
Abstract
Contents
- Introduction
- 1. Relevance of a subject
- 2. The purpose and research problems, the planned results
- 3. My developments
- 3.1 Schematic circuit
- 3.2 Control algorithm
- Conclusion
- List of references
Introduction
It is difficult to imagine any modern production without use of systems of automation and industrial controllers. Now the most often used controller on technological production is the proportional plus integral and differential controller (PID-controller). There are enough methods to configure the PID controller for the process, however, the traditional method of PID control cannot provide an acceptable quality of control in the changing characteristics of raw materials, deficiency of service personnel and the average poor of the used equipment. Therefore, there is a need to develop new algorithms of adaptive PID-controllers. The analysis of references shows that the problem of adaptive control attracts increasing attention not only of domestic and foreign specialists, developers of means and systems of automation, but also of consumers of these means.
When managing complex objects operating in non-stationary conditions, adaptive controllers, implementing standard PI or PID laws of control, have found wide application. Adaptive controllers of foreign and domestic manufacturers: Remikont, Aries, Siemens, Mikrol, etc., as a rule, implement the method of Ziegler-Nichols. It should be noted that this method involves the bringing the object in the area of autooscillation, due to the transition to the P-law and coarse variation of the gain of Kp. However, a significant number of technological processes on the operating conditions do not allow the autooscillating regime.
Adaptability refers to the ability of the system to change when external conditions are changed so that the goal of the system is achieved, even if changes in external conditions prevent it. If not only the output value of an object changes due to external causes, but also the dynamic properties of the object change over time, then an additional adaptive system property is required to ensure that dynamic properties are reconciled The main loop with the changing dynamic properties of the object. Systems implementing this principle are called adaptive.
When conducting many physical experiments, it is necessary to ensure the movement of the studied objects with minimal angular deviations of their work planes. The solution of problems of control of complex technical systems or objects is based on development of their mathematical models defining in the future the algorithm of control.
1. Relevance of a subject
The actual problem of modern theory and practice of control is creation, development and perfection of new perspective approaches to the solution of problems of control of complex dynamic objects. Examples of such objects can be aircraft and spacecraft, handling and mobile robots, autonomous and remotely controlled underwater devices, various technological installations and processes, machines, etc. One of the most important tasks of enterprises operating in hard conditions of market economy is intensification of production, improvement of product quality and reduction of energy costs on the basis of full application of achievements of scientific and technological progress.
2. The purpose and research problems, the planned results
The goal is: development of the positioning system of the satellite dish taking into account the nonlinearity of the control object and the peculiarities of the tracking systems.
Tasks of this project are:
- Carry out review the satellite dish;
- Carry out sensors and drive overview;
- Carry out Arduino microcontroller overview;
- Design the structure of the control system;
- Develop a schematic diagram;
- Develop the control algorithm.
The main way to solve the tasks is to ensure wide application of microprocessor controllers and PC for creation of ACSTP or separate systems of automatic control of complex objects of control. The main task is that the results of Master's work and their application on the real device should show whether it is expedient to introduce such system in extensive use, will have to show all advantages and disadvantages of this approach.
3. My developments
3.1 Schematic circuit
This schematic diagram consists of the following elements:
- An executive mechanism, which is a DC motor;
- Transformer – the step-down voltage transformer with 220/12 rectifiers at the inlet (rectifier is a combination of two single half-period rectifiers);
- Sensor – incremental sensor of rotation angle (encoder);
- Controller – Arduino UNO R3 microcontroller;
- LEDs;
- Power source.
Description of the scheme: the power is fed from the two-phase AC grid, passing through the rectifier, the signal arrives at the DC/DC converter, then this converter powers the motor itself. The microcontroller is connected to the converter, specifying the direction and width of the pulse (timp.). The converter is also connected to the encoder powering it and setting the output values. There is an alarm, which is represented in the form of three LEDs pulled-up through the resistance to limit the current, signaling the signal to the converter from the controller. The motor with the sensor is connected mechanically. An optical position sensor is connected to the analog input of the microcontroller.

Figure 3.1 – Schematic diagram
3.2 Control algorithm
This algorithm contains:
- The block is the beginning, which is the beginning of the cycle;
- The block of setting the initial variables;
- The block of execution of actions in which the error is generated in the current step;
- Block of execution of the action in which the PD-controller is formed;
- The block of execution of actions in which the error is generated in the previous step;
- A block of conditions in which the lighting conditions of the diode are set. If it is executed, the LED indication will be lit, otherwise not;
- The ground LED will always be lit when the power is turned on;
- Recording of analogue input/output of the PD-controller;
- Output of PWM signals from the encoder;
- Delay of 10 ms;
End
of loop execution.
