов – источника оптического излучения и приемника этого излучения. Источник оптического излучения (передатчик) и приемник могут быть в одном корпусе или в разных корпусах.
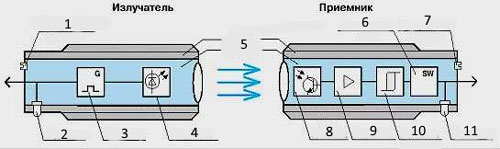
Рисунок 3.11 – Энкодер: 1 – Подстроечный механизм; 2 – Индикатор; 3 – Генератор; 4 – Излучатель; 5 – Корпус; 6 – Электронный ключ; 7 – Подстроечный элемент; 8 – Фотоприёмник; 9 – Усилитель; 10 – Пороговый элемент; 11 – Индикатор
Достоинства ДПТ [1]:
- простота конструкции;
- легкость в управлении;
- возможность регулирования частоты вращения вала;
- легкий запуск (особенно у двигателей с последовательным возбуждением);
- возможность использования в качестве генераторов;
- компактные размеры.
Обоснование:
- Более прост в эксплуатации;
- Его точность, в данном случае, удовлетворяет поставленной задачи;
- Не хранит информации с предыдущих запусков, после отсутствия питания и не считает импульсы на стоячем валу;
- У такого энкодера отчёт угла поворота начинается с нуля, а не на значении с момента выключения, для составления программного кода это очень удобно;
- Удобное расположение, на валу двигателя;
- Надёжная конструкция;
- Низкая цена.
Фоторезистор [16]:
Фоторезисторы дают возможность определять интенсивность освещения. Они маленькие, недорогие, требуют мало энергии, легки в использовании, практически не подвержены износу. Именно из-за этого они часто используются в игрушках, гаджетах и приспособлениях. Конечно, DIY-проекты на базе Arduino не могли обойти своим вниманием эти замечательные датчики.
Фоторезисторы по своей сути являются резисторами, которые изменяют свое сопротивление (измеряется в Ом) в зависимости от того, какое количество света попадает на их чувствительные элементы. Как уже говорилось выше, они очень дешевые, имеют различные размеры и технические характеристики, но в большинстве своем не очень точные. Каждый фоторезистор ведет себя несколько иначе по сравнению с другим, даже если они из одной партии от производителя. Различия в показаниях могут достигать 50% и даже больше. Так что рассчитывать на прецизионные измерения не стоит. В основном их используют для определения общего уровня освещенности в конкретных, локальных
, а не абсолютных
условиях.
Фоторезисторы являются отличным выбором для решения задач вроде вокруг темно или светло
, есть ли что-то перед датчиком (что ограничивает поступление света)
, какой из участков имеет максимальный уровень освещенности
.
Прозрачное покрытие всей поверхности
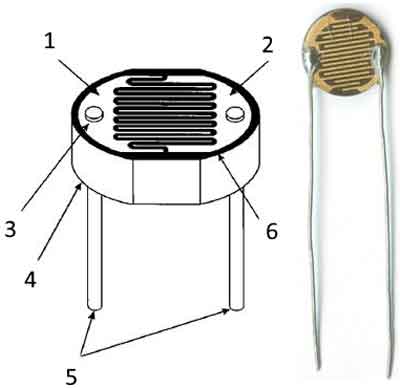
Рисунок 3.12 – Типичная конструкция фотоэлемента с пластиковым покрытием: 1 – 1-й электрод; 2 – 2-й электрод; 3 – Контакты холодного шва; 4 – Конденсатор; 5 – Проводные клемы; 6 – Фотопроводящий материал поверхности
3.3 Обзор микроконтроллера Arduino [18]
В качестве исполнительного механизма, программируемого микроконтроллера используется Arduino UNO R3, которая целиком и полностью справляется с поставленной для неё задачей.
Характеристики:
| Микроконтроллер | ATmega328 |
| Рабочее напряжение | 5 В |
| Напряжение питания (рекомендованное) | 7-12 В |
| Напряжение питания (предельное) | 6-20 В |
| Цифровые входы/выходы | 14 (6 из которых могут быть использовано как ШИМ-выходы) |
| Аналоговые входы | 6 |
| Максимальный ток одного вывода | 40 мА |
| Максимальный выходной ток вывода 3.3 V | 50 мА |
| Flash-память | 32 кБ (ATmega328) из которых 0,5 кБ используются загрузчиком |
| SRAM | 2 кБ (ATmega328) |
| EEPROM | 1 кБ (ATmega328) |
| Тактовая частота | 16 МГц |
Примечание: микроконтроллеры ATmega8, 168 или 328 полностью совместимы между собой по выводам.
Преимущества платы Arduino [2,3]:
- Arduino IDE основан на AVRGCC. Изучение Arduino поможет изучить C++. Если не подходит конкретная высокоуровневая команда или библиотека для Arduino, почти всегда можно заменить её на аналогичную C++.