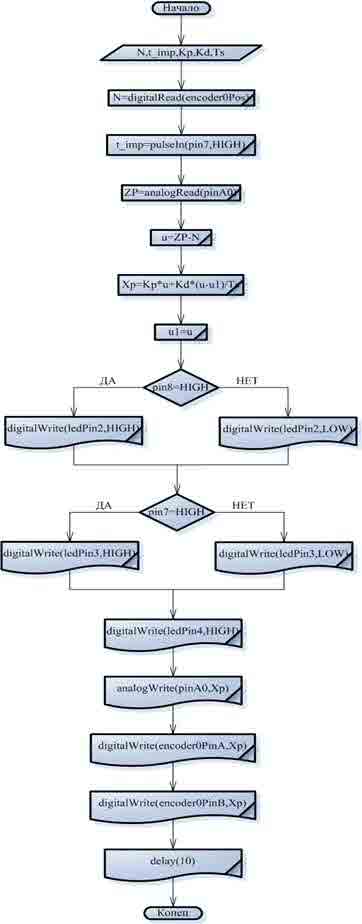
Figure 3.2 – Schematic diagram
Conclusion
In the course of this work the system of control of rotation of satellite aerial with light indication was designed. Automation equipment was selected, including the Arduino microcontroller and the incremental encoder. The basic electrical scheme, the algorithm of the program and the control program, written in the Arduino language, were also designed.
| The work was not finished at the time of delivery. The results have not yet been processed or applied on a real device. The complete ending is planned for the summer of 2018. |
List of references
- Достоинства и недостатки ДПТ [электронный ресурс]. Режим доступа: http://zewerok.ru/.... Свободный
- Преимущества и недостатки использования Arduino [электронный ресурс]. Режим доступа: http://tim4dev.com/.... Свободный
- Преимущества Arduino UNO r3 [электронный ресурс]. Режим доступа: http://skproj.ru/.... Свободный
- Спутниковая антенна [электронный ресурс]. Режим доступа: https://ru.wikipedia.org/.... Свободный
- Спутниковое TV [электронный ресурс]. Режим доступа: http://sputnikovoetv.ucoz.com/.... Свободный
- Устройство мотоподвес [электронный ресурс]. Режим доступа: http://www.moy-sat-apparat.ru/.... Свободный
- Настройка мотоподвеса [электронный ресурс]. Режим доступа: http://satsputnik.ru/.... Свободный
- Энкодер – это... Инкрементальный энкодер [электронный ресурс]. Режим доступа: http://fb.ru/article/143314/.... Свободный
- Инкрементальные энкодеры [электронный ресурс]. Режим доступа: http://www.platan.ru/.... Свободный
- Виды энкодера [электронный ресурс]. Режим доступа: http://electrosam.ru/.... Свободный
- Принцип работы инкрементального энкодера [электронный ресурс]. Режим доступа: http://www.megasensor.com/.... Свободный
- Обработка множества инкрементальных энкодеров одновременно [электронный ресурс]. Режим доступа: http://easyelectronics.ru/.... Свободный
- Паспортные данные энкодера [электронный ресурс]. Режим доступа: https://id.aliexpress.com/.... Свободный
- Привод с энкодером [электронный ресурс]. Режим доступа: https://www.alibaba.com/.... Свободный
- Оптические датчики [электронный ресурс]. Режим доступа: https://dic.academic.ru/.... Свободный
- Фоторезисторы [электронный ресурс]. Режим доступа: http://arduino-diy.com/.... Свободный
- Оптический датчик [электронный ресурс]. Режим доступа: http://www.e-ope.ee/.... Свободный
- Ардуино УНО [электронный ресурс]. Режим доступа: http://arduino.ru/.... Свободный
- Преимущества Ардуино УНО [электронный ресурс]. Режим доступа: http://fb.ru/.... Свободный
- Подключение Ардуино [электронный ресурс]. Режим доступа: https://www.youtube.com/.... Свободный
- Подключение оптического датчика к Ардуино [электронный ресурс]. Режим доступа: http://robotclass.ru/.... Свободный
- Двухфазный выпрямитель [электронный ресурс]. Режим доступа: http://thebard.narod.ru/.... Свободный
- Оптические датчики [электронный ресурс]. Режим доступа: https://ru.wikipedia.org/.... Свободный