- Возможно питать, программировать и обмениваться сообщениями с Arduino при помощи одного USB кабеля (или FTDI кабеля для некоторых клонов).
- Готовность к использованию (Ready to Use) – является самым большим плюсом Arduino. Уже имеется
на борту
регулятор питания, микроконтроллер, программатор, интерфейсы для подключения устройств, и программные библиотеки. Что значит не нужно думать о программировании микроконтроллера или способах подключения периферии. Нет необходимости изучать регистры микроконтроллера, диаграммы, блок-схемы и набор инструкций. Для работы с микроконтроллером следует просто подключить Arduino к USB порту ПК и можно приступать к работе. - Можно сделать простой проект за несколько минут, используя стандартные библиотеки, не вникая в них. Для считывания сигналов кнопок, вывода информации на семи сегментные или ЖК-дисплеи и управления двигателями для всего этого есть стандартные библиотеки, не требующие большого опыта в программировании.
- Последовательные и SPI интерфейсы связи сделаны превосходно.
- Легко понять как всё работает. От простого к сложному, от мигания светодиодом к метеостанции.
- Еще одним большим преимуществом Arduino является библиотека примеров идущая в комплекте. То, чего нет в поставке, легко находится в интернете, все библиотеки общедоступны, не потребуется много кодировать.
- Есть много интернет-форумов по теме Arduino. Инженеры, любители и профессионалы активно делятся своими проектами на Arduino. Можно легко найти помощь. К тому же сам сайт Arduino объясняет каждую функцию.
Обоснование: Данный контроллер выбран по объективным причинам [19]:
- Arduino Uno приемлем в цене;
- Имеет простой программный пакет;
- Простая конструкция;
- Широкое применение работы с разными операционными системами;
- Универсальный форм-фактор. Расположение пинов на этой плате де-факто стало стандартом, и большинство модулей (шилдов) для Arduino выпускается именно под Arduino UNO.
- Большинство готовых скетчей и библиотек работает под UNO. Несмотря на то, что в Pro Mini используется тот же микроконтроллер, загрузчики у них отличаются – соответственно отличаются и прошивки. Как и в других Arduino на этом же чипе. Хотя в основном библиотеки совместимы.
Вывод: Микроконтроллера Arduino Uno достаточно для выполнения поставленной задачи.
4. Мои разработки
4.1 Принципиальная схема
Данная принципиальная схема состоит из элементов:
- Исполнительный механизм, который представляет собой двигатель постоянного тока;
- Преобразователь – понижающий преобразователь напряжения с 220/12 выпрямителям на входе (выпрямитель представляет собой сочетание двух однополупериодных выпрямителей);
- Датчик – инкрементальный датчик угла поворота (энкодер);
- Контроллер – микроконтроллер Arduino UNO R3;
- Светодиоды;
- Источник питания.
Описание схемы: питание осуществляется от двухфазной сети переменного тока, проходя через выпрямитель, сигнал поступает на преобразователь DC/DC, затем этот преобразователь уже питает сам двигатель. Микроконтроллер подключён к преобразователю, задавая при этом направление и ширину импульса (tимп..). Также преобразователь подключён к энкодеру питая его и задавая значения выходов. Имеется сигнализация, которая представлена в виде трёх светодиодах проведённых через сопротивления для ограничения тока, сигнализирующих о поданном сигнале на преобразователь с контроллера. Двигатель с датчиком соединены механически. На аналоговый вход микроконтроллера подключён оптический датчик положения.
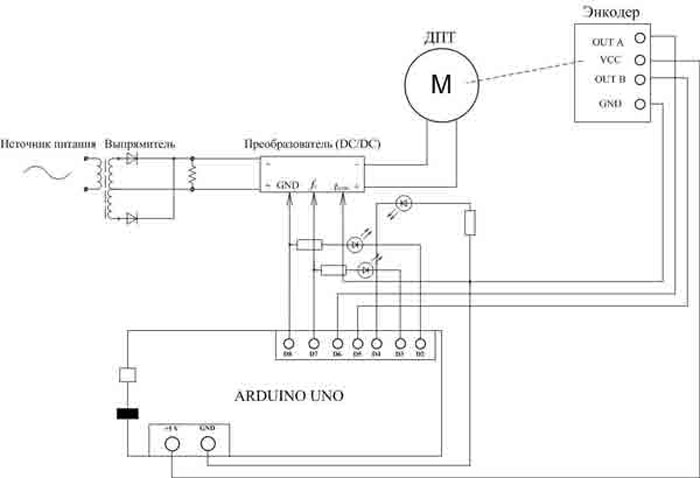
Рисунок 4.1 – Принципиальная схема
4.2 Алгоритм управления
В данном алгоритме присутствуют:
- Блок
начало
, который представляет собой начало цикла; - Блок задания начальных переменных;
- Блок выполнения действий, в котором формируется ошибка на текущем шаге;
- Блок выполнения действия, в котором формируется ПД-регулятор;
- Блок выполнения действий, в котором формируется ошибка на предыдущем шаге;
- Блок условий, в котором задаётся условия горения диода. Если оно выполняется, то индикация светодиода будет гореть, иначе нет;
- Светодиод земли будет гореть всегда, когда включено питание;
- Запись аналогового входа/выхода ПД-регулятора;
- Вывод сигналов ШИМ с энкодера;
- Задержка на 10 мс;
Конец
выполнения цикла.
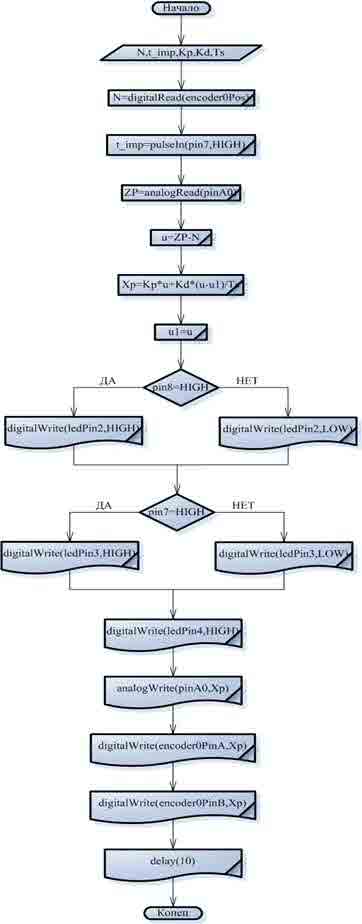
Рисунок 4.2 – Принципиальная схема
Заключение
В ходе выполнения данной работы была спроектирована система контроля поворота спутниковой антенны со световой индикацией. Было выбрано оборудование для автоматизации, в том числе микроконтроллер Arduino и инкрементальный энкодер. Также были спроектированы принципиальная электрическая схема, алгоритм работы программы и сама программа управления, написанная на языке Arduino.
| На момент сдачи работа не была закончена. Результаты ещё не обработаны и не применялись на реальном устройстве. Полное окончание планируется на лето 2018. |
Перечень ссылок
- Достоинства и недостатки ДПТ // Техника и человек. Режим доступа: http://zewerok.ru/...
- Преимущества и недостатки использования Arduino // Just for Fun. Режим доступа: http://tim4dev.com/...
- Преимущества Arduino UNO R3 // ТЕХНОХРЕНЬ. Режим доступа: http://skproj.ru/....
- Спутниковая антенна // Википедия. Режим доступа: https://ru.wikipedia.org/...
- Самостоятельная подборка комплектующих // Спутниковое TV. Режим доступа: http://sputnikovoetv.ucoz.com/...
- Устройство мотоподвес // Moy Sat Apparat. Режим доступа: http://www.moy-sat-apparat.ru/...
- Настройка мотоподвеса // Спутниковое телевидение. Режим доступа: http://satsputnik.ru/...
- Энкодер – это... Инкрементальный энкодер // FB.ru. Режим доступа: http://fb.ru/article/143314/...
- Инкрементальные энкодеры // SICK|STEGMANN. Режим доступа: http://www.platan.ru/...
- Виды энкодера // ЭЛЕКТРОСАМ.РУ. Режим доступа: http://electrosam.ru/...
- Принцип работы инкрементального энкодера // Mega Sensor. Режим доступа: http://www.megasensor.com/...
- Обработка множества инкрементальных энкодеров одновременно // EASY ELECTRONICS. Режим доступа: http://easyelectronics.ru/...
- Паспортные данные энкодера // AliExpress. Режим доступа: https://id.aliexpress.com/....
- Привод с энкодером // Alibaba. Режим доступа: https://www.alibaba.com/...
- Оптические датчики // АКАДЕМИК. Режим доступа: https://dic.academic.ru/...
- Фоторезисторы // Arduino-diy.com. Режим доступа: http://arduino-diy.com/...
- Оптический датчик // Оптические датчики положения. Режим доступа: http://www.e-ope.ee/...
- Ардуино УНО // ARDUINO.UA. Режим доступа: http://arduino.ru/...
- Преимущества Ардуино УНО // FB.ru. Режим доступа: http://fb.ru/...
- Подключение Ардуино // youtube.com. Режим доступа: https://www.youtube.com/...
- Подключение оптического датчика к Ардуино // ROBOTOCLASS. Режим доступа: http://robotclass.ru/...
- Двухфазный выпрямитель // Неуправляемые выпрямители. Режим доступа: http://thebard.narod.ru/...
- Оптические датчики // Википедия. Режим доступа: https://ru.wikipedia.org/